







Chen X, Vizzo I, Läbe T, et al. Range Image-based LiDAR Localization for Autonomous Vehicles[J]. arXiv preprint arXiv:2105.12121, 2021. ICRA 2021,波恩大学;
针对问题:
使用更紧凑的先验LiDAR地图的进行LiDAR定位
提出方法:
在地图的表达上,使用激光雷达构建的mesh地图,在表达上更加紧凑;
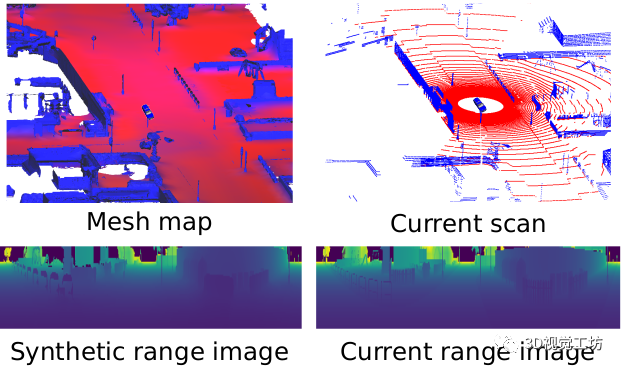
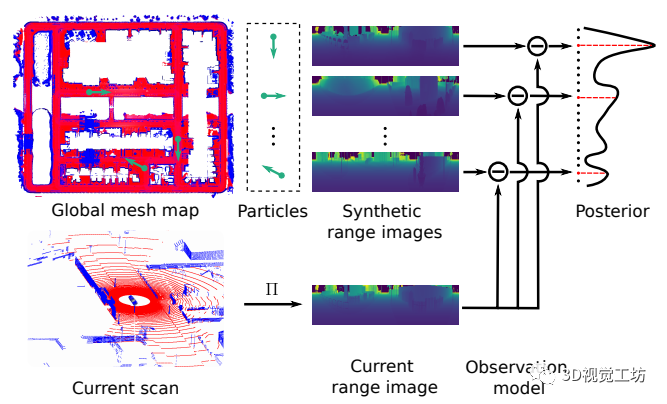
将3D LiDAR扫描的信息通过球面坐标投影生成Range Image作为观测,建立了基于Range Image的观测模型,通过粒子滤波实现基于先验地图的精确定位结果。
达到效果:
在Carla,IPB-Car,MulRan(KAIST)以及Apollo(Columbia-Park)数据集上进行定性定量验证,对系统的定位精度、3D Lidar的普遍适用性以及实时性进行评估,证明本文系统能够实现实时且准确的定位。
存在问题:
该方法构建的先验地图仍然是稠密形式的地图,在存储上仍然存在占用内存较大的影响;
该方法采用的传感器仍比较昂贵,虽然实验验证了在线数比较小的雷达上仍能够实现较好效果。可以考虑使用GAN网络结合RGB特征生成伪图像的方式与当前相机之间的RGB图像作为观测实现定位。
代码地址:在公众号「计算机视觉工坊」,后台回复「Range Image」,即可直接下载。
Abstract
鲁棒而准确的基于地图的定位对于自主移动系统至关重要。在本文中,我们利用3D LiDAR扫描产生的Range Image来解决移动机器人或自主汽车在由三角形网格表示的大规模户外环境地图中的定位问题。我们使用泊松表面重建来生成基于网格的地图表示。基于当前LiDAR扫描产生的Range Image和基于网格的地图的合成渲染视图,我们提出了一个新的观测模型,并将其整合到蒙特卡洛定位框架中,实验证明该模型实现了更好的定位性能,并能很好地适用于不同环境。我们用不同的LiDAR扫描仪在不同的环境中收集的多个数据集来测试所提出的定位方法。实验结果表明,我们的方法可以在不同的环境中可靠而准确地定位移动系统,并在LiDAR传感器的帧速率下在线运行,跟踪车辆的位姿。
Introduction
在本文中,我们不使用从三维激光雷达传感器获得的原始点云或从点云中生成或学习的特征,而是研究基于三维激光雷达的Range Image自主车辆的定位。我们将点云投影到Range Image中,并通过用三角形网格表示的地图的渲染视图来实现自主移动系统的定位。使用Range Image表示和用网格表示的地图有几个原因:圆柱形的Range Image是机械式三维激光雷达自然且轻量级的表示,而网格地图比大型点云更紧凑。这些特性使我们的方法能够在大规模环境中实现全局定位。此外,网状地图的范围图像的渲染可以使用计算机图形技术有效地进行。因此,Range Image和网状地图是实现基于LiDAR的全局定位的完美搭配。
The main contribution
本文的主要贡献是为基于LiDAR的三维定位建立了一个新的观测模型。我们的模型是基于从真实的LiDAR扫描和网状地图的合成渲染中产生的Range Image。我们使用它们之间的差异来制定蒙特卡洛定位(MCL)的观察模型,以更新粒子的重要性权重。基于我们</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1324
1324











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









