







硬件设备介绍
使用的硬件设备:HTC VIVE 或 HTC VIVE Pro
1.认识一下HTC VIVE VR头盔上的主要部件:

A 是基站(定位器) x 2(发射激光定位头显与手柄控制器)
B 是同步线
C 是基站电源适配器 x2(任何电子设备都需要能源支持)
E 是联接器(把头显和电脑连起来就靠它了)
F 是联接器专用贴片(你可以把连接器粘在主机箱之类地方固定住)
G是联接器电源适配器(同C)
N 是头显
O 是手柄控制器 x 2
至于HTC VIVE Pro,在这里也不详细谈了,可以参照说明书查看各个组件以及安装方法,和HTC Vive一样很好安装!
2.先安装定位器我们通常称为基站,基站有120°的可视范围,所以玩家需要将两个基站的搭设在对角线两边的高处以便于基站能够扫描到游戏空间范围并且相互间没有阻隔。
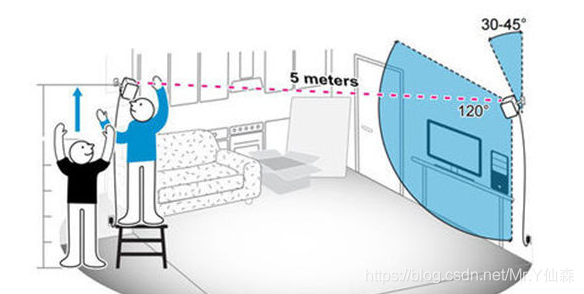
基站后端的接口在使用时只需要连接电源,其余的接口只在需要更新或是同步出现问题是连接处理使用。
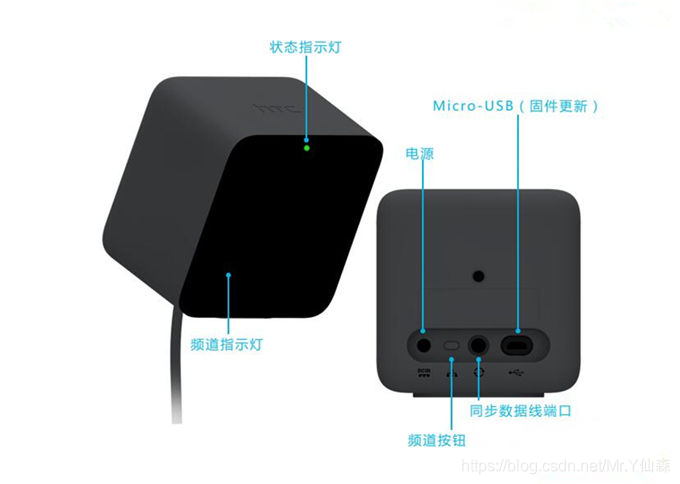
安装完毕后接上电源,看到指示灯亮起绿色的光并且常亮就表示基站已经在正常工作

3.接下来是串流盒的连接,这个步骤其实很简单。
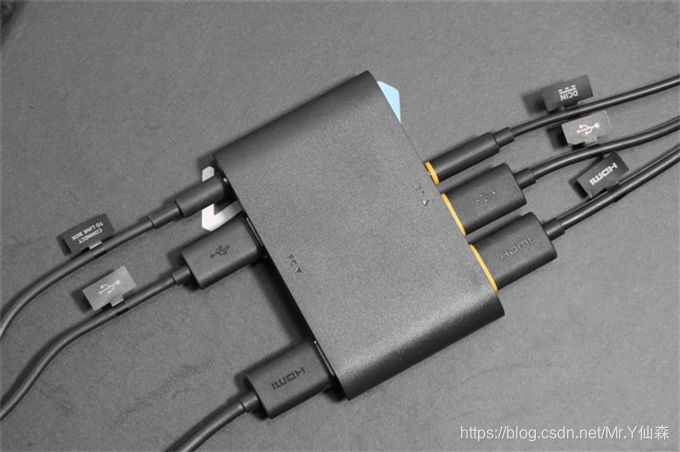
你只要把附带的USB数据线、HDMI连接线以及电源线插在串流盒上相对应的接口处,另一端连接电脑主机上对应的接口便可。
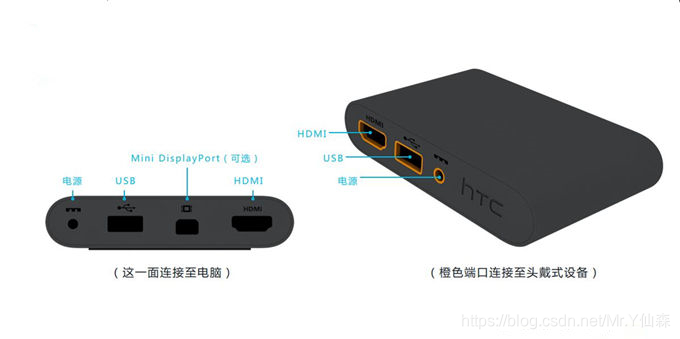
4.最后串流盒另一头有三个橙色的接口是用来连接头盔上的三合一数据线的,同样的把线头接在对应的接口上电脑就会开始自动安装驱动了。(HTC VIVE Pro 有些不一样,具体请参照说明书指导安装)
5.HTC的手柄是无线配置的,所以装好系统之后按下手柄最下方的按键
听到“嘀”声就成功开启手柄了,上方的指示灯常亮表示手柄正在运行。

