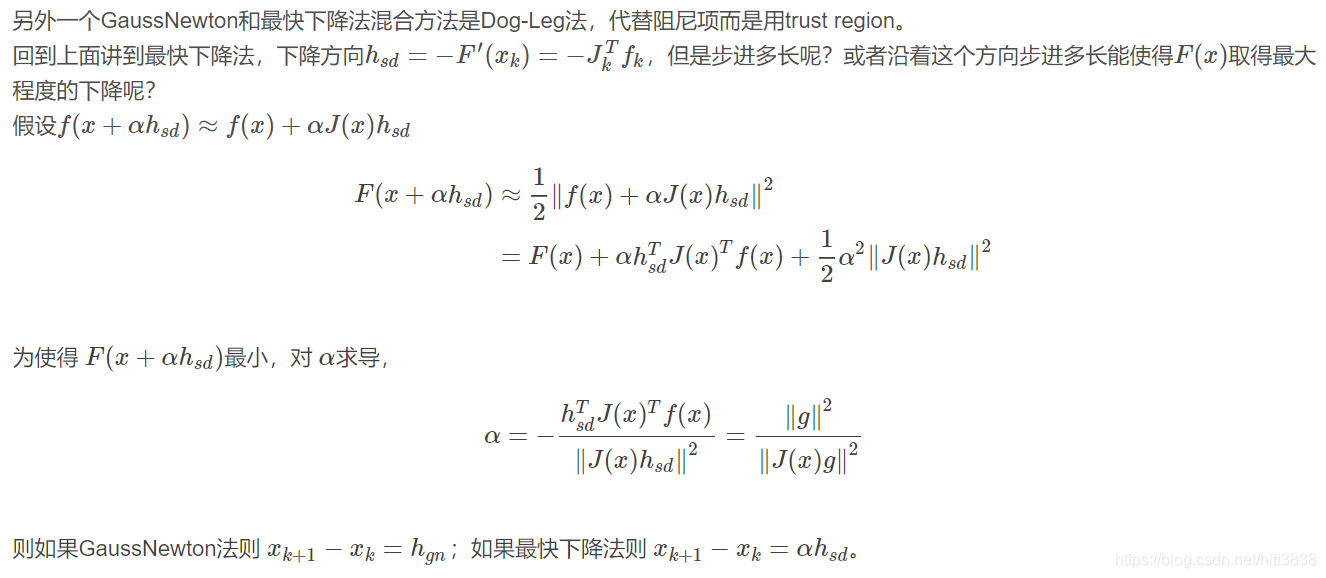
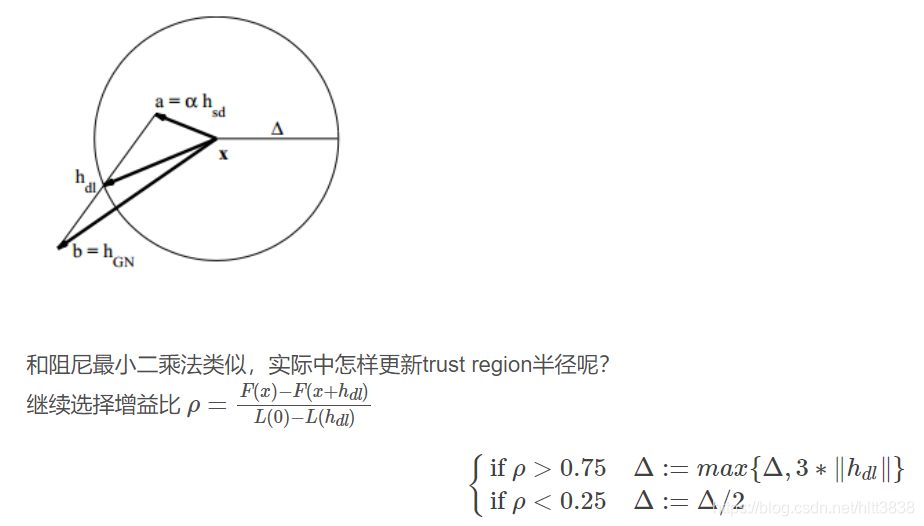
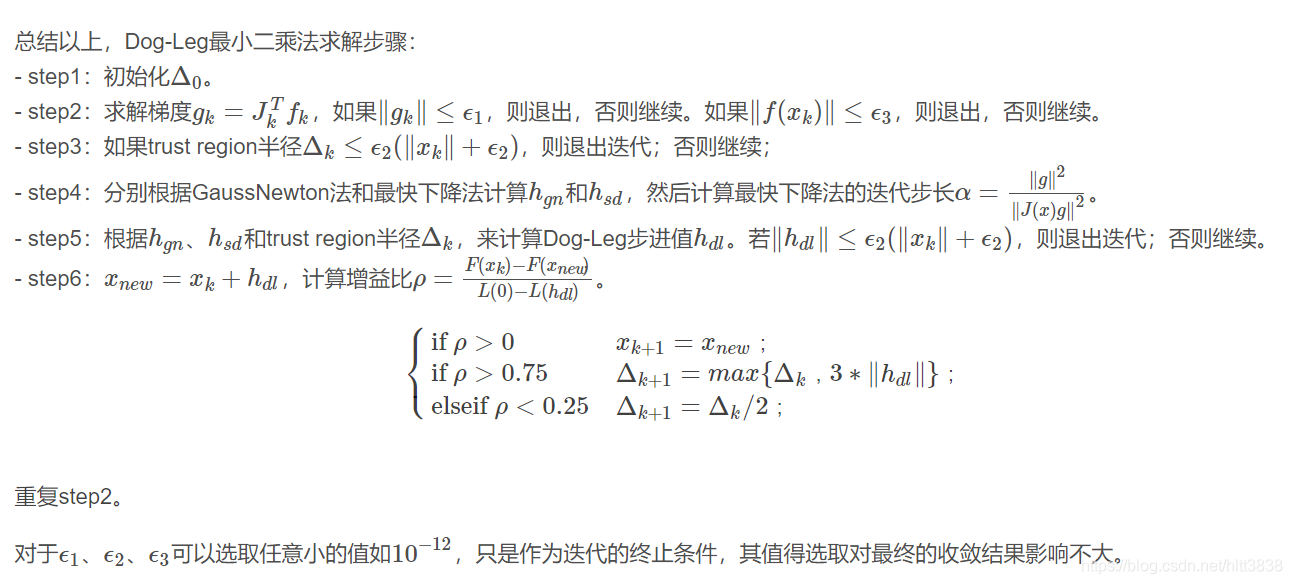
Dog-Leg最小二乘法

举例

Gauss Newton代码:
double func(const VectorXd& input, const VectorXd& output, const VectorXd& params, double objIndex)
{
// obj = A * sin(Bx) + C * cos(D*x) - F
double x1 = params(0);
double x2 = params(1);
double x3 = params(2);
double x4 = params(3);
double t = input(objIndex);
double f = output(objIndex);
return x1 * sin(x2 * t) + x3 * cos( x4 * t) - f;
}
//return vector make up of func() element.
VectorXd objF(const VectorXd& input, const VectorXd& output, const VectorXd& params)
{
VectorXd obj(input.rows());
for(int i = 0; i < input.rows(); i++)
obj(i) = func(input, output, params, i);
return obj;
}
//F = (f ^t * f)/2
double Func(const VectorXd& obj)
{
return obj.squaredNorm()/2;
}
double Deriv(const VectorXd& input, const VectorXd& output, int objIndex, const VectorXd& params,
int paraIndex)
{
VectorXd para1 = params;
VectorXd para2 = params;
para1(paraIndex) -= DERIV_STEP;
para2(paraIndex) += DERIV_STEP;
double obj1 = func(input, output, para1, objIndex);
double obj2 = func(input, output, para2, objIndex);
return (obj2 - obj1) / (2 * DERIV_STEP);
}
MatrixXd Jacobin(const VectorXd& input, const VectorXd& output, const VectorXd& params)
{
int rowNum = input.rows();
int colNum = params.rows();
MatrixXd Jac(rowNum, colNum);
for (int i = 0; i < rowNum; i++)
{
for (int j = 0; j < colNum; j++)
{
Jac(i,j) = Deriv(input, output, i, params, j);
}
}
return Jac;
}
void gaussNewton(const VectorXd& input, const VectorXd& output, VectorXd& params)
{
int errNum = input.rows(); //error num
int paraNum = params.rows(); //parameter num
VectorXd obj(errNum);
double last_sum = 0;
int iterCnt = 0;
while (iterCnt < MAX_ITER)
{
obj = objF(input, output, params);
double sum = 0;
sum = Func(obj);
cout << "Iterator index: " << iterCnt << endl;
cout << "parameter: " << endl << params << endl;
