







目录
写在前面
参考:
[1] Modern Control Systems, Dorf and Bishop
[2] 自动控制原理,胡寿松
(一) 控制系统导论
系统框图的绘制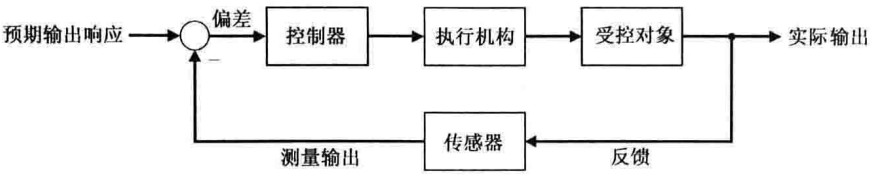
需要能够对一个控制系统绘制出相应的框图。(把每一部分找清楚,箭头上对应的是物理量)
大部分控制系统无非是为了跟踪输入,或是抑制扰动。
(二) 系统数学模型
(1) 微分方程
需要掌握一些基础知识:电路、电机等
注:胡寿松《自动控制原理》(第七版)P28运放我看不懂。
(2) 传递函数
线性系统的传递函数:当两个变量的初值都假定为零时,输出变量的拉普拉斯变换与输入变量的拉普拉斯变换之比。
初值定理:
lim
t
→
0
+
y
(
t
)
=
lim
s
→
∞
s
Y
(
s
)
\lim_{t\rightarrow0^+}y(t)=\lim_{s\rightarrow\infty}sY(s)
limt→0+y(t)=lims→∞sY(s) (比如:我们可以用来求
y
′
(
0
)
y'(0)
y′(0))
终值定理:
lim
t
→
∞
y
(
t
)
=
lim
s
→
0
s
Y
(
s
)
\lim_{t\rightarrow\infty}y(t)=\lim_{s\rightarrow0}sY(s)
limt→∞y(t)=lims→0sY(s)
(3) 方框图
方框图的绘制与简化
(4) 信号流图
信号流图只适用于线性系统,方框图也可用于非线性系统。
梅森增益公式:
T
=
∑
k
P
k
Δ
k
Δ
T=\frac{\sum_kP_k\Delta_k}\Delta
T=Δ∑kPkΔk
Δ
=
1
−
∑
n
=
1
N
L
n
+
∑
n
,
m
不
接
触
回
路
L
n
L
m
−
⋯
\Delta=1-\sum_{n=1}^NL_n+\sum_{n,m\mathrm{不接触回路}}L_nL_m-\cdots
Δ=1−n=1∑NLn+n,m不接触回路∑LnLm−⋯回路:起点和终点在同一节点,而且信号通过每一节点不多于一次的闭合通路。
不接触回路:回路之间没有公共节点。
例1:求
y
7
/
y
3
y_7/y_3
y7/y3
例2:求
y
6
/
y
1
y_6/y_1
y6/y1(注意:不要漏掉回路)

(三) 反馈控制系统的特性与性能
(1) 误差信号
误差信号
E
(
s
)
=
R
(
s
)
−
Y
(
s
)
E\left(s\right)=R\left(s\right)-Y\left(s\right)
E(s)=R(s)−Y(s)
E
(
s
)
=
1
1
+
L
(
s
)
R
(
s
)
−
G
(
s
)
1
+
L
(
s
)
T
d
(
s
)
+
L
(
s
)
1
+
L
(
s
)
N
(
s
)
E\left(s\right)=\frac1{1+L\left(s\right)}R\left(s\right)-\frac{G\left(s\right)}{1+L\left(s\right)}T_d\left(s\right)+\frac{L\left(s\right)}{1+L\left(s\right)}N\left(s\right)
E(s)=1+L(s)1R(s)−1+L(s)G(s)Td(s)+1+L(s)L(s)N(s)

对于非单位负反馈系统,等效单位负反馈系统的开环传递函数
Z
(
s
)
Z\left(s\right)
Z(s)为
Z
(
s
)
=
L
(
s
)
1
+
L
(
s
)
(
H
(
s
)
−
1
)
Z\left(s\right)=\frac{L\left(s\right)}{1+L\left(s\right)(H\left(s\right)-1)}
Z(s)=1+L(s)(H(s)−1)L(s)我们可以得到非单位负反馈系统的误差常数为
K
p
=
lim
s
→
0
Z
(
s
)
K_p=\lim_{s\rightarrow0}Z\left(s\right)
Kp=lims→0Z(s),
K
v
=
lim
s
→
0
s
Z
(
s
)
K_v=\lim_{s\rightarrow0}sZ\left(s\right)
Kv=lims→0sZ(s),
K
a
=
lim
s
→
0
s
2
Z
(
s
)
K_a=\lim_{s\rightarrow0}s^2Z\left(s\right)
Ka=lims→0s2Z(s)
(2) 二阶系统性能

