







点云降采样
第一章 点云数据采集
第二章 点云滤波
第三章 点云降采样
第四章 点云关键点检测
第五章 点云特征提取
第六章 点云分割
第七章 点云配准
1. 为什么要降采样?
我们获得的数据量大,特别是几十万个以上的点云,里面有很多冗余数据,会导致处理起来比较耗时。
降采样是一种有效的减少数据、缩减计算量的方法。
2.降采样算法(本数据单位为mm,通常数据单位为m,取半径之类得参数要除1000)
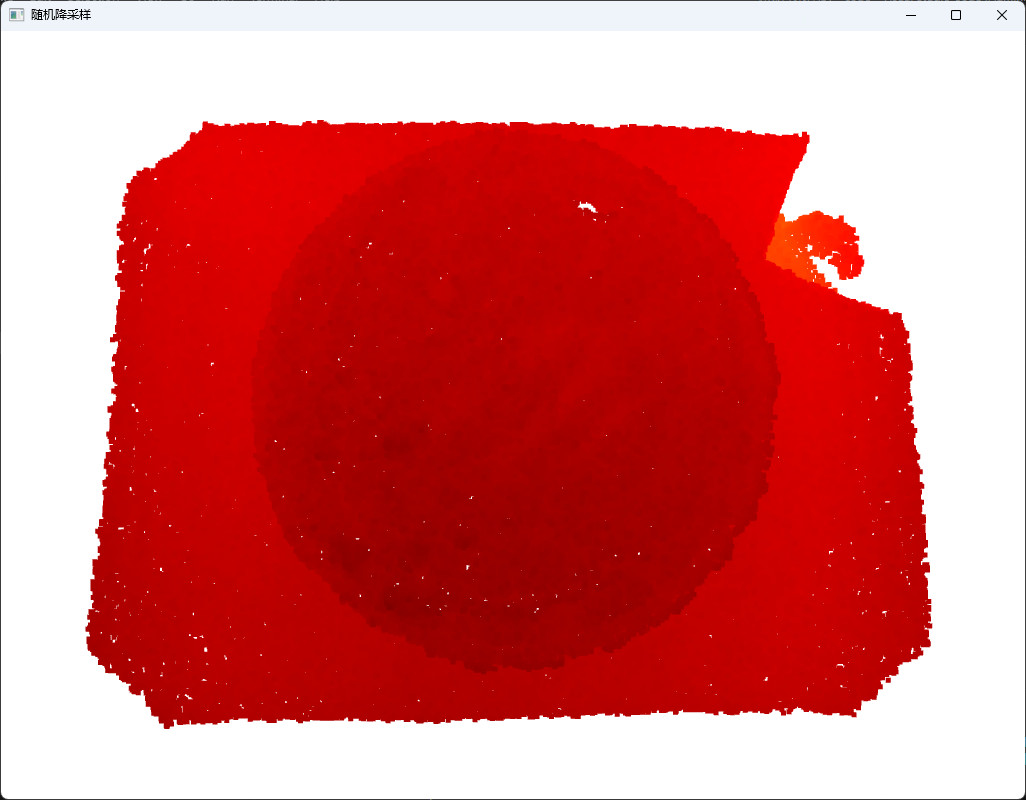
2.1 随机降采样
根据设置的比例系数随机删除点云,比较接近均匀采样,但不稳定。
Open3d
import numpy as np
import open3d as o3d
pcd = o3d.io.read_point_cloud("second_radius_cloud.pcd")
print(pcd) # 输出点云点的个数
o3d.visualization.draw_geometries([pcd], window_name="原始点云",
width=1024, height=768,
left=50, top=50,
mesh_show_back_face=True)
downpcd = pcd.random_down_sample(sampling_ratio=0.5)
print(downpcd) #降采样后的点云数
o3d.visualization.draw_geometries([downpcd], window_name="随机降采样",
width=1024, height=768,
left=50, top=50,
mesh_show_back_face=True)
PCL
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/random_sample.h>
int main(int argc, char** argv) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ> ("1697165371469.pcd", *cloud) == -1){
PCL_ERROR("couldn't read file");
return 0;
}
std::cout << "Loaded " << cloud->width * cloud->height
<< " data points" << std::endl;
pcl::RandomSample<pcl::PointXYZ> random_sampling;
random_sampling.setInputCloud(cloud);
random_sampling.setSample(10000); // 设置希望得到的点数
random_sampling.filter(*cloud_downsampled);
std::cout << "downsampled cloud size: " << cloud_downsampled->width * cloud_downsampled->height << std::endl;
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0); // 设置背景色
viewer->addPointCloud<pcl::PointXYZ>(cloud_downsampled, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");
viewer->initCameraParameters();
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
}
return 0;
}
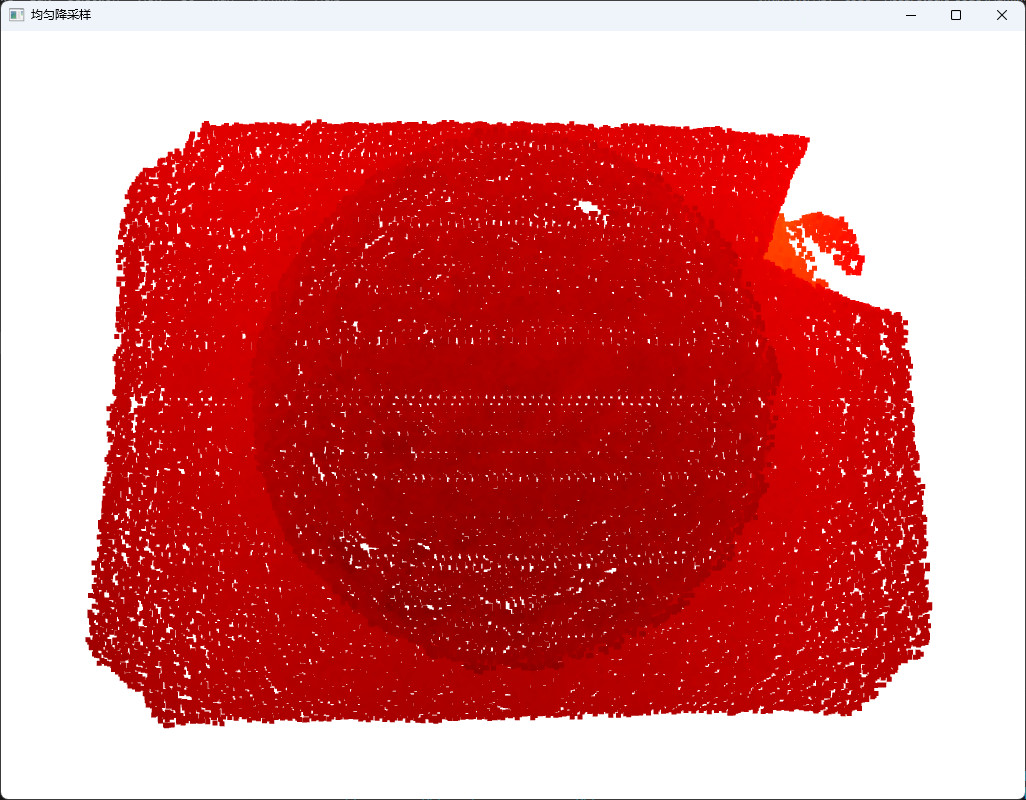
2.2 均匀降采样
就是每隔多远采集一个点,
Open3d
import numpy as np
import open3d as o3d
