









 本文介绍了Kalman滤波器的基本原理和应用,通过Python代码示例展示了如何使用Kalman滤波器估计移动物体的位置和速度。代码运行结果以图像形式显示了估计效果,证实了Kalman滤波器在考虑噪声影响下能提供稳定准确的估计。
本文介绍了Kalman滤波器的基本原理和应用,通过Python代码示例展示了如何使用Kalman滤波器估计移动物体的位置和速度。代码运行结果以图像形式显示了估计效果,证实了Kalman滤波器在考虑噪声影响下能提供稳定准确的估计。
CSDN@_养乐多_
Kalman滤波器是一种经典的估计方法,广泛应用于估计系统状态的问题。本篇博客将介绍Kalman滤波器的基本原理,并通过一个简单的Python代码示例,演示如何使用Kalman滤波器来估计移动物体的位置。
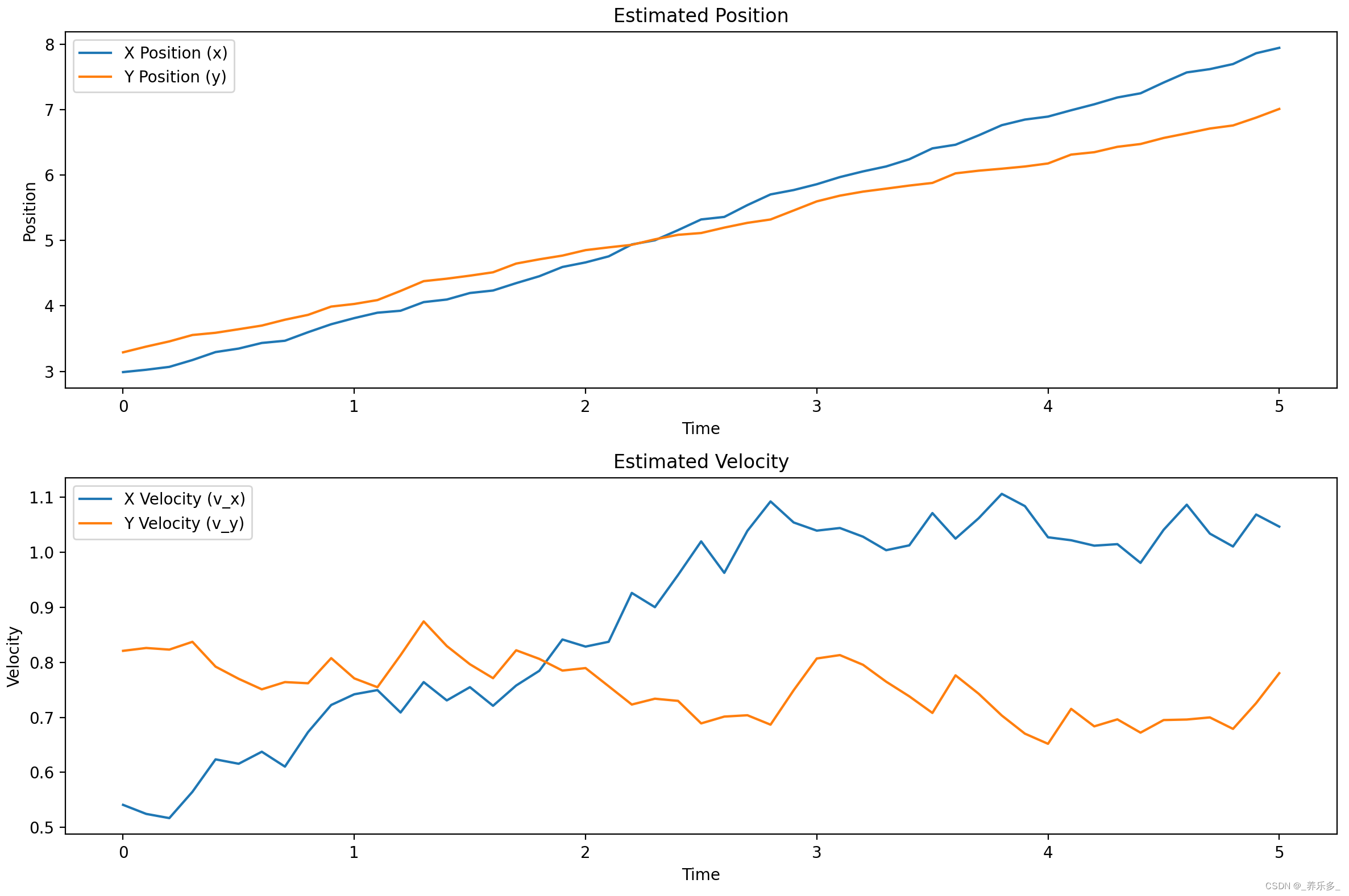
通过运行代码,我们将得到一个包含两个子图的图像,分别展示了估计的位置和速度随时间的变化情况。从图像中可以看出,Kalman滤波器能够很好地估计移动物体的位置和速度,同时考虑了测量噪声和过程噪声的影响,使得估计结果更加稳定和准确。
一、Kalman滤波器简介
Kalman滤波器是一种递归估计滤波算法,用于估计线性动态系统的状态。它结合了测量值和状态模型,并通过递归的方式进行状态估计。Kalman滤波器的核心思想是使用先验估计和测量更新,以最优的方式估计系统的状态,并考虑到过程噪声和测量噪声。
二、Kalman滤波器原理
Kalman滤波器可以分为两个主要步骤:预测步骤和更新步骤。预测步骤用于预测下一个时刻的状态和协方差,更新步骤用于根据测量值来更新状态和协方差。预测步骤使用系统的状态转移矩阵和过程噪声协方差来估计下一时刻的状态和协方差。更新步骤使用测量模型和测量噪声协方差来根据实际测量值更新状态和协方差。
三、代码示例
本文将通过一个简单的Python代码示例来演示Kalman滤波器的应用。代码使用NumPy库来进行矩阵运算,并使用Matplotlib库来绘制状态随时间的变化曲线。代码模拟了一个移动物体的位置估计过程,通过不断更新测量值,最终得到估计的位置和速度信息。
from numpy import dot, sum, tile, linalg, exp, log, pi
from numpy.linalg import inv
from numpy import *
from numpy.random import randn
def kf_predict(X, P, A, Q, B, U):
X = dot(A, X) + dot(B, U) # 预测下一个状态
P = dot(A, dot(P, A.T)) + Q # 更新协方差
return (X, P)
def kf_update(X, P, Y, H, R):
IM = dot(H, X) # 预测测量值
IS = R + dot(H, dot(P, H.T)) # 预测测量误差协方差
K = dot(P, dot(H.T, inv(IS))) # 计算卡尔曼增益
X = X + dot(K, (Y - IM)) # 更新状态
P = P - dot(K, dot(IS, K.T)) # 更新协方差
LH = gauss_pdf(Y, IM, IS) # 计算测量值的概率密度函数值
return (X, P, K, IM, IS, LH)
def gauss_pdf(X, M, S):
if M.shape[1] == 1:
DX = X - tile(M, X.shape[1])
E = 0.5 * sum(DX * (dot(inv(S), DX)), axis=0)