6.接下来的步骤:
⑴. 下载安装好Steam,之后安装steam VR,运行后找到‘设置房间’打开
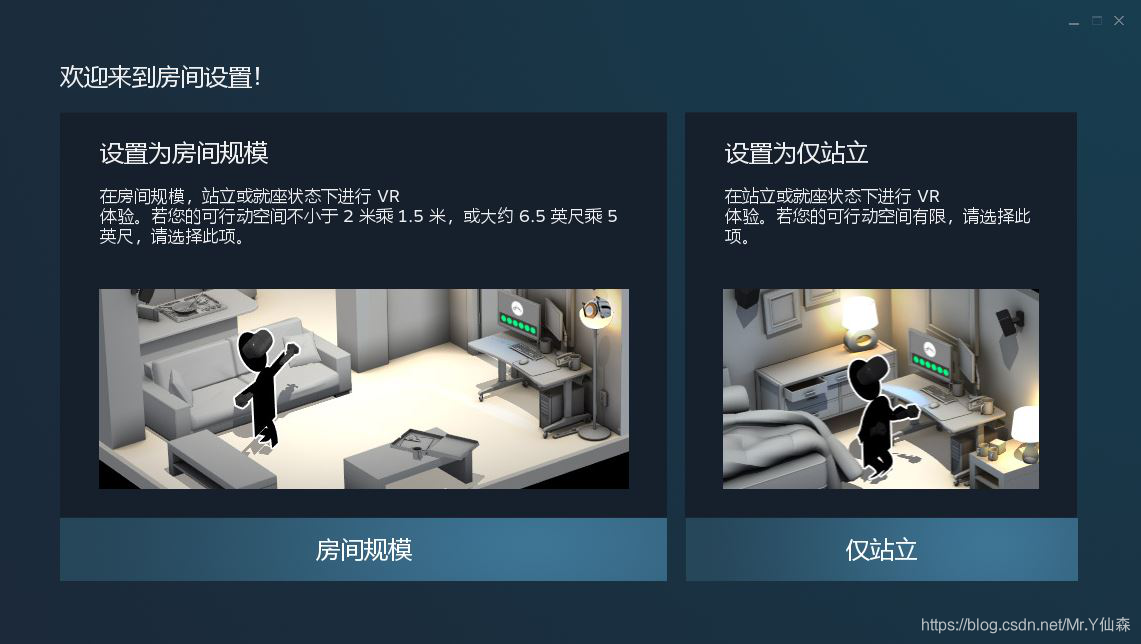
⑵. 弹出来的窗口,根据自己的需求而设置房间
⑶. 之后的步骤按照SteamVR里面的提示进行定位(这里就不详细介绍了)
⑷. 如果定位有点偏差或者不满意,可以重复定位。
(仅仅是第一次使用才需要定位,以后使用时,只要不移动定位器,就无须重新定位)
7.定位好了之后,就能够正常运行VR头盔了!!
后续会有更多的开发,谢谢大家的支持~~
(部分图片来源于网络素材)


















 822
822

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