T
s
=
4
ζ
ω
n
T_s=\frac4{\zeta\omega_n}
Ts=ζωn4
T
p
=
π
ω
n
1
−
ζ
2
T_p=\frac{\mathrm\pi}{\omega_n\sqrt{1-\zeta^2}}
Tp=ωn1−ζ2π
M
p
t
=
1
+
e
−
ζ
π
1
−
ζ
2
M_{pt}=1+e^\frac{-\zeta\mathrm\pi}{\sqrt{1-\zeta^2}}
Mpt=1+e1−ζ2−ζπ
P
.
O
.
=
100
e
−
ζ
π
1
−
ζ
2
P.O.=100e^\frac{-\zeta\mathrm\pi}{\sqrt{1-\zeta^2}}
P.O.=100e1−ζ2−ζπ
T
r
1
=
2.16
ζ
+
0.60
ω
n
(
0.3
⩽
ζ
⩽
0.8
)
T_{r_1}=\frac{2.16\zeta+0.60}{\omega_n}\left(0.3\leqslant\zeta\leqslant0.8\right)
Tr1=ωn2.16ζ+0.60(0.3⩽ζ⩽0.8)
t
r
=
π
−
a
r
c
c
o
s
ζ
ω
n
1
−
ζ
2
t_r=\frac{\mathrm\pi-\mathrm{arccosζ}}{\omega_n\sqrt{1-\zeta^2}}
tr=ωn1−ζ2π−arccosζ
频域性能指标
谐振峰值
M
r
M_{r}
Mr是频率响应的最大值,它出现在谐振频率
ω
r
\omega_r
ωr处。
带宽
ω
B
\omega_B
ωB定义为在幅频特性曲线上,对数幅值增益从低频值下降3
d
B
dB
dB时所对应的频率。在通常情况下,系统带宽与系统的阶跃响应速度成正比,与调节时间成反比。
剪切频率越大,时间响应越快。
M
r
=
1
2
ζ
1
−
ζ
2
M_r=\frac1{2\zeta\sqrt{1-\zeta^2}}
Mr=2ζ1−ζ21
ω
r
=
ω
n
1
−
2
ζ
2
\omega_r=\omega_n\sqrt{1-2\zeta^2}
ωr=ωn1−2ζ2
ω
b
=
ω
n
1
−
2
ζ
2
+
2
−
4
ζ
2
+
4
ζ
4
\omega_b=\omega_n\sqrt{1-2\zeta^2+\sqrt{2-4\zeta^2+4\zeta^4}}
ωb=ωn1−2ζ2+2−4ζ2+4ζ4
ω
c
=
ω
n
1
+
4
ζ
4
−
2
ζ
2
\omega_c=\omega_n\sqrt{\sqrt{1+4\zeta^4}-2\zeta^2}
ωc=ωn1+4ζ4−2ζ2
γ
=
a
r
c
tan
2
ζ
1
+
4
ζ
4
−
2
ζ
2
\gamma=arc\tan\frac{2\zeta}{\sqrt{\sqrt{1+4\zeta^4}-2\zeta^2}}
γ=arctan1+4ζ4−2ζ22ζ
高阶系统
M
r
=
1
∣
sin
γ
∣
M_r=\frac1{\left|\sin\gamma\right|}
Mr=∣sinγ∣1
σ
=
0.16
+
0.4
(
M
r
−
1
)
,
1
⩽
M
r
⩽
1.8
\sigma=0.16+0.4(M_r-1),\;1\leqslant M_r\leqslant1.8
σ=0.16+0.4(Mr−1),1⩽Mr⩽1.8
t
s
=
K
0
π
ω
c
(
Δ
=
5
%
)
,
K
0
=
2
+
1.5
(
M
r
−
1
)
+
2.5
(
M
r
−
1
)
2
t_s=\frac{K_0\mathrm\pi}{\omega_c}(\Delta=5\%),\;K_0=2+1.5(M_r-1)+2.5{(M_r-1)}^2
ts=ωcK0π(Δ=5%),K0=2+1.5(Mr−1)+2.5(Mr−1)2
(3) 零点和第三个极点对二阶系统响应的影响
3.1 第三个极点
T
(
s
)
=
1
(
s
2
+
0.9
s
+
1
)
(
γ
s
+
1
)
T\left(s\right)=\frac1{\left(s^2+0.9s+1\right)\left(\gamma s+1\right)}
T(s)=(s2+0.9s+1)(γs+1)1

