






接上文:Center based 3D Object Detection and Tracking。在看完整体网络结构以后,还是非常感兴趣主干网络从点云中提取出了那些特征,所以对主干网络的输出进行了可视化。
可视化结果
对主干网络的输出进行可视化,选取KITTI 05 数据集的一帧点云。可视化的网络模型依旧是来自Livox开源的检测算法
livox detection。主干网络最后输出的张量维度为448×1120×128,其中前两个维度对应空间维度的长宽,分辨率为0.2m。 网络这对livox激光雷达设计所以检测正前方距离被设计为最远224m(1120×0.2=224)。我这里之间使用KITTI数据集测试,最远探测距离100m,所以对特征长度裁剪一下方便显示。

共计128维的特征可视化结果展示为下面的128张图片。(按从上往下从左往右编码1-128)。下图中的ROI范围和上图左一的点云范围基本对齐。
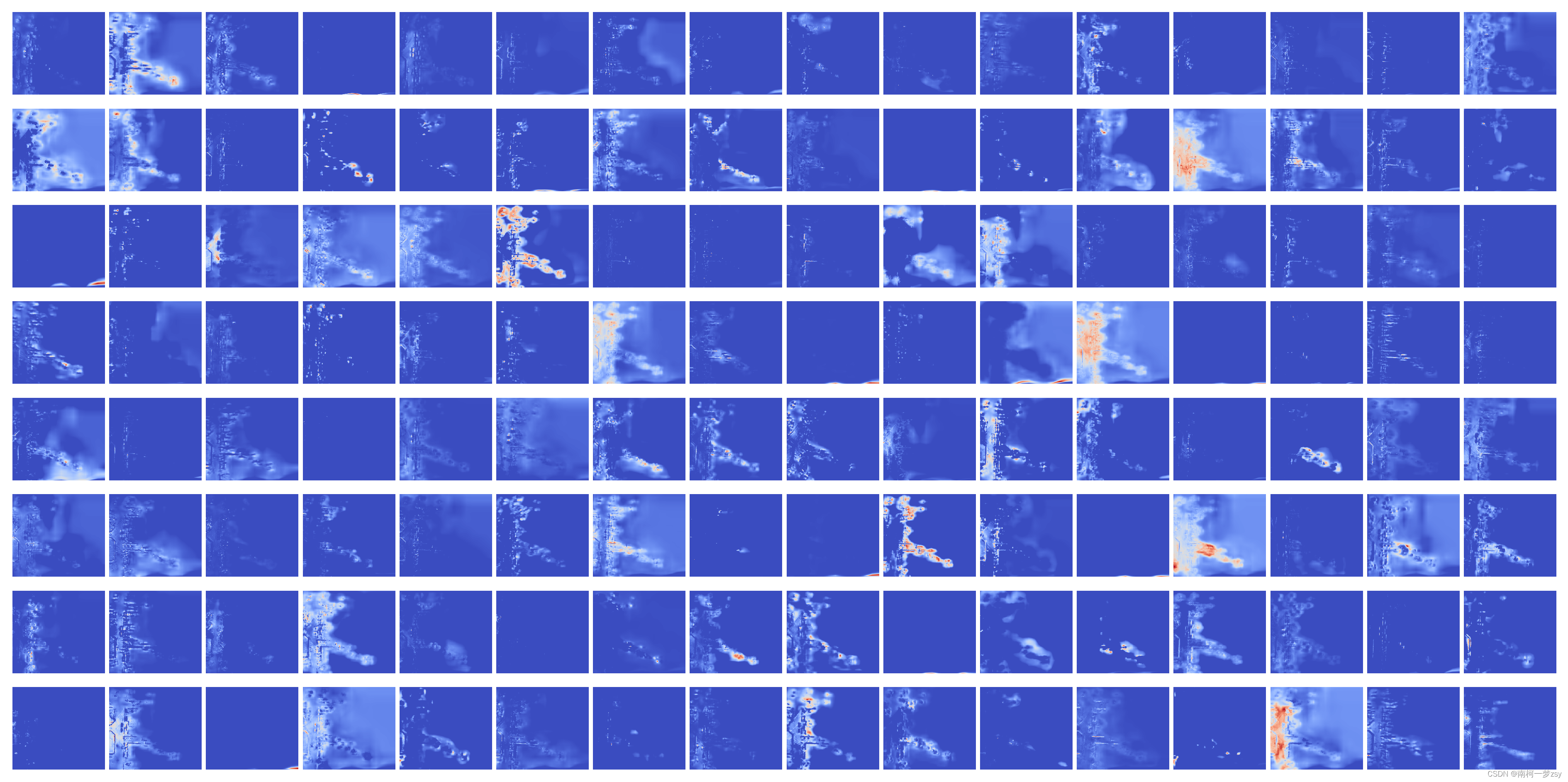
从这个可视化结果上来看,有的特征层似乎是对BEV视角下高频信号比较敏感,比如第6;有的对高度表较高的高频信号比较敏感(墙),比如41号特征;有的对低频点比较敏感 比如第35号特征;有的层是从有点云的地方向没有点的地方弥散的感觉,没有点地方距离有点的地方越近,反应越强烈(第38层)。

















 690
690

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