cout << "error sum: " << endl << sum << endl << endl;
if (fabs(sum - last_sum) <= 1e-12)
break;
last_sum = sum;
MatrixXd Jac = Jacobin(input, output, params);
VectorXd delta(paraNum);
delta = (Jac.transpose() * Jac).inverse() * Jac.transpose() * obj;
params -= delta;
iterCnt++;
}
}
LM代码:
double maxMatrixDiagonale(const MatrixXd& Hessian)
{
int max = 0;
for(int i = 0; i < Hessian.rows(); i++)
{
if(Hessian(i,i) > max)
max = Hessian(i,i);
}
return max;
}
//L(h) = F(x) + h^t*J^t*f + h^t*J^t*J*h/2
//deltaL = h^t * (u * h - g)/2
double linerDeltaL(const VectorXd& step, const VectorXd& gradient, const double u)
{
double L = step.transpose() * (u * step - gradient);
return L/2;
}
void levenMar(const VectorXd& input, const VectorXd& output, VectorXd& params)
{
int errNum = input.rows(); //error num
int paraNum = params.rows(); //parameter num
//initial parameter
VectorXd obj = objF(input,output,params);
MatrixXd Jac = Jacobin(input, output, params); //jacobin
MatrixXd A = Jac.transpose() * Jac; //Hessian
VectorXd gradient = Jac.transpose() * obj; //gradient
//initial parameter tao v epsilon1 epsilon2
double tao = 1e-3;
long long v = 2;
double eps1 = 1e-12, eps2 = 1e-12;
double u = tao * maxMatrixDiagonale(A);
bool found = gradient.norm() <= eps1;
if(found) return;
double last_sum = 0;
int iterCnt = 0;
while (iterCnt < MAX_ITER)
{
VectorXd obj = objF(input,output,params);
MatrixXd Jac = Jacobin(input, output, params); //jacobin
MatrixXd A = Jac.transpose() * Jac; //Hessian
VectorXd gradient = Jac.transpose() * obj; //gradient
if( gradient.norm() <= eps1 )
{
cout << "stop g(x) = 0 for a local minimizer optimizer." << endl;
break;
}
cout << "A: " << endl << A << endl;
VectorXd step = (A + u * MatrixXd::Identity(paraNum, paraNum)).inverse() * gradient; //negtive Hlm.
cout << "step: " << endl << step << endl;
if( step.norm() <= eps2*(params.norm() + eps2) )
{
cout << "stop because change in x is small" << endl;
