









本文编辑:调皮哥的小助理
大家好!我是喜欢把问题研究明白的调皮哥。
MIMO雷达是指多发多收天线体制的雷达,MIMO雷达的优点是可以提高雷达的角度分辨率(空间分辨率)。
单输入多输出(SIMO)雷达是单天线发射,多天线接受,SIMO雷达的角度分辨率取决于接受天线个数。具有一个发送四个接收天线的雷达的角度分辨率约为30°,而具有八个接收天线的雷达角度分辨率约为15°。因此,想要提高雷达的角度分辨率,必须增加接收天线的个数才能增加角度分辨率,不过这种方法具有局限性,不光是天线体积会变得很大,跟关键的原因是每一个接收天线上都要附加一个单独的链路来处理信号,比如LNA、混频器、IF滤波器和ADC,这样不光是硬件设计变得复杂,而且成本也会增加。
MIMO雷达具有多发多收天线,一发八收等同于两发四收天线,这为MIMO雷达提供了经济有效的方式来提高雷达的分辨率,主要是天线体积的减小。
本文主要内容有:
(1)MIMO角度估计基本原理
(2)MIMO雷达的基本原理
(3)二维天线
- 角度估计基本原理
关于具体的角度估计计算原理可以看之前的文章:
1发2收天线,如图1.2所示:
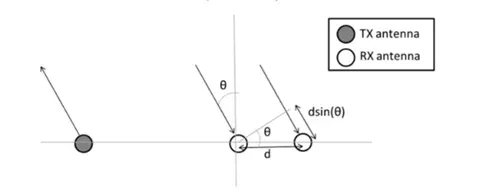
图1.1 1发2收天线
角度估计解算公式如下:
θ = sin − 1 ( ω λ 2 π d ) \theta=\sin ^{-1}\left(\frac{\omega \lambda}{2 \pi d}\right) θ=sin−1(2πdωλ)
其中,d是接收天线的间距, lamuda是波长。最大探测范围计算公式如下:
θ F O V = ± sin − 1 ( λ 2 d ) \theta_{\mathrm{FOV}}=\pm \sin ^{-1}\left(\frac{\lambda}{2 \mathrm{~d}}\right) θFOV=±sin−1(2 dλ)
接收天线越多,雷达的角度分辨率越高,可以看的角度越小,如下图所示4个接收天线的角度无法区分,但是8个接收天线便可以分开。
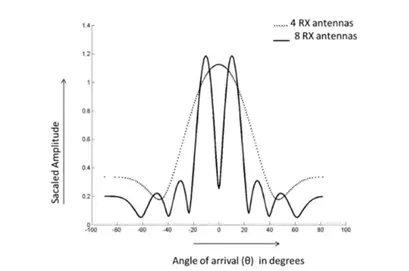
图1.2 接受天线个数与角分辨率
角度分辨率计算公式如下:
Angle resolution given by :
θ
res
=
λ
N
d
cos
(
θ
)
\theta_{\text {res }}=\frac{\lambda}{\mathrm{Nd} \cos (\theta)}
θres =Ndcos(θ)λ
Resolution is often quoted assuming
d
=
N
/
2
\mathrm{d}=\mathrm{N} / 2
d=N/2 and
θ
=
0
⇒
θ
res
=
2
N
\theta=0 \Rightarrow \theta_{\text {res }}=\frac{2}{\mathrm{~N}}
θ=0⇒θres = N2
- MIMO雷达基本原理
角度分辨率增加一倍,接收天线数量就会增加一倍,如果使用MIMO雷达,只增加一个发射天线就可以取代多出的一倍接收天线。
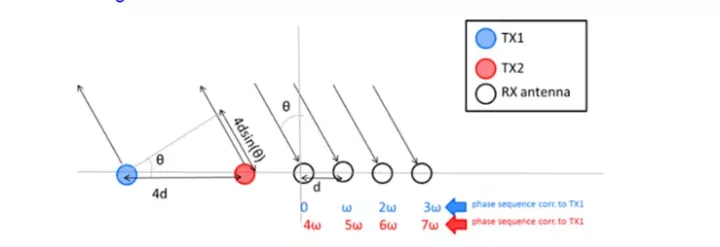
两个发射天线的间距是4d,以第一个RX为参考会出现[0 w 2w 3w ]的相位,TX2发射出来的信号要经过4dsin(θ)的路程,因此会出现[4w 5w 6w 7w]的相位,这就是虚拟阵列,等效为一个发射八个接收。
- 二维天线
与之前的原理一样,都是虚拟阵列。三角形(L型)的天线可以增加俯仰维度的探测范围,可以对目标实现3D、4D点云成像。
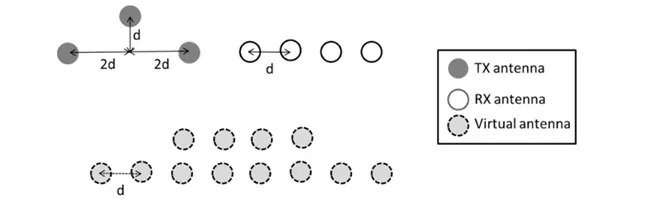
图3.1 二维平面天线


















 390
390

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











