







 ROS(Robot Operating System)是一种机器人软件开发的中间件,提供硬件抽象、设备控制、消息传递等服务。它不是操作系统,但为异构计算机集群提供服务。Ros通过中间件实现不同组件间的通信,其生态系统包含语言和平台独立的工具、ROS客户端库以及应用代码包。节点和话题是ROS中的基本概念,每个节点是独立进程,通过话题进行多对多通信,ROS Master负责处理节点间通信。Ros被广泛用于自动驾驶系统的搭建,如Jetson-car等开源项目。
ROS(Robot Operating System)是一种机器人软件开发的中间件,提供硬件抽象、设备控制、消息传递等服务。它不是操作系统,但为异构计算机集群提供服务。Ros通过中间件实现不同组件间的通信,其生态系统包含语言和平台独立的工具、ROS客户端库以及应用代码包。节点和话题是ROS中的基本概念,每个节点是独立进程,通过话题进行多对多通信,ROS Master负责处理节点间通信。Ros被广泛用于自动驾驶系统的搭建,如Jetson-car等开源项目。

Ros在搭建自动驾驶系统中的使用
Ros简介
Robot Operating System (ROS or ros) is robotics middleware (i.e. collection of software frameworks for robot software development). 作为一个中间框架属性的软件,Ros给开发人员提供很好的底层屏蔽和上层的扩展性。
Although ROS is not an operating system, it provides services designed for a heterogeneous computer cluster such as hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management.
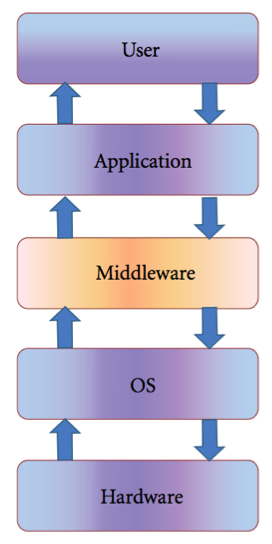
Middleware简介
General Definition: software that connects software components. A layer that lies between the operating system and the applications on each side of a distributed computer network.
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 289
289

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