3.2 零点
T
(
s
)
=
(
ω
n
2
a
)
(
s
+
a
)
s
2
+
0.9
ω
n
s
+
ω
n
2
T\left(s\right)=\frac{\left({\displaystyle\frac{\omega_n^2}a}\right)\left(s+a\right)}{s^2+0.9\omega_ns+\omega_n^2}
T(s)=s2+0.9ωns+ωn2(aωn2)(s+a)
(4) *线性系统的简化
原系统
G
H
(
s
)
=
K
a
m
s
m
+
.
.
.
+
a
1
s
+
1
b
n
s
n
+
.
.
.
+
b
1
s
+
1
G_H(s)=K\frac{a_ms^m+...+a_1s+1}{b_ns^n+...+b_1s+1}
GH(s)=Kbnsn+...+b1s+1amsm+...+a1s+1
近似的低阶系统
G
L
(
s
)
=
K
c
p
s
p
+
.
.
.
+
c
1
s
+
1
d
g
s
g
+
.
.
.
+
d
1
s
+
1
G_L(s)=K\frac{c_ps^p+...+c_1s+1}{d_gs^g+...+d_1s+1}
GL(s)=Kdgsg+...+d1s+1cpsp+...+c1s+1
M
2
q
=
Δ
2
q
M_{2q}=\Delta_{2q}
M2q=Δ2q,
q
=
1
,
2
,
.
.
.
q=1,2,...
q=1,2,...其中
M
2
q
=
∑
k
=
0
2
q
(
−
1
)
k
+
q
M
(
k
)
(
0
)
M
(
2
q
−
k
)
(
0
)
k
!
(
2
q
−
k
)
!
M_{2q}=\sum_{k=0}^{2q}\frac{{(-1)}^{k+q}M^{(k)}(0)M^{(2q-k)}(0)}{k!(2q-k)!}
M2q=∑k=02qk!(2q−k)!(−1)k+qM(k)(0)M(2q−k)(0),类似定义
Δ
2
q
\Delta_{2q}
Δ2q
例子见书5.9


原系统:
t
r
=
2.74
s
t_r=2.74s
tr=2.74s,
t
s
=
5
s
t_s=5s
ts=5s

近似系统:
t
r
=
2.75
s
t_r=2.75s
tr=2.75s,
t
s
=
4.82
s
t_s=4.82s
ts=4.82s
课本写的是不太合适的,用欠阻尼系统的近似公式估算一个过阻尼系统。
(四) 劳斯判据
(1) 内容
对特征方程
a
n
s
n
+
a
n
−
1
s
n
−
1
+
⋯
+
a
1
s
+
a
0
=
0
a_ns^n+a_{n-1}s^{n-1}+\cdots+a_1s+a_0=0
ansn+an−1sn−1+⋯+a1s+a0=0,正实部根的个数等于劳斯判定表第一列元素的正负符号的变化次数。

(2) 特殊情况
2.1 首列中出现零元素,所在行存在非零元素
可用 ε \varepsilon ε代替零元素参与计算或用因子 ( s + a ) \left(s+a\right) (s+a)乘以原特征方程
2.2 出现全零行
特征根关于零点对称时会出现这种情况。可用上一行的系数构造辅助方程 F ( s ) = 0 F\left(s\right)=0 F(s)=0,并将方程对s求导,使用所得导数方程的系数。
2.3 虚轴上有重根
如果在虚轴上的共轭根是重根,则系统是不稳定的,而劳斯判据不能发现这种不稳定。
(3) 相对稳定性
(五) 根轨迹
(1) 步骤

(2) 零度根轨迹
(3) 开环零极点影响
增加开环极点,将多一条发散轨迹,该轨迹对原有轨迹有排斥作用,系统稳定性变差。
增加开环零点,将少一条发散轨迹,系统稳定性变好。
(4) 根轨迹簇
研究多个参数对系统的影响。考虑特征方程
s
3
+
3
s
2
+
2
s
+
β
s
+
α
=
0
s^3+3s^2+2s+\beta s+\alpha=0
s3+3s2+2s+βs+α=0。先令
β
=
0
\beta=0
β=0,绘制根轨迹,在所得根轨迹上,找到
α
\alpha
α为特定值时对应的根,然后绘制关于
β
\beta
β的根轨迹。

