







#图示
一、连杆坐标系的建立
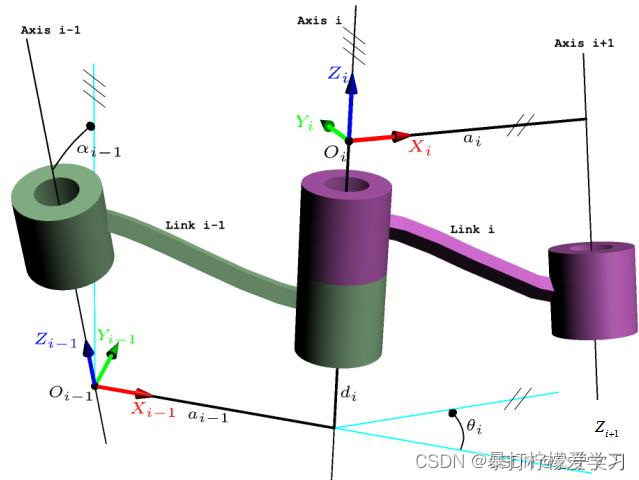
连杆坐标系是与机器人各连杆固连的坐标系,这是由Danevit Harttnberg提出的故称为DH方法。对于n自由度机器人,建立与各杆件固连的坐标系的步骤为:
第一步:确定各坐标系的Z轴:
基本原则为:选取轴为关节i+1的轴向(指向可以任选,但是通常将各平行的Z轴的指向取为相同)。另外,机器人远端没有关节n+1,这时可以选取轴和轴重合 。
第二步:确定各坐标系的原点:
基本原则为:选取原点在过轴和轴的公法线上(即公法线与轴的交点)。注意:①当 轴和轴平行时,两轴的公法线有无数条,若两轴重合则取,若两轴平行且不重合则过点做两轴的公法线,此公法线与轴的交点即为。②由于没有,故的无法按上面的方法确定,若与相交则,若与不相交取在与的公法线上。
第三步:确定各坐标系的X轴:
基本原则为:选取轴沿过 轴和 轴的公法线,方向从 轴指向轴。 注意:①当 轴与轴 重合时(这时),选取 轴满足在初始位置时 轴与轴重合。②当 轴与轴相交且不重合时,选择=。通常使所有平行的X轴有相同的指向。③当i=0时,由于或 在与的公法线上,选取在初始位置时轴与轴重合。
第四步:确定各坐标系的Y轴:
基本原则为:使构成右手坐标系。
二、DH参数含义:
1、杆件长度:定义为从轴到 轴的距离,沿 轴的指向为正;
2、杆件扭角:定义为从轴到 轴的转角,绕 轴正向转动为正,且;
3、关节距离:定义为从轴到轴的距离,沿轴的指向为正;
4、关节扭角:定义为从轴到轴的转角,绕轴正向转动为正,且;
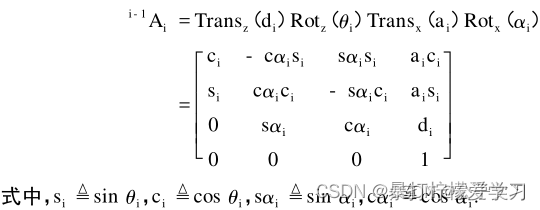
三、坐标系间的齐次变换矩阵
:
















 7407
7407











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