E = E + 0.5 * M.shape[0] * log(2 * pi) + 0.5 * log(linalg.det(S))
P = exp(-E)
elif X.shape()[1] == 1:
DX = tile(X, M.shape()[1]) - M
E = 0.5 * sum(DX * (dot(inv(S), DX)), axis=0)
E = E + 0.5 * M.shape()[0] * log(2 * pi) + 0.5 * log(linalg.det(S))
P = exp(-E)
else:
DX = X - M
E = 0.5 * dot(DX.T, dot(inv(S), DX))
E = E + 0.5 * M.shape()[0] * log(2 * pi) + 0.5 * log(linalg.det(S))
P = exp(-E)
return (P[0], E[0])
#time step of mobile movement
dt = 0.1 # 移动的时间步长
X = array([[0.0], [0.0], [0.1], [0.1]]) # 初始状态向量
P = diag((0.01, 0.01, 0.01, 0.01)) # 初始状态协方差矩阵
A = array([[1, 0, dt, 0], [0, 1, 0, dt], [0, 0, 1, 0], [0, 0, 0, 1]]) # 状态转移矩阵
Q = eye(X.shape[0]) # 状态过程噪声协方差矩阵
B = eye(X.shape[0]) # 控制输入矩阵
U = zeros((X.shape[0], 1)) # 控制输入向量
Y = array([[X[0, 0] + abs(randn(1)[0])], [X[1, 0] + abs(randn(1)[0])]]) # 测量值向量
H = array([[1, 0, 0, 0], [0, 1, 0, 0]]) # 测量矩阵
R = eye(Y.shape[0]) # 测量噪声协方差矩阵
N_iter = 50 # Kalman滤波器的迭代次数
# Applying the Kalman Filter
for i in arange(0, N_iter):
(X, P) = kf_predict(X, P, A, Q, B, U)
(X, P, K, IM, IS, LH) = kf_update(X, P, Y, H, R)
Y = array([[X[0, 0] + abs(0.1 * randn(1)[0])], [X[1, 0] + abs(0.1 * randn(1)[0])]]) # 更新测量值
print("Final estimated state:")
print(X)
import matplotlib.pyplot as plt
# 初始化状态向量列表和时间步长列表
X_estimated = [X] # 初始状态
time_steps = [0]
# Applying the Kalman Filter
for i in range(1, N_iter + 1):
(X, P) = kf_predict(X, P, A, Q, B, U)
(X, P, K, IM, IS, LH) = kf_update(X, P, Y, H, R)
Y = array([[X[0, 0] + abs(0.1 * randn(1)[0])], [X[1, 0] + abs(0.1 * randn(1)[0])]]) # 更新测量值
# 将估计的状态向量和时间步长保存在列表中
X_estimated.append(X)