(六) 频率响应法
(1) 频率响应
系统的频率响应:系统对正弦输入信号的稳态响应。 y ( t ) = A ∣ T ( j ω ) ∣ sin ( ω t + ϕ ) y\left(t\right)=A\left|T\left(j\omega\right)\right|\sin\left(\omega t+\phi\right) y(t)=A∣T(jω)∣sin(ωt+ϕ)
(2) 极坐标图
(3) 波特图
所有零点都在s平面左半平面的传递函数称为最小相位传递函数。
(4) 对数幅相图
(七) 频域稳定性
(1) 奈奎斯特稳定性判据
闭环反馈控制系统稳定的充要条件是 L ( s ) L(s) L(s)在 s s s平面上的映射像围线 τ L \tau_L τL沿逆时针方向包围 ( − 1 , 0 ) (-1,0) (−1,0)点的周数,等于 L ( s ) L(s) L(s)在 s s s右半平面内极点的个数。
(2) 相对稳定性
幅值裕度,相角裕度 ζ = 0.01 γ \zeta=0.01\gamma ζ=0.01γ
(3) 尼科尔斯图
(4) 时延系统
(八) 反馈控制系统设计
(1) 波特图设计超前校正
1.根据稳态误差,确定开环增益
2.计算待校正系统的相角裕度
3.计算所需添加的超前相角,
sin
φ
m
=
a
−
1
a
+
1
\sin\varphi_m=\frac{a-1}{a+1}
sinφm=a+1a−1计算
a
a
a
4.计算
10
l
o
g
a
10loga
10loga,在待校正系统的幅频特性曲线上确定与
−
10
l
o
g
a
d
B
-10logadB
−10logadB对应的频率,即为
ω
c
\omega_c
ωc同时也是
ω
m
\omega_m
ωm
5.计算
p
=
ω
m
a
,
z
=
p
/
a
p=\omega_m\sqrt a,z=p/a
p=ωma,z=p/a,确认相角裕度是否满足,若不满足,则重复
(2) 根轨迹设计超前校正
1.根据系统性能指标,计算主导极点的预期位置
2.绘制待校正系统的根轨迹
3.先将超前校正网络零点直接配置在预期主导极点下方(或在前两个开环极点的左侧近旁)
4.配置超前校正网络的极点,使得在预期主导极点处,满足相角要求
5.在预期主导极点处,确定系统总增益,计算系统稳态误差常数是否满足,若不满足,则重复
(3) 根轨迹设计滞后校正
1.根据系统性能指标,计算主导极点的预期位置
2.绘制待校正系统的根轨迹
3.根据预期主导极点,确定待校正系统的增益,并计算此时的稳态误差常数
4.比较矫正前后的稳态误差常数,计算所需的增益放大倍数,即为校正网络零极点幅值之比,配置零极点在靠近原点的地方

(4) 波特图设计滞后校正
1.根据稳态误差,确定待校正系统增益,绘制波特图
2.计算待校正系统的相角裕度
3.确定能够满足相角裕度要求的穿越频率
ω
c
\omega_c
ωc,可以预留
5
°
5°
5°
4.配置零点应比穿越频率小十倍频程,即
1
b
T
=
0.1
ω
c
′
′
\frac1{bT}=0.1\omega_c''
bT1=0.1ωc′′
5.根据增益
−
20
l
o
g
b
-20logb
−20logb计算参数
b
b
b
(5) 波特图设计超前滞后校正
1.根据稳态误差,确定开环增益
2.绘制波特图,确定
ω
c
\omega_c
ωc,
γ
\gamma
γ,
h
h
h
3.选择斜率从
−
20
-20
−20变为
−
40
-40
−40的频率为超前部分的交接频率
ω
b
\omega_b
ωb
4.根据系统特性要求选取
ω
c
′
\omega_c'
ωc′,
20
l
g
α
=
L
(
ω
c
′
)
+
20
l
g
(
ω
c
′
/
ω
b
)
20lg\alpha=L(\omega_c')+20lg(\omega_c'/\omega_b)
20lgα=L(ωc′)+20lg(ωc′/ωb)得出
α
\alpha
α
5.根据相角裕度估算
ω
a
\omega_a
ωa
6.检验已校正系统的各项性能指标
(5) 根轨迹设计超前滞后校正
1.根轨迹设计超前校正
2.根轨迹设计滞后校正

(6) 最小节拍响应系统设计
最小节拍响应:既能具有最小的超调量,又有快速到达稳态响应的允许波动范围,并且能够持续保持在该波动范围之内的时间响应。

(7) 一些例子
例1

G
c
(
s
)
=
30
s
+
300
s
G_c(s)=\frac{30s+300}{s}
Gc(s)=s30s+300,
G
p
(
s
)
=
10
G_p(s)=10
Gp(s)=10
例2
G
(
s
)
=
40
s
2
(
s
+
40
)
G(s)=\frac{40}{s^2(s+40)}
G(s)=s2(s+40)40,设计合适的校正网络,使得系统足够稳定,超调量在
10
%
10\%
10%到
20
%
20\%
20%之间,调节时间不大于
2
s
2s
2s(按
2
%
标
准
2\%标准
2%标准)