break;
}
VectorXd paramsNew(params.rows());
paramsNew = params - step; //h_lm = -step;
//compute f(x)
obj = objF(input,output,params);
//compute f(x_new)
VectorXd obj_new = objF(input,output,paramsNew);
double deltaF = Func(obj) - Func(obj_new);
double deltaL = linerDeltaL(-1 * step, gradient, u);
double roi = deltaF / deltaL;
cout << "roi is : " << roi << endl;
if(roi > 0)
{
params = paramsNew;
u *= max(1.0/3.0, 1-pow(2*roi-1, 3));
v = 2;
}
else
{
u = u * v;
v = v * 2;
}
cout << "u = " << u << " v = " << v << endl;
iterCnt++;
cout << "Iterator " << iterCnt << " times, result is :" << endl << endl;
}
}
Dog-Leg代码:
void dogLeg(const VectorXd& input, const VectorXd& output, VectorXd& params)
{
int errNum = input.rows(); //error num
int paraNum = params.rows(); //parameter num
VectorXd obj = objF(input, output, params);
MatrixXd Jac = Jacobin(input, output, params); //jacobin
VectorXd gradient = Jac.transpose() * obj; //gradient
//initial parameter tao v epsilon1 epsilon2
double eps1 = 1e-12, eps2 = 1e-12, eps3 = 1e-12;
double radius = 1.0;
bool found = obj.norm() <= eps3 || gradient.norm() <= eps1;
if(found) return;
double last_sum = 0;
int iterCnt = 0;
while(iterCnt < MAX_ITER)
{
VectorXd obj = objF(input, output, params);
MatrixXd Jac = Jacobin(input, output, params); //jacobin
VectorXd gradient = Jac.transpose() * obj; //gradient
if( gradient.norm() <= eps1 )
{
cout << "stop F'(x) = g(x) = 0 for a global minimizer optimizer." << endl;
break;
}
if(obj.norm() <= eps3)
{
cout << "stop f(x) = 0 for f(x) is so small";
break;
}
//compute how far go along stepest descent direction.
double alpha = gradient.squaredNorm() / (Jac * gradient).squaredNorm();
//compute gauss newton step and stepest descent step.
VectorXd stepest_descent = -alpha * gradient;
VectorXd gauss_newton = (Jac.transpose() * Jac).inverse() * Jac.transpose() * obj * (-1);
double beta = 0;
//compute dog-leg step.
