







KinectFusion中用到的TSDF Fusion
最近在看关于稠密三维重建的相关算法,看到了KinectFusion,KinectFusion是微软研究院研发的基于Kinect实现的稠密三维重建项目。采用GPU加速的KinectFusion可以实时的实现稠密三维重建。流程步骤如下图所示:
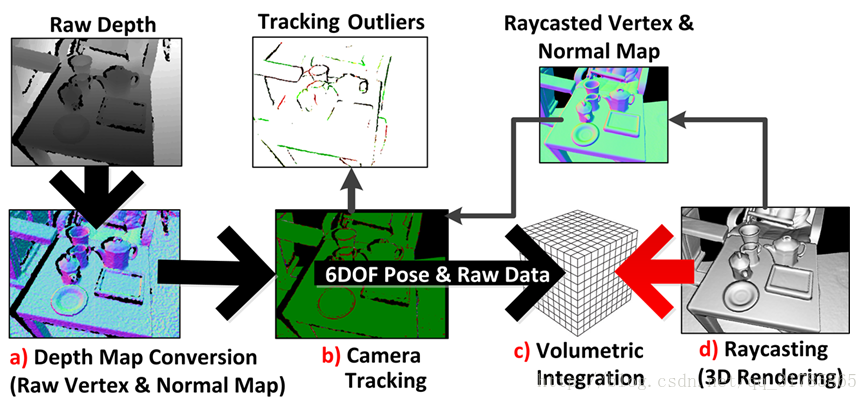
- Depth Map Conversion:读入的深度图像转换为三维点云,计算每一个点云的法向量;
- Camera Tracking(map-to-frame):通过上一次对map中点云对上一帧的投影,用ICP对当前帧进行匹配求解位姿;
- Volumetric Integration:根据步骤2的位姿,将当前帧的点云融合到网格模型中去,这里用了TSDF;
Raycasting :根据当前帧相机位姿将模型中的点云投影到当前帧并且计算其法向量,用来在步骤2中对下一帧的输入图像配准。
这里重点学习了一下TSDF
T
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1239
1239

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









