







一、前言
“在宇宙中,曲率驱动航迹既可以成为危险标志,也能成为安全声明。 如果航迹在一个世界旁边,是前者;如果把这个世界包裹在其中,则是后者。就像一个手拿绞索的人,他是危险的;但如果他把绞索套到自己的脖子上,他就变成安全的了。”
同一事物在不同情境下可能具有截然相反的属性,这是一种既对立又统一的哲学,万事万物都不可能是独立存在,放眼整个宇宙也是在这种矛盾中周而复始!
二、概率栅格地图的概念
概率栅格地图是一种用于表示环境的二维或三维网格地图,每个栅格单元表示该位置被占用的概率。概率栅格地图广泛应用于机器人导航、自动驾驶和SLAM等领域。
三、概率栅格地图的推导



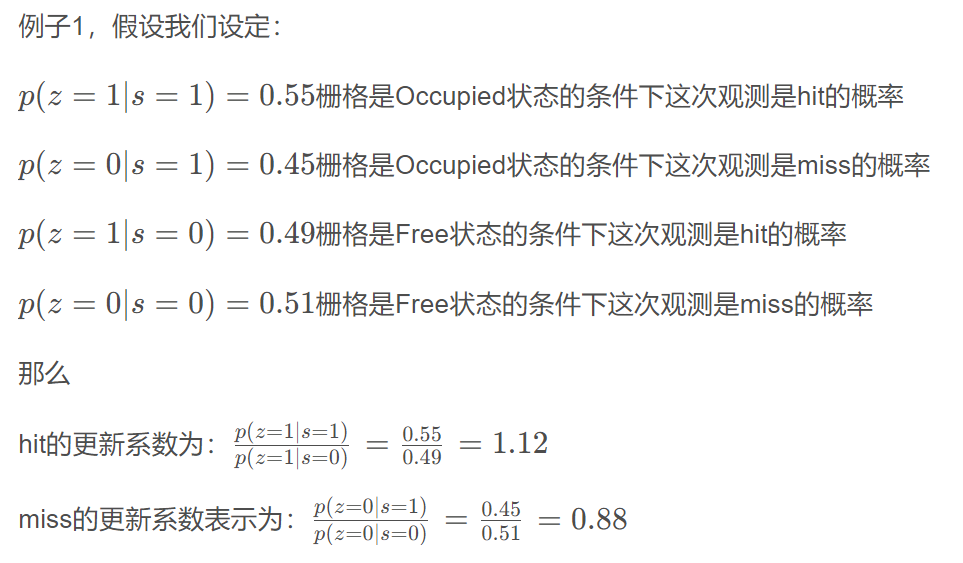
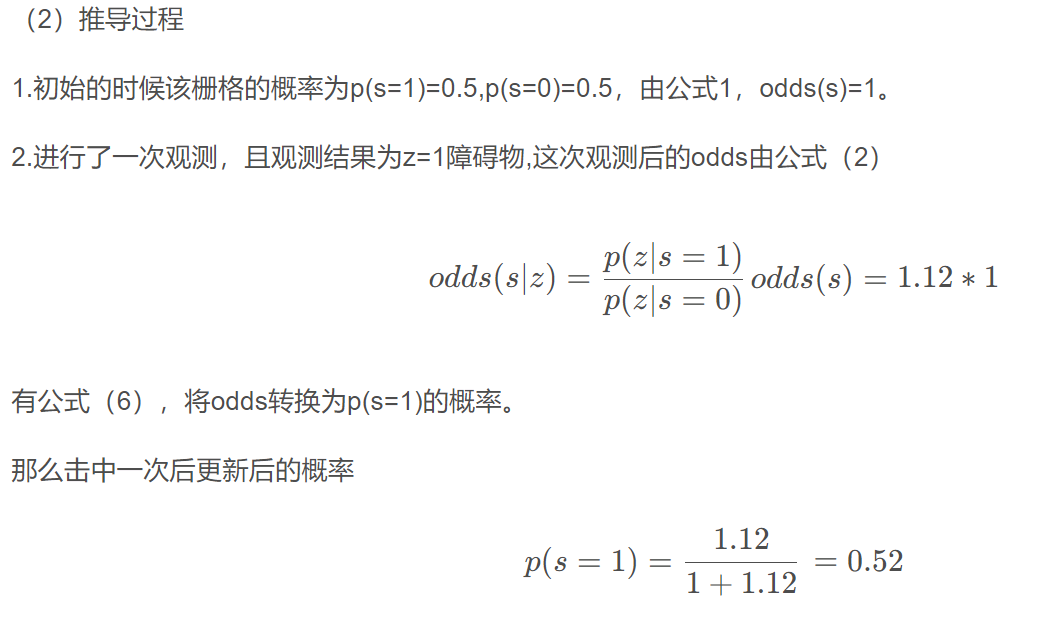
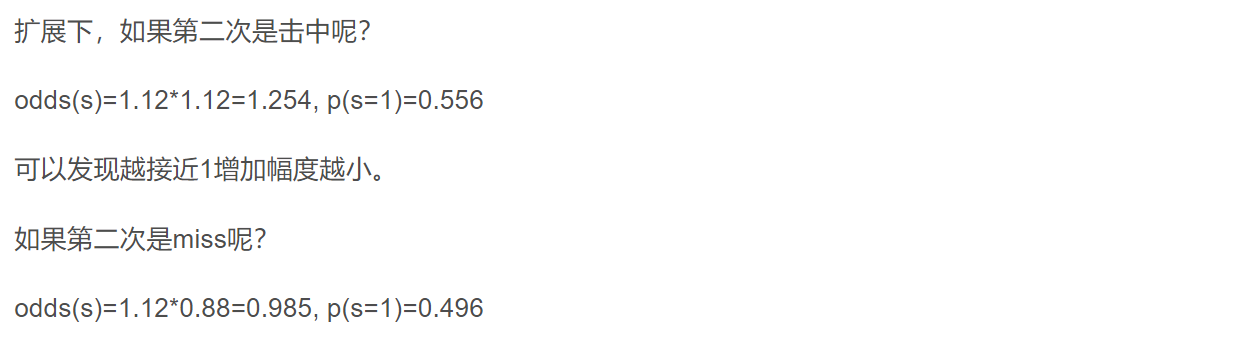
四、实例
五、简单代码实现
#include <vector>
#include <cmath>
#include <iostream>
#include <algorithm>
#include <math.h>
#include <cstring>
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
using namespace std;
using namespace cv;
// 概率栅格单元定义
struct GridCell
{
GridCell() : log_odds(0.0), occ_pro(0.5)
{
}
void updateOdds(float odds)
{
log_odds = odds;
occ_pro = 1.0f / (1.0f + std::exp(-log_odds));
}
float getLogOdds()
{
return log_odds;
}
float getOccPro()
{
return occ_pro;
}
private:
float log_odds{0.0}; // 对数几率值
float occ_pro{0.5}; // 障碍物概率
};
// 概率栅格地图类
class ProbabilityGrid
{
public:
// 初始化地图参数
ProbabilityGrid(int width, int height, float resolution)
: width_(width), height_(height), resolution_(resolution)
{
cells_ = new GridCell[width * height];
}
// 更新激光扫描数据
void updateLaserScan(const cv::Point &sensor_origin,
const std::vector<cv::Point> &hits);
// 查询栅格概率
float getProbability(int x, int y) const;
// 转换成栅格地图
void transformCvMap();
private:
// Bresenham直线算法
std::vector<cv::Point> bresenhamLine(cv::Point start,
cv::Point end);
// 栅格值有效判断
bool isValidGrid(int mx, int my) const;
// 获取index
inline int getIndex(int mx, int my) const;
// 更新单个栅格的log odds