VectorXd dog_leg(params.rows());
if(gauss_newton.norm() <= radius)
dog_leg = gauss_newton;
else if(alpha * stepest_descent.norm() >= radius)
dog_leg = (radius / stepest_descent.norm()) * stepest_descent;
else
{
VectorXd a = alpha * stepest_descent;
VectorXd b = gauss_newton;
double c = a.transpose() * (b - a);
beta = (sqrt(c*c + (b-a).squaredNorm()*(radius*radius-a.squaredNorm()))-c)
/(b-a).squaredNorm();
dog_leg = alpha * stepest_descent + beta * (gauss_newton - alpha * stepest_descent);
}
cout << "dog-leg: " << endl << dog_leg << endl;
if(dog_leg.norm() <= eps2 *(params.norm() + eps2))
{
cout << "stop because change in x is small" << endl;
break;
}
VectorXd new_params(params.rows());
new_params = params + dog_leg;
cout << "new parameter is: " << endl << new_params << endl;
//compute f(x)
obj = objF(input,output,params);
//compute f(x_new)
VectorXd obj_new = objF(input,output,new_params);
//compute delta F = F(x) - F(x_new)
double deltaF = Func(obj) - Func(obj_new);
//compute delat L =L(0)-L(dog_leg)
double deltaL = 0;
if(gauss_newton.norm() <= radius)
deltaL = Func(obj);
else if(alpha * stepest_descent.norm() >= radius)
deltaL = radius*(2*alpha*gradient.norm() - radius)/(2.0*alpha);
else
{
VectorXd a = alpha * stepest_descent;
VectorXd b = gauss_newton;
double c = a.transpose() * (b - a);
beta = (sqrt(c*c + (b-a).squaredNorm()*(radius*radius-a.squaredNorm()))-c)
/(b-a).squaredNorm();
deltaL = alpha*(1-beta)*(1-beta)*gradient.squaredNorm()/2.0 + beta*(2.0-beta)*Func(obj);
}
double roi = deltaF / deltaL;
if(roi > 0)
{
params = new_params;
}
if(roi > 0.75)
{
radius = max(radius, 3.0 * dog_leg.norm());
}
else if(roi < 0.25)
{
radius = radius / 2.0;
if(radius <= eps2*(params.norm()+eps2))
{
cout << "trust region radius is too small." << endl;
break;
}
}
cout << "roi: " << roi << " dog-leg norm: " << dog_leg.norm() << endl;
cout << "radius: " << radius << endl;
iterCnt++;
cout << "Iterator " << iterCnt << " times" << endl << endl;
}
}
main()
#include <eigen3/Eigen/Dense>
#include <eigen3/Eigen/Sparse>
#include <iostream>
#include <iomanip>
#include <math.h>
using namespace std;
using namespace Eigen;
const double DERIV_STEP = 1e-5;
const int MAX_ITER = 100;
#define max(a,b) (((a)>(b))?(a):(b))
int main(int argc, char* argv[])
{
// obj = A * sin(Bx) + C * cos(D*x) - F
//there are 4 parameter: A, B, C, D.
int num_params = 4;
//generate random data using these parameter
int total_data = 100;
VectorXd input(total_data);
VectorXd output(total_data);
double A = 5, B= 1, C = 10, D = 2;
//load observation data
for (int i = 0; i < total_data; i++)
{
//generate a random variable [-10 10]
double x = 20.0 * ((random() % 1000) / 1000.0) - 10.0;
double deltaY = 2.0 * (random() % 1000) /1000.0;
double y = A*sin(B*x)+C*cos(D*x) + deltaY;
input(i) = x;
output(i) = y;
}
//gauss the parameters
VectorXd params_gaussNewton(num_params);
//init gauss
params_gaussNewton << 1.6, 1.4, 6.2, 1.7;
VectorXd params_levenMar = params_gaussNewton;
VectorXd params_dogLeg = params_gaussNewton;
gaussNewton(input, output, params_gaussNewton);
levenMar(input, output, params_levenMar);
dogLeg(input, output, params_dogLeg);
cout << "gauss newton parameter: " << endl << params_gaussNewton << endl << endl << endl;
cout << "Levenberg-Marquardt parameter: " << endl << params_levenMar << endl << endl << endl;
cout << "dog-leg parameter: " << endl << params_dogLeg << endl << endl << endl;
}

























 4946
4946











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