time_steps.append(i * dt)
# 提取各个状态维度的变化值
X_estimated = array(X_estimated).squeeze()
X_pos_x = X_estimated[:, 0]
X_pos_y = X_estimated[:, 1]
X_vel_x = X_estimated[:, 2]
X_vel_y = X_estimated[:, 3]
# 绘制状态随时间的变化曲线
plt.figure(figsize=(12, 8))
plt.subplot(2, 1, 1)
plt.plot(time_steps, X_pos_x, label='X Position (x)')
plt.plot(time_steps, X_pos_y, label='Y Position (y)')
plt.title('Estimated Position')
plt.xlabel('Time')
plt.ylabel('Position')
plt.legend()
plt.subplot(2, 1, 2)
plt.plot(time_steps, X_vel_x, label='X Velocity (v_x)')
plt.plot(time_steps, X_vel_y, label='Y Velocity (v_y)')
plt.title('Estimated Velocity')
plt.xlabel('Time')
plt.ylabel('Velocity')
plt.legend()
plt.tight_layout()
plt.show()
四、代码详解
这段代码实现了一个基本的卡尔曼滤波器(Kalman Filter)用于估计移动物体的位置。以下是代码的中文解释:
导入所需的库和函数:
from numpy import dot, sum, tile, linalg, exp, log, pi
from numpy.linalg import inv
定义kf_predict函数,用于预测下一个时刻的状态和协方差:
def kf_predict(X, P, A, Q, B, U):
X = dot(A, X) + dot(B, U) # 预测下一个状态
P = dot(A, dot(P, A.T)) + Q # 更新协方差
return (X, P)
定义kf_update函数,用于根据测量值更新状态和协方差:
def kf_update(X, P, Y, H, R):
IM = dot(H, X) # 预测测量值
IS = R + dot(H, dot(P, H.T)) # 预测测量误差协方差
K = dot(P, dot(H.T, inv(IS))) # 计算卡尔曼增益
X = X + dot(K, (Y - IM)) # 更新状态
P = P - dot(K, dot(IS, K.T)) # 更新协方差
LH = gauss_pdf(Y, IM, IS) # 计算测量值的概率密度函数值
return (X, P, K, IM, IS, LH)
定义gauss_pdf函数,用于计算高斯分布的概率密度函数值:
def gauss_pdf(X, M, S):
if M.shape[1] == 1:
DX = X - tile(M, X.shape()[1])
E = 0.5 * sum(DX * (dot(inv(S), DX)), axis=0)
E = E + 0.5 * M.shape()[0] * log(2 * pi) + 0.5 * log(linalg.det(S))
P = exp(-E)