void updateCell(int x, int y, float delta);
// 常量参数
static constexpr float kHitOdds = 0.7f; // 对应log(0.7/(1-0.7)) ≈ 0.85
static constexpr float kMissOdds = -0.4f; // 对应log(0.3/(1-0.3)) ≈ -0.85
static constexpr float kMaxLogOdds = 20.0f; // 对数几率最大绝对值
// 地图参数
int width_, height_; // 栅格数量
float resolution_; // 米/栅格
GridCell *cells_; // 栅格数据
};
// --------------------------------------------------------------------------
// 更新激光扫描数据
void ProbabilityGrid::updateLaserScan(const cv::Point &sensor_origin,
const std::vector<cv::Point> &hits)
{
for (const auto &hit : hits)
{
// 遍历光束路径上的所有栅格
auto ray = bresenhamLine(sensor_origin, hit);
// 更新Miss区域(路径上的栅格,排除终点)
for (size_t i = 0; i < ray.size() - 1; ++i)
{
updateCell(ray[i].x, ray[i].y, kMissOdds);
}
// 更新Hit区域(终点)
updateCell(hit.x, hit.y, kHitOdds);
}
}
float ProbabilityGrid::getProbability(int x, int y) const
{
if (isValidGrid(x, y))
{
return cells_[getIndex(x, y)].getOccPro();
}
else
{
return 0;
}
}
inline int ProbabilityGrid::getIndex(int mx, int my) const { return my * width_ + mx; }
bool ProbabilityGrid::isValidGrid(int mx, int my) const
{
return (mx < width_ && mx >= 0 && my < height_ && my >= 0);
}
std::vector<cv::Point> ProbabilityGrid::bresenhamLine(cv::Point start,
cv::Point end)
{
std::vector<cv::Point> points;
int x0 = start.x;
int y0 = start.y;
int x1 = end.x;
int y1 = end.y;
// 处理起点和终点重合的情况
if (x0 == x1 && y0 == y1)
{
points.emplace_back(x0, y0);
return points;
}
// 计算差分和步长
int dx = std::abs(x1 - x0);
int dy = -std::abs(y1 - y0);
int sx = (x0 < x1) ? 1 : -1;
int sy = (y0 < y1) ? 1 : -1;
int err = dx + dy; // 误差项
while (true)