主要是要抵消闭环零点对系统性能指标的影响。
例3
G
(
s
)
=
K
a
3.75
(
s
+
0.15
)
(
0.15
s
+
1
)
G(s)=K_a\frac{3.75}{(s+0.15)(0.15s+1)}
G(s)=Ka(s+0.15)(0.15s+1)3.75,设计合适的
P
I
PI
PI控制器,使得系统稳态误差为零,超调量为
10
%
10\%
10%,调节时间小于
1.5
s
1.5s
1.5s(按
2
%
标
准
2\%标准
2%标准)。若采用超前校正网络,重新完成,并比较结果。


 |  |
|---|---|
| PI | 超前 |
设计
P
I
PI
PI控制器时,答案中如何取到
a
=
0.2
a=0.2
a=0.2的呢?事实上,我们为使得系统的特性与主导极点的特性接近,可以将闭环系统多出的一对零极点设计非常接近。对于
G
c
(
s
)
G
(
s
)
=
25
K
(
s
+
a
)
s
(
s
+
0.15
)
(
s
+
6.67
)
G_c(s)G(s)=\frac{25K(s+a)}{s(s+0.15)(s+6.67)}
Gc(s)G(s)=s(s+0.15)(s+6.67)25K(s+a),其特征方程为
s
3
+
6.82
s
2
+
(
25
K
+
1
)
s
+
25
K
a
=
0
s^3+6.82s^2+(25K+1)s+25Ka=0
s3+6.82s2+(25K+1)s+25Ka=0。令
(
s
+
a
)
(s+a)
(s+a)为该特征方程的一个因式,即
s
=
−
a
s=-a
s=−a为特征方程的解,得
−
a
3
+
6.82
a
2
−
(
25
K
+
1
)
a
+
25
K
a
=
0
-a^3+6.82a^2-(25K+1)a+25Ka=0
−a3+6.82a2−(25K+1)a+25Ka=0,解得
a
=
0.15
a=0.15
a=0.15或
a
=
6.67
a=6.67
a=6.67。注意到
s
3
+
6.82
s
2
+
(
25
K
+
1
)
s
+
25
K
a
=
(
s
+
a
)
(
s
2
+
2
ζ
ω
n
+
w
n
2
)
s^3+6.82s^2+(25K+1)s+25Ka=(s+a)(s^2+2\zeta\omega_n+w_n^2)
s3+6.82s2+(25K+1)s+25Ka=(s+a)(s2+2ζωn+wn2),展开可知
2
ζ
ω
n
+
a
=
6.82
2\zeta\omega_n+a=6.82
2ζωn+a=6.82,我们取
a
=
0.15
a=0.15
a=0.15,进一步可以求得
K
=
1.278
,
ζ
ω
n
=
3.335
K=1.278,\zeta\omega_n=3.335
K=1.278,ζωn=3.335。

例4
G
(
s
)
=
5000
s
(
s
+
20
)
(
s
+
5
)
G(s)=\frac{5000}{s(s+20)(s+5)}
G(s)=s(s+20)(s+5)5000,设计校正网络,使得
K
v
>
40
K_v>40
Kv>40,
ζ
=
0.7
\zeta=0.7
ζ=0.7

注意根轨迹图。

例5


对于开环波特图,对应在
ω
=
6
\omega=6
ω=6时幅值最大
例6
G
(
s
)
=
K
s
(
s
/
2
+
1
)
(
s
/
6
+
1
)
G(s) = \frac{K}{s(s/2+1)(s/6+1)}
G(s)=s(s/2+1)(s/6+1)K,用两个完全相同的一阶超前校正网络串联起来,实现对系统的二阶校正,使得
K
v
=
20
K_v=20
Kv=20,相角裕度为
45
°
45°
45°,闭环带宽大于
4
r
a
d
/
s
4rad/s
4rad/s。

例7
G
(
s
)
=
e
−
s
/
2
G(s)=e^{-s/2}
G(s)=e−s/2,试设计一个合适的
G
c
(
s
)
G_c(s)
Gc(s),使阶跃响应稳态误差小于
2
%
2\%
2%,相角裕度
30
°
30°
30°,计算校正后带宽。