pcd = o3d.io.read_point_cloud("second_radius_cloud.pcd")
print(pcd) # 输出点云点的个数
o3d.visualization.draw_geometries([pcd], window_name="原始点云",
width=1024, height=768,
left=50, top=50,
mesh_show_back_face=True)
downpcd = pcd.uniform_down_sample(6)
print(downpcd) #降采样后的点云数
o3d.visualization.draw_geometries([downpcd], window_name="均匀降采样",
width=1024, height=768,
left=50, top=50,
mesh_show_back_face=True)
PCL
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/uniform_sampling.h>
int main(int argc, char** argv) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ> ("1697165371469.pcd", *cloud) == -1){
PCL_ERROR("couldn't read file");
return 0;
}
std::cout << "Loaded " << cloud->width * cloud->height
<< " data points" << std::endl;
pcl::UniformSampling<pcl::PointXYZ> filter; // 创建均匀采样对象
filter.setInputCloud(cloud); // 设置待采样点云
filter.setRadiusSearch(10.0f); // 设置采样半径
filter.filter(*cloud_downsampled); // 执行均匀采样,结果保存在cloud_filtered中
std::cout << "downsampled cloud size: " << cloud_downsampled->width * cloud_downsampled->height << std::endl;
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0); // 设置背景色
viewer->addPointCloud<pcl::PointXYZ>(cloud_downsampled, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");
viewer->initCameraParameters();
viewer->saveScreenshot("screenshot.png");
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
}
return 0;
}
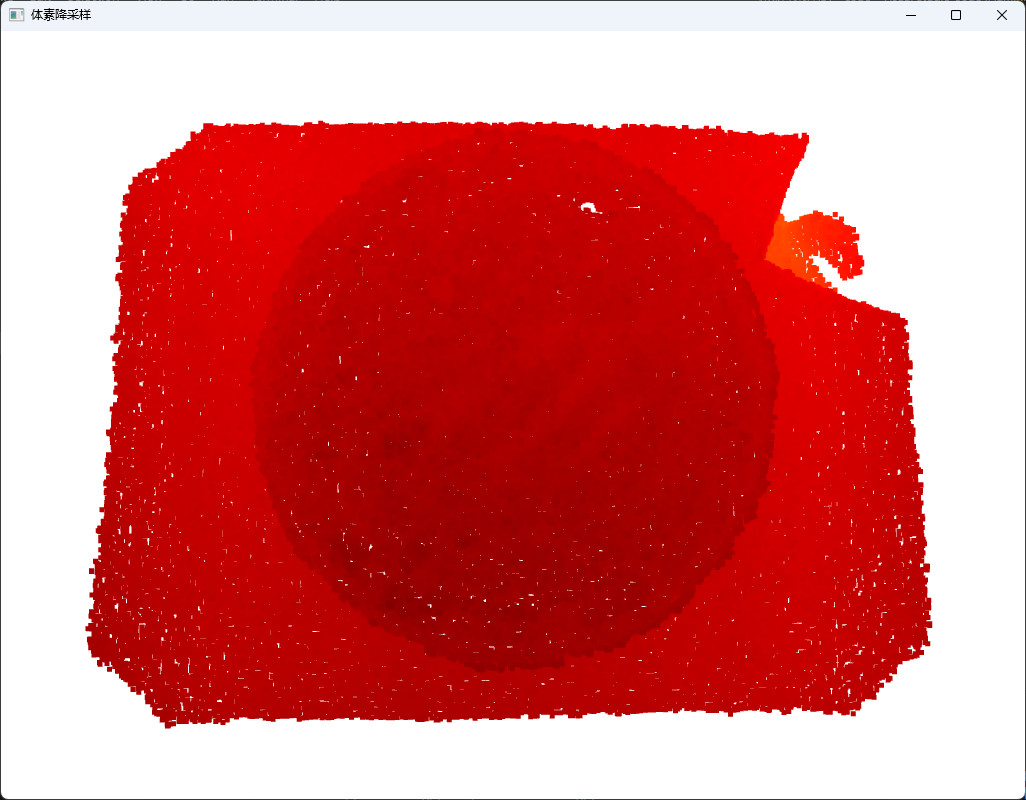
2.3 体素降采样
将空间切割为均匀大小的体素网格,以非空体素的质心代替该体素内的所有点。
原点云位置使用体素降采样后会发生变化。
open3d
import numpy as np
import open3d as o3d
pcd = o3d.io.read_point_cloud("second_radius_cloud.pcd")
print(pcd) # 输出点云点的个数
o3d.visualization.draw_geometries([pcd], window_name="原始点云",
width=1024, height=768,
left=50, top=50,
mesh_show_back_face=True)
downpcd = pcd.voxel_down_sample(voxel_size=5)