{
points.emplace_back(x0, y0);
// 到达终点时终止
if (x0 == x1 && y0 == y1)
break;
int e2 = 2 * err;
// 误差累积判断
if (e2 >= dy)
{ // 水平步进
if (x0 == x1)
break; // 防止在垂直线上无限循环
err += dy;
x0 += sx;
}
if (e2 <= dx)
{ // 垂直步进
if (y0 == y1)
break; // 防止在水平线上无限循环
err += dx;
y0 += sy;
}
}
return points;
}
void ProbabilityGrid::updateCell(int x, int y, float delta)
{
if (isValidGrid(x, y))
{
int idx = getIndex(x, y);
float new_log_odds = clamp(cells_[idx].getLogOdds() + delta, -kMaxLogOdds, kMaxLogOdds);
cells_[idx].updateOdds(new_log_odds);
}
else
{
return;
}
}
void ProbabilityGrid::transformCvMap()
{
cv::Mat obs_map(height_, width_, CV_8UC1, cv::Scalar(100));
for (int i = 0; i < width_; ++i)
{
for (int j = 0; j < height_; ++j)
{
int cost = getProbability(i, j) > 0.5 ? 0 : 255;
obs_map.at<uchar>(j, i) = cost;
}
}
}
/
// --------------------- 示例使用 ---------------------------
int main()
{
using namespace std;
// 创建1米分辨率,10x10米的地图
ProbabilityGrid grid(10, 10, 1.0f);
// 模拟激光扫描数据:原点(5,5),命中点(7,7)
cv::Point origin = {5, 5};
std::vector<cv::Point> hits = {{7, 7}};
// 更新地图
grid.updateLaserScan(origin, hits);
// 查询命中点概率
std::cout << "Hit cell probability: "
<< grid.getProbability(7, 7) << std::endl; // 应接近0.7
// 多次更新模拟
for (int i = 0; i < 8; ++i)
{
grid.updateLaserScan(origin, hits);
}
std::cout << "After 8 hits: "
<< grid.getProbability(7, 7) << std::endl; // 概率应接近0.97
std::cout << "After 8 hits: "
<< grid.getProbability(6, 6) << std::endl;
return 0;
}
结语:Cartographer中为了提高效率,用查表操作直接代替运算操作,以空间换时间。

















 1167
1167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