(九) 数字控制系统
(1) 典型结构图

(2) z z z域传递函数
2.1 零阶保持器
G ( s ) = G 0 ( s ) G p ( s ) G(s)=G_0(s)G_p(s) G(s)=G0(s)Gp(s) G ( z ) = Z { G ( s ) } = ( 1 − z − 1 ) Z ( G p ( s ) s ) G(z)=Z\{G(s)\}=(1-z^{-1})Z(\frac{G_p(s)}s) G(z)=Z{G(s)}=(1−z−1)Z(sGp(s))
2.2 串联环节之间有采样开关
D ( z ) = G 1 ( z ) G 2 ( z ) D(z)=G_1(z)G_2(z) D(z)=G1(z)G2(z)
2.3 串联环节之间无采样开关
D ( z ) = G 1 G 2 ( z ) D(z)=G_1G_2(z) D(z)=G1G2(z)
2.4 闭环系统计算
1.选取中间变量,该中间变量为某一采样开关的输出
2.建立等式,化简,消去中间变量
以下图为例,选取
E
1
∗
(
s
)
E_1^*(s)
E1∗(s),
E
1
(
z
)
=
R
G
1
(
z
)
−
E
1
(
z
)
G
2
H
G
1
(
z
)
E_1(z)=RG_1(z)-E_1(z)G2HG1(z)
E1(z)=RG1(z)−E1(z)G2HG1(z),可得,
E
1
(
z
)
=
R
G
1
(
z
)
1
+
G
2
H
G
1
(
z
)
E_1(z)=\frac{RG_1(z)}{1+G_2HG_1(z)}
E1(z)=1+G2HG1(z)RG1(z),代入
C
(
z
)
=
E
1
(
z
)
G
2
(
z
)
C(z)=E_1(z)G_2(z)
C(z)=E1(z)G2(z),即得
C
(
z
)
=
R
G
1
(
z
)
G
2
(
z
)
1
+
G
2
H
G
1
(
z
)
C(z)=\frac{RG_1(z)G_2(z)}{1+G_2HG_1(z)}
C(z)=1+G2HG1(z)RG1(z)G2(z)


2.5 稳态误差
e s s ( ∞ ) = lim z → 1 ( 1 − z − 1 ) E ( z ) e_{ss}(\infty)=\lim_{z\rightarrow1}(1-z^{-1})E(z) ess(∞)=limz→1(1−z−1)E(z)
(3) 稳定性
令 z = w + 1 w − 1 z=\frac{w+1}{w-1} z=w−1w+1,根据劳斯判据判断稳定性
(4) 控制器设计
设计 G c ( s ) = K s + a s + b G_c(s)=K\frac{s+a}{s+b} Gc(s)=Ks+bs+a,转换成 D ( z ) = C z − A z − B D(z)=C\frac{z-A}{z-B} D(z)=Cz−Bz−A, A = e − a T B = e − b T C 1 − A 1 − B = K a b A=e^{-aT}\;B=e^{-bT}\;C\frac{1-A}{1-B}=K\frac ab A=e−aTB=e−bTC1−B1−A=Kba
(5) P I D PID PID数字控制器的实现
在
s
s
s域中,
U
(
s
)
X
(
s
)
=
G
c
(
s
)
=
K
p
s
+
K
I
s
+
K
D
s
\frac{U(s)}{X(s)}=G_c(s)=K_ps+\frac{K_I}{s}+K_Ds
X(s)U(s)=Gc(s)=Kps+sKI+KDs,求对应的离散
P
I
D
PID
PID控制器
对于微分,
u
(
k
T
)
=
1
T
(
x
(
k
T
)
−
x
(
(
k
−
1
)
T
)
)
u(kT)=\frac{1}{T}(x(kT)-x((k-1)T))
u(kT)=T1(x(kT)−x((k−1)T)),
U
(
z
)
=
1
−
z
−
1
T
X
(
z
)
=
z
−
1
T
z
X
(
z
)
U(z)=\frac{1-z^{-1}}{T}X(z)=\frac{z-1}{Tz}X(z)
U(z)=T1−z−1X(z)=Tzz−1X(z)
对于积分,
u
(
k
T
)
=
u
(
(
k
−
1
)
T
)
+
T
x
(
k
T
)
u(kT)=u((k-1)T)+Tx(kT)
u(kT)=u((k−1)T)+Tx(kT),
U
(
z
)
=
z
−
1
U
(
z
)
+
T
X
(
z
)
U(z)=z^{-1}U(z)+TX(z)
U(z)=z−1U(z)+TX(z),
U
(
z
)
X
(
z
)
=
T
z
z
−
1
\frac{U(z)}{X(z)}=\frac{Tz}{z-1}
X(z)U(z)=z−1Tz
从而,
G
c
(
z
)
=
K
P
+
K
I
T
z
z
−
1
+
K
D
z
−
1
T
z
G_c(z)=K_P+\frac{K_ITz}{z-1}+K_D\frac{z-1}{Tz}
Gc(z)=KP+z−1KITz+KDTzz−1
(十) 线性系统的状态空间分析与综合
(1) 标准型
(2) 可控性、可观性
(3) 极点配置、状态观测器
(4) 离散时间系统
G ( T ) = e A T G(T)=e^{AT} G(T)=eAT H ( T ) = ( ∫ 0 T e A λ d λ ) B H(T)=(\int_0^Te^{A\lambda}\operatorname d\lambda)B H(T)=(∫0TeAλdλ)B
(十一) 非线性系统
(1) 非线性系统概述
1.1 典型非线性环节
继电特性 产生振荡
死区特性 存在稳态误差
饱和特性
间隙特性
1.2 非线性系统的特点
多孤立平衡点
极限环、自激振荡
混沌
分岔
不仅含有同频率,还含有高次谐波分量
有限逃逸时间
(2) 描述函数法
2.1 应用条件
非线性系统的结构图可简化成一个非线性环节
N
N
N和一个线性部分
G
(
s
)
G(s)
G(s)串联的闭环结构。(本身具有或者能通过转换)
N
(
A
)
N(A)
N(A)奇对称,基波幅值占优。
非线性 时不变。
系统的线性部分具有良好的低通滤波特性。
2.2 描述函数
N
(
X
,
ω
)
=
B
1
+
j
A
1
X
N(X,\omega)=\frac{B_1+jA_1}{X}
N(X,ω)=XB1+jA1