print(downpcd)
o3d.visualization.draw_geometries([downpcd], window_name="体素降采样",
width=1024, height=768,
left=50, top=50,
mesh_show_back_face=True)
pcl
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/voxel_grid.h>
int main(int argc, char** argv) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ> ("1697165371469.pcd", *cloud) == -1){
PCL_ERROR("couldn't read file");
return 0;
}
std::cout << "Loaded " << cloud->width * cloud->height
<< " data points" << std::endl;
pcl::VoxelGrid<pcl::PointXYZ> sor;
sor.setInputCloud(cloud);
sor.setLeafSize(10.0f, 10.0f, 10.0f);
sor.filter(*cloud_downsampled);
std::cout << "downsampled cloud size: " << cloud_downsampled->width * cloud_downsampled->height << std::endl;
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0); // 设置背景色
viewer->addPointCloud<pcl::PointXYZ>(cloud_sampled, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");
viewer->initCameraParameters();
viewer->saveScreenshot("screenshot.png");
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
}
return 0;
}
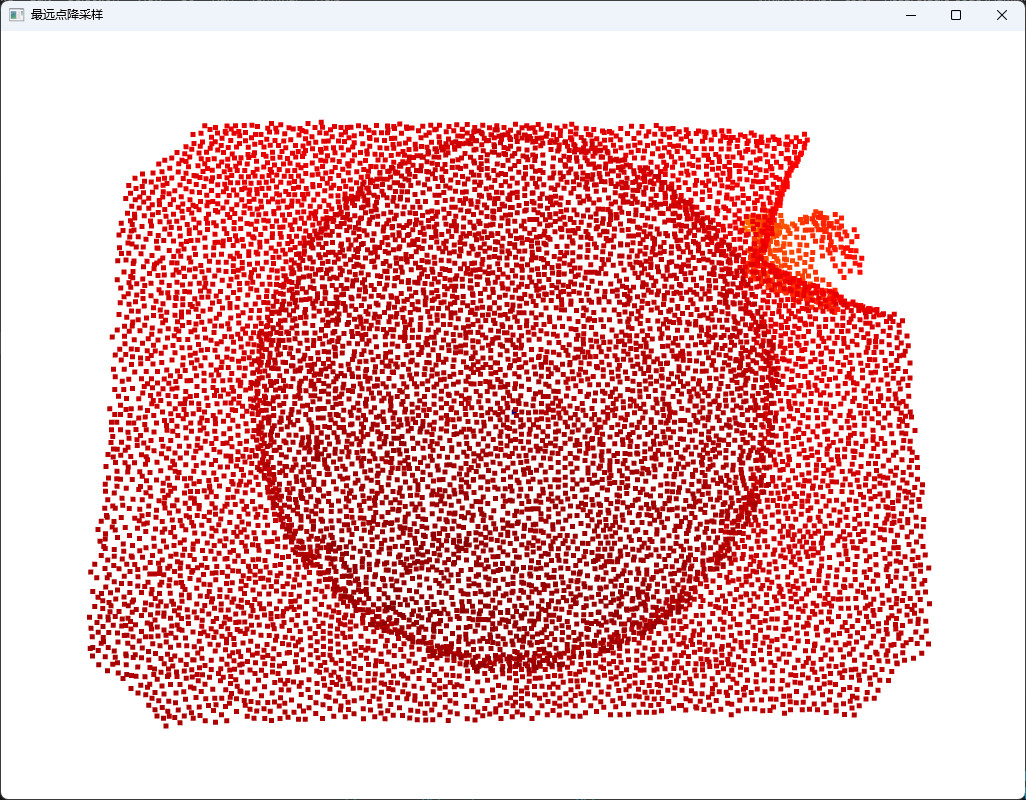
2.4 最远点降采样
首先随机选择一个点,其次,在剩下点中寻找最远的点,再去再剩下点中找到同时离这两个点最远的点,直到满足采样点个数。
Open3d
import numpy as np
import open3d as o3d
pcd = o3d.io.read_point_cloud("second_radius_cloud.pcd")
print(pcd) # 输出点云点的个数
o3d.visualization.draw_geometries([pcd], window_name="原始点云",
width=1024, height=768,
left=50, top=50,
mesh_show_back_face=True)
downpcd=pcd.farthest_point_down_sample(10000)
print(downpcd) #降采样后的点云数
o3d.visualization.draw_geometries([downpcd], window_name="最远点降采样",
width=1024, height=768,
left=50, top=50,
mesh_show_back_face=True)
PCL
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/common/distances.h>
int main(int argc, char** argv) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ> ("1697165371469.pcd", *cloud) == -1){
