








 超级会员免费看
超级会员免费看

 这篇博客介绍了如何利用解析法对点云数据进行圆形参数拟合,包括不含噪声和含噪声的情况。通过C++和PCL实现,实验结果显示即使在有噪声的情况下也能得到接近实际的圆心坐标和半径,验证了算法的准确性。
这篇博客介绍了如何利用解析法对点云数据进行圆形参数拟合,包括不含噪声和含噪声的情况。通过C++和PCL实现,实验结果显示即使在有噪声的情况下也能得到接近实际的圆心坐标和半径,验证了算法的准确性。
 |
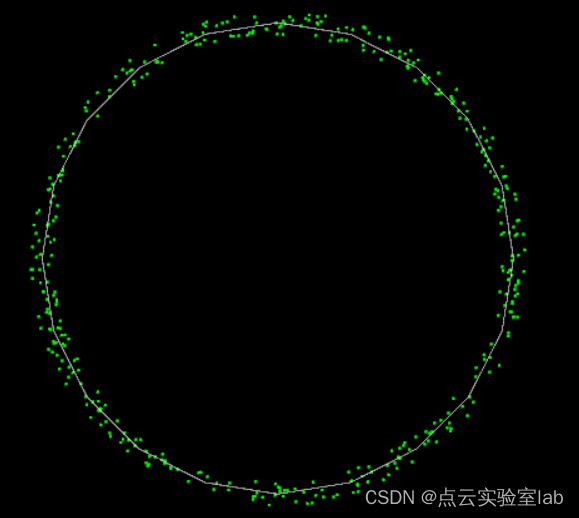 |
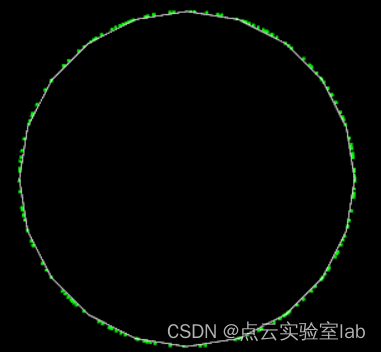
| 理想离散点拟合圆结果 | 离散点比较大拟合圆结果 |
1、背景介绍
实际上,很多人工构造物的形状满足一定的几何结构,其中圆形是作为常见一类。那么获取该类目标的点云数据便是位于一个圆上的点云数据。如下图所示,其形状为圆形,对应的点云数据,为位于一个。在三维重建过程中,需要根据散乱点云
|
|
| 理想离散点拟合圆结果 | 离散点比较大拟合圆结果 |
实际上,很多人工构造物的形状满足一定的几何结构,其中圆形是作为常见一类。那么获取该类目标的点云数据便是位于一个圆上的点云数据。如下图所示,其形状为圆形,对应的点云数据,为位于一个。在三维重建过程中,需要根据散乱点云
 3418
3418

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