2.3 非线性特性的串并联
2.4 稳定性分析
a.若
G
(
j
ω
)
G(j\omega)
G(jω)不包围
−
1
N
-\frac{1}{N}
−N1
⇒
\Rightarrow
⇒稳定
b.若
G
(
j
ω
)
G(j\omega)
G(jω)与
−
1
N
相
交
-\frac{1}{N}相交
−N1相交
⇒
\Rightarrow
⇒临界稳定
进一步,分析极限环的稳定性
c.若
G
(
j
ω
)
G(j\omega)
G(jω)包围
−
1
N
-\frac{1}{N}
−N1
⇒
\Rightarrow
⇒不稳定
2.5 极限环分析
−
1
N
(
A
)
-\frac{1}{N(A)}
−N(A)1与
G
p
(
s
)
G_p(s)
Gp(s)实部、虚部分别相等
例:分析
x
¨
+
x
˙
=
{
1
,
x
˙
−
x
>
0
−
1
,
x
˙
−
x
<
0
\ddot x+\dot x=\left\{\begin{array}{l}1,\dot x-x>0\\-1,\dot x-x<0\end{array}\right.
x¨+x˙={1,x˙−x>0−1,x˙−x<0系统的极限环
先把系统表示成分线性部分和线性部分,进一步再分析(结果
X
=
2
2
π
X=\frac{2\sqrt2}{\pi}
X=π22)
2.6 描述函数法的准确性
当
−
1
N
(
A
)
-\frac{1}{N(A)}
−N(A)1与
G
p
(
s
)
G_p(s)
Gp(s)越接近垂直时,得到的结果越准确
描述函数法对于正弦输入的准确性更高
描述函数法的难度和准确性只取决于非线性部分
(3) 相平面法
3.1 相轨迹
x
¨
+
f
(
x
,
x
˙
)
=
0
⇒
d
x
˙
d
x
=
−
f
(
x
,
x
˙
)
x
˙
\ddot x+f(x,\dot x)=0\Rightarrow\frac{d\dot x}{dx}=\frac{-f(x,\dot x)}{\dot x}
x¨+f(x,x˙)=0⇒dxdx˙=x˙−f(x,x˙)
相轨迹的绘制:解析法、等倾线法
3.2 二阶线性系统的相轨迹
焦点 节点 中心点 鞍点
3.3 奇点
(4) 李雅普诺夫稳定性
4.1 定义
对于平衡点
x
=
0
x=\mathbf0
x=0,我们有:
李雅普诺夫稳定:
∀
R
>
0
,
∃
r
>
0
,
∥
x
(
0
)
∥
<
r
⇒
∀
t
≥
0
,
∥
x
(
t
)
∥
<
R
\forall R>0,\exists r>0,\left\|x(0)\right\|<r\Rightarrow\forall t\geq0,\left\|x(t)\right\|<R
∀R>0,∃r>0,∥x(0)∥<r⇒∀t≥0,∥x(t)∥<R
渐近稳定:李雅普诺夫稳定,且
∃
r
>
0
,
∥
x
(
0
)
∥
<
r
⇒
lim
t
→
∞
x
(
t
)
=
0
\exists r>0,\left\|x(0)\right\|<r\Rightarrow\lim_{t\rightarrow\infty}x(t)=\mathbf0
∃r>0,∥x(0)∥<r⇒limt→∞x(t)=0
指数稳定:
∃
α
>
0
,
λ
>
0
,
∀
t
>
0
,
∥
x
(
t
)
∥
⩽
α
∥
x
(
0
)
∥
e
−
λ
t
\exists\alpha>0,\lambda>0,\forall t>0,\left\|x(t)\right\|\leqslant\alpha\left\|x(0)\right\|e^{-\lambda t}
∃α>0,λ>0,∀t>0,∥x(t)∥⩽α∥x(0)∥e−λt
如果对于任意的初始状态,渐进稳定或指数稳定的条件成立,那么我们称为全局渐近稳定或全局指数稳定。
4.2 李雅普诺夫线性化方法
李雅普诺夫第一方法、间接法
4.3 李雅普诺夫直接法
李雅普诺夫第二方法
系统的李雅普诺夫函数:
V
(
x
)
>
0
,
V
˙
(
x
)
⩽
0
V(x)>0,\dot V(x)\leqslant0
V(x)>0,V˙(x)⩽0
(十二) 一些tips
1.