PCL_ERROR("couldn't read file");
return 0;
}
std::cout << "Loaded " << cloud->width * cloud->height
<< " data points" << std::endl;
size_t N = cloud->size();
assert(N >= 10000);
srand(time(0));
size_t seed_index = rand() % N;
pcl::PointXYZ p = cloud->points[seed_index];;
cloud_downsampled->push_back(p);
cloud->erase(cloud->begin() + seed_index);
for (size_t i = 1; i < 10000; i++)
{
float max_distance = 0;
size_t max_index = 0;
for (size_t j = 0; j < cloud->size(); j++)
{
float distance = pcl::euclideanDistance(p, cloud->points[j]);
if (distance > max_distance)
{
max_distance = distance;
max_index = max_index;
}
}
p = cloud->points[max_index];
cloud_downsampled->push_back(p);
cloud->erase(cloud->begin() + max_index);
}
std::cout << "downsampled cloud size: " << cloud_downsampled->width * cloud_downsampled->height << std::endl;
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0); // 设置背景色
viewer->addPointCloud<pcl::PointXYZ>(cloud_downsampled, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");
viewer->initCameraParameters();
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
}
return 0;
}
2.5 移动最小二乘法降采样
在MLS法中,需要在一组不同位置的节点附近建立拟合曲线,每个节点都有自己的一组系数用于定义该位置附近拟合曲线的形态。因此,在计算某个节点附近的拟合曲线时,只需要计算该点的该组系数值即可。
此外,每个节点的系数取值只考虑其临近采样点,且距离节点越近的采样点贡献越大,对于未置较远的点则不予考虑。
许多文章都将移动最小二乘法作为降采样方法,我觉得这只是一种平滑,所以这里给了重建代码,不进一步实验了。
PCL
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/surface/mls.h>
#include <pcl/search/kdtree.h>
int main(int argc, char** argv) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ> ("second_radius_cloud.pcd", *cloud) == -1){
PCL_ERROR("couldn't read file");
return 0;
}
std::cout << "Loaded " << cloud->width * cloud->height
<< " data points" << std::endl;
