







配置微软Azure Kinect DK 录制器k4arecorder
https://docs.microsoft.com/zh-cn/azure/kinect-dk/build-first-app
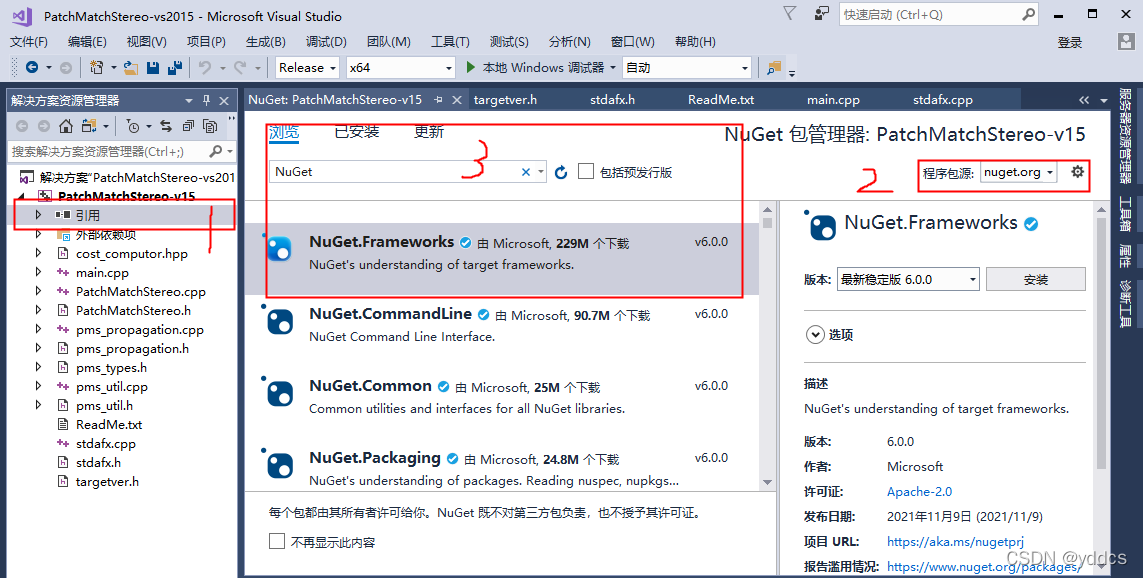
1.新建解决方案添加Azure Kinect NuGet 包
添加该包,可以使用程序包管理器 UI:右键单击“引用”,然后从解决方案资源管理器中选择“管理 NuGet 包”。
选择nuget.org 作为包源,选择“浏览”选项卡,然后搜索 。
从列表中选择该包并安装。
2. 使用Kinect录制
k4arecorder [options] output.mkv
Options:
-h, --help Prints this help
--list List the currently connected K4A devices
--device Specify the device index to use (default: 0)
-l, --record-length Limit the recording to N seconds (default: infinite)
-c, --color-mode Set the color sensor mode (default: 1080p), Available options:
3072p, 2160p, 1536p, 1440p, 1080p, 720p, 720p_NV12, 720p_YUY2, OFF
-d, --depth-mode Set the depth sensor mode (default: NFOV_UNBINNED), Available options:
NFOV_2X2BINNED, NFOV_UNBINNED, WFOV_2X2BINNED, WFOV_UNBINNED, PASSIVE_IR, OFF
--depth-delay Set the time offset between color and depth frames in microseconds (default: 0)
A negative value means depth frames will arrive before color frames.
The delay must be less than 1 frame period.
-r, --rate Set the camera frame rate in Frames per Second
Default is the maximum rate supported by the camera modes.
Available options: 30, 15, 5
--imu Set the IMU recording mode (ON, OFF, default: ON)
--external-sync Set the external sync mode (Master, Subordinate, Standalone default: Standalone)
--sync-delay Set the external sync delay off the master camera in microseconds (default: 0)
This setting is only valid if the camera is in Subordinate mode.
-e, --exposure-control Set manual exposure value (-11 to 1) for the RGB camera (default: auto exposure)
set filename="test"
k4arecorder.exe -c OFF --imu OFF %filename%_nfov.mkv
k4arecorder.exe -c OFF -d WFOV_UNBINNED --imu OFF %filename%_wfov.mkv
3. python进行录制
https://github.com/ibaiGorordo/pyKinectAzure



















 464
464

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











