






图像坐标轴: u、v
图像物理坐标:x、y、z
摄像机坐标:Xc、Yc、Zc
世界坐标系:Xw、Yw、Zw
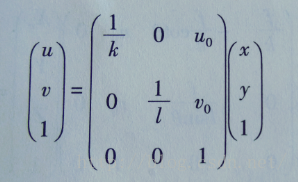
》由于图像坐标系是以像素为单位的,是数字量,而后期处理需要的是物理坐标系,因
此需要把图像坐标系与图像物理坐标系对应起来,图像坐标系与图像物理坐标系关系:
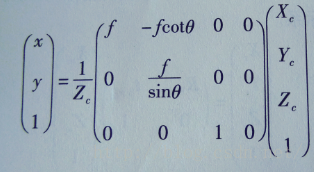
》图像物理坐标系与摄像机坐标系的关系:
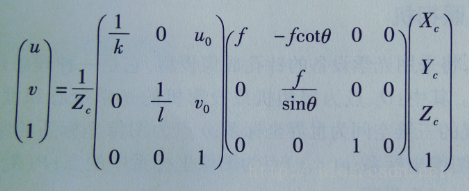
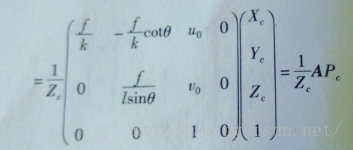
(k、l、u。、v。、f、θ) 位摄像机 的内参数
》摄像机坐标系与世界坐标系的关系
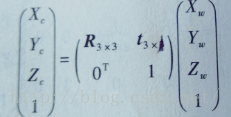
(R3x3是旋转矩阵、t3x1是平移矩阵)

图像坐标轴: u、v
图像物理坐标:x、y、z
摄像机坐标:Xc、Yc、Zc
世界坐标系:Xw、Yw、Zw
》由于图像坐标系是以像素为单位的,是数字量,而后期处理需要的是物理坐标系,因
此需要把图像坐标系与图像物理坐标系对应起来,图像坐标系与图像物理坐标系关系:
》图像物理坐标系与摄像机坐标系的关系:
(k、l、u。、v。、f、θ) 位摄像机 的内参数
》摄像机坐标系与世界坐标系的关系
(R3x3是旋转矩阵、t3x1是平移矩阵)
 2688
1711
2688
1711

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