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ>);
// 输出的PointCloud中有PointNormal类型,用来存储MLS算出的法线
pcl::PointCloud<pcl::PointNormal> mls_points;
// 定义MovingLeastSquares对象并设置参数
pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointNormal> mls;
mls.setComputeNormals(true);
mls.setInputCloud(cloud);
mls.setSearchMethod(tree);
mls.setSearchRadius(30);
// 曲面重建
mls.process(mls_points);
//std::cout << "downsampled cloud size: " << mls_points->width * mls_points->height << std::endl;
// 使用PCLVisualizer进行可视化
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("MLS Cloud Viewer"));
viewer->addPointCloud<pcl::PointNormal>(mls_points.makeShared(), "MLS Cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "MLS Cloud");
viewer->addPointCloudNormals<pcl::PointNormal>(mls_points.makeShared(), 1, 0.05, "normals"); // 可选:显示法线
viewer->saveScreenshot("screenshot.png");
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
}
return 0;
}
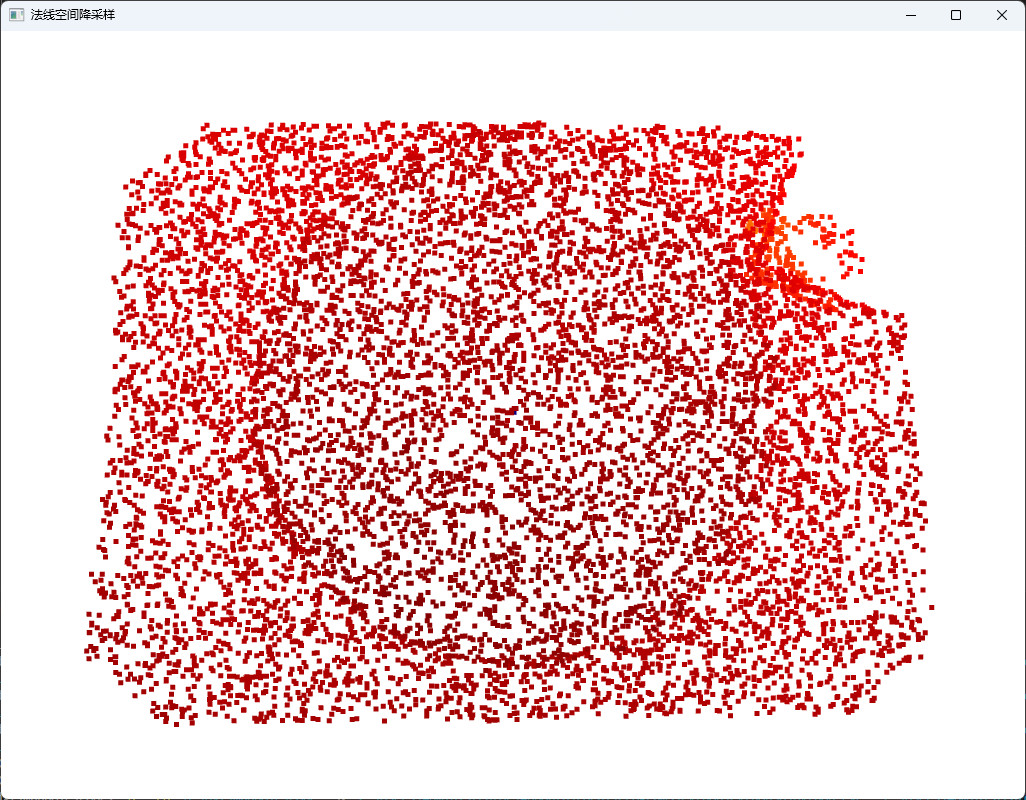
2.6 法线空间采样
通过在法向量空间内均匀随机抽样,使所选点之间的法线分布尽可能大,结果表现为地物特征变化大的地方剩余点较多,变化小的地方剩余点稀少,可有效保持地物特征。
Open3d
import open3d as o3d
import numpy as np
def normal_space_sampling(pcd, num_bins=5, num_samples=10000):
# 1. 估算法线
pcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=10, max_nn=30))
normals = np.asarray(pcd.normals)
# 2. 使用法线的x、y和z分量将法线映射到一个3D直方图或“bin”空间
bins = np.linspace(-1, 1, num_bins)
normal_bins = np.digitize(normals, bins)
unique_bins = np.unique(normal_bins, axis=0)
sampled_indices = []
for b in unique_bins:
indices = np.all(normal_bins == b, axis=1)
bin_points = np.where(indices)[0]
if bin_points.size > 0:
sampled_indices.append(np.random.choice(bin_points))
# 如果采样点数不足,从原点云中随机选择其他点
while len(sampled_indices) < num_samples:
sampled_indices.append(np.random.randint(0, len(pcd.points)))