答案所给的框图中的积分环节应该缺少了一个系数。
分析整个系统时,可以从偏差信号开始。
2.为使用奈氏判据等判断系统稳定性时,我们可以将传递函数转化成一些更容易操作的函数。(保证闭环特征方程不变)
3. 传递函数的约分 不约分
4. 如
x
3
x^3
x3,求描述函数时,可以直接算输出并取基次谐波,除以输入。
5.中频段以
−
20
d
B
/
d
e
c
-20dB/dec
−20dB/dec穿越
0
d
B
0dB
0dB线,稳定 但若
−
60
d
B
/
d
e
c
-60dB/dec
−60dB/dec转到
−
20
d
B
/
d
e
c
-20dB/dec
−20dB/dec也不稳定。
6.
P
D
PD
PD控制器产生有效的早期修正信号,增加系统的阻尼程度,提高系统的响应速度,提高系统的稳定性。但会放大高频信号,系统抗干扰能力减弱。
P
I
PI
PI控制器提高系统的型别,提高系统的精度,系统跟踪能力增强,系统的稳定性下降。
7.系统的脉冲响应反映了系统的静特性,系统的动特性可以用正弦信号响应来反映。
8.考虑稳态误差前,先判断稳定性。
9.一道有一定计算的题目
设单位负反馈系统的开环传递函数为
G
(
s
)
=
ω
n
2
s
(
s
+
2
ζ
ω
n
)
G(s)=\frac{{\omega_n}^2}{s(s+2\zeta\omega_n)}
G(s)=s(s+2ζωn)ωn2,已知闭环频率特性的模
∣
ϕ
(
j
2
)
∣
=
1
2
ζ
|\phi(j2)|=\frac{1}{2\zeta}
∣ϕ(j2)∣=2ζ1,相角裕度为
γ
=
26.56
°
\gamma=26.56°
γ=26.56°。试求输入
r
(
t
)
=
3
s
i
n
4
t
r(t)=3sin 4t
r(t)=3sin4t时,系统的稳态输出。
答案:
ω
n
=
2
\omega_n=2
ωn=2,
ζ
=
0.236
\zeta=0.236
ζ=0.236,
c
∞
(
t
)
=
0.954
s
i
n
(
4
t
−
162.5
°
)
c_∞(t)=0.954sin(4t-162.5°)
c∞(t)=0.954sin(4t−162.5°)
10.闭环实数零极点。零点减小系统阻尼,峰值时间提前,超调量增大;极点增大系统阻尼,峰值时间滞后,超调量减小。
11.线性定常系统的李雅普诺夫稳定性分析
A
T
P
+
P
A
=
−
Q
A^TP+PA=-Q
ATP+PA=−Q,
G
T
P
G
−
P
=
−
Q
G^TPG-P=-Q
GTPG−P=−Q
12.增加实极点,调节时间的变化不确定。如本文3.1。绝对值越小,超调减少越明显。
13.如果考试用计算器算时,注意一下弧度制、角度制。
14.PID定性影响
15.求稳态误差前,先判断稳定性

16.1个根轨迹
17.波特图通过实际值确定传递函数
0
<
ζ
<
2
2
,
M
r
=
1
2
ζ
1
−
ζ
2
0<\zeta<\frac{\sqrt2}{2},M_r=\frac{1}{2\zeta\sqrt{1-\zeta^2}}
0<ζ<22,Mr=2ζ1−ζ21
2
2
<
ζ
<
1
,
M
r
=
2
ζ
1
−
ζ
2
\frac{\sqrt2}{2}<\zeta<1,M_r=2\zeta\sqrt{1-\zeta^2}
22<ζ<1,Mr=2ζ1−ζ2
ω
r
=
ω
n
1
−
2
ζ
2
\omega_r=\omega_n\sqrt{1-2\zeta^2}
ωr=ωn1−2ζ2
18.对于二阶系统来说,增加开环零点,会增大系统阻尼。对于高阶系统,可能减小系统阻尼。
19.低频段决定了系统的稳态性能,中频段决定了系统的动态性能,高频段决定了系统的抗扰性能















 2753
2753











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