elif X.shape()[1] == 1:
DX = tile(X, M.shape()[1]) - M
E = 0.5 * sum(DX * (dot(inv(S), DX)), axis=0)
E = E + 0.5 * M.shape()[0] * log(2 * pi) + 0.5 * log(linalg.det(S))
P = exp(-E)
else:
DX = X - M
E = 0.5 * dot(DX.T, dot(inv(S), DX))
E = E + 0.5 * M.shape()[0] * log(2 * pi) + 0.5 * log(linalg.det(S))
P = exp(-E)
return (P[0], E[0])
初始化所需的变量:
dt = 0.1 # 移动的时间步长
X = array([[0.0], [0.0], [0.1], [0.1]]) # 初始状态向量
P = diag((0.01, 0.01, 0.01, 0.01)) # 初始状态协方差矩阵
A = array([[1, 0, dt, 0], [0, 1, 0, dt], [0, 0, 1, 0], [0, 0, 0, 1]]) # 状态转移矩阵
Q = eye(X.shape()[0]) # 状态过程噪声协方差矩阵
B = eye(X.shape()[0]) # 控制输入矩阵
U = zeros((X.shape()[0], 1)) # 控制输入向量
Y = array([[X[0, 0] + abs(randn(1)[0])], [X[1, 0] + abs(randn(1)[0])]]) # 测量值向量
H = array([[1, 0, 0, 0], [0, 1, 0, 0]]) # 测量矩阵
R = eye(Y.shape()[0]) # 测量噪声协方差矩阵
N_iter = 50 # Kalman滤波器的迭代次数
应用Kalman滤波器进行状态估计:
for i in arange(0, N_iter):
(X, P) = kf_predict(X, P, A, Q, B, U)
(X, P, K, IM, IS, LH) = kf_update(X, P, Y, H, R)
Y = array([[X[0, 0] + abs(0.1 * randn(1)[0])], [X[1, 0] + abs(0.1 * randn(1)[0])]]) # 更新测量值
在每次迭代中,先进行预测步骤(kf_predict),然后进行更新步骤(kf_update)。预测步骤用于预测下一个时刻的状态和协方差,而更新步骤用于根据测量值来更新状态和协方差,同时计算卡尔曼增益等相关参数。循环迭代过程用于不断更新估计结果,从而逐步优化状态估计值。
五、结果展示
通过运行代码,我们将得到一个包含两个子图的图像,分别展示了估计的位置和速度随时间的变化情况。从图像中可以看出,Kalman滤波器能够很好地估计移动物体的位置和速度,同时考虑了测量噪声和过程噪声的影响,使得估计结果更加稳定和准确。
六、总结
Kalman滤波器是一种非常有用的估计方法,特别适用于线性动态系统的状态估计问题。它通过递归的方式将先验信息和测量信息相结合,得到最优的状态估计结果。本文通过一个简单的Python代码示例演示了Kalman滤波器的应用,希望读者通过本文对Kalman滤波器有一个初步的了解,并能在实际应用中使用它解决相关问题。


















 7566
7566

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