# 3. 从每个bin中选择一个点进行采样
sampled_points = np.asarray(pcd.points)[sampled_indices]
sampled_pcd = o3d.geometry.PointCloud()
sampled_pcd.points = o3d.utility.Vector3dVector(sampled_points)
return sampled_pcd
# 读取点云
pcd = o3d.io.read_point_cloud("second_radius_cloud.pcd")
sampled_pcd = normal_space_sampling(pcd)
o3d.visualization.draw_geometries([sampled_pcd])
PCL
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/normal_space.h>
#include <pcl/features/normal_3d.h>
int main(int argc, char** argv) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ> ("second_radius_cloud.pcd", *cloud) == -1){
PCL_ERROR("couldn't read file");
return 0;
}
std::cout << "Loaded " << cloud->width * cloud->height
<< " data points" << std::endl;
// 计算法线
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cloud);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
ne.setSearchMethod(tree);
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals(new pcl::PointCloud<pcl::Normal>);
ne.setRadiusSearch(30); // 设置法线估计的半径
ne.compute(*cloud_normals);
// 法线空间采样
pcl::NormalSpaceSampling<pcl::PointXYZ, pcl::Normal> nss;
nss.setInputCloud(cloud);
nss.setNormals(cloud_normals);
nss.setBins(5, 5, 5); // 设置法线空间的bin数量
nss.setSample(cloud->size() / 10); // 例如,取原始点云大小的1/10
nss.filter(*cloud_downsampled);
std::cout << "downsampled cloud size: " << cloud_downsampled->width * cloud_downsampled->height << std::endl;
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0); // 设置背景色
viewer->addPointCloud<pcl::PointXYZ>(cloud_downsampled, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");
viewer->initCameraParameters();
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
}
return 0;
}
















 2019
2019











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









