







机器人控制
控制系统的特点
- 机器人的控制与机构运动学及动力学密切相关:坐标变换、运动学正逆问题、惯性力等影响;
- 机器人控制系统是多变量自动控制系统:机器人至少3-7个自由度,每个自由度一个驱动(伺服、步进、液压、气动)机构,这些独立的伺服系统有机地协调起来,完成期望动作;
- 机器人控制系统是非线性的控制系统:描述机器人状态和运动的数学模型随状态和外力的变化,其参数也在变化,各变量之间还存在耦合,经常使用重力补偿、前馈、解耦或自适应控制等方法;
- 机器人的动作往往可以通过不同的方式和路径来完成,因而存在一个“最优”的问题。智能机器人可以根据传感器和模式识别的方法获得对象及环境的工况,自动地选择最佳的控制规律。
控制方式
反馈信号

控制目标对象
位置控制:
点位控制:要求准确地控制机器人末端执行器的工作位置,而路径却无关紧要,如在印刷电路板上安插元件、点焊、装配等工作。
连续轨迹控制:要求机器人末端执行器按照示教的轨 迹和速度运行,如弧焊、喷漆、抛光等作业。
力控制:
输入量、反馈信号为力(力矩)信号,控制与位置控制基本相同。 装配打磨场景。**
基于传感器的控制、滑模控制、最优控制、自适应控制、递阶控制及各种智能控制
主要控制变量
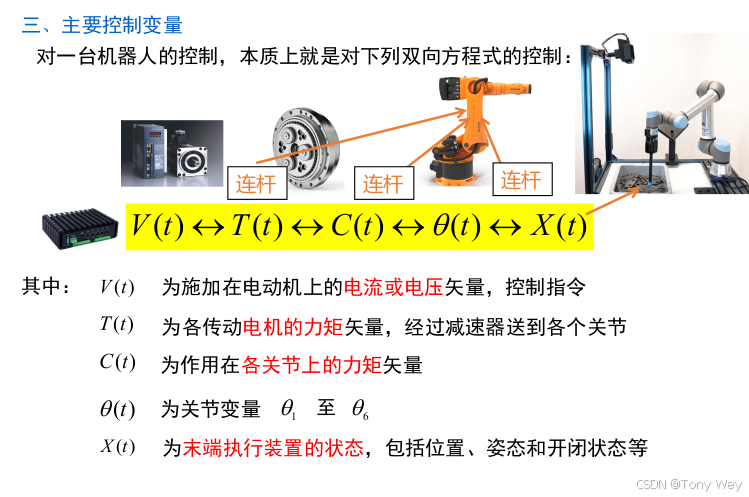
控制方法
PID控制策略(伺服驱动器)
PID控制器的三个参数有不同的控制作用。
(1)P控制器实质上是一个具有可调增益的放大器。在控制系统中,增大k P 可加快响应速度,但过大容易出现振荡;
(2)积分控制器I能消除或减弱稳态偏差,但它的存在会使系统到达稳态的时间变长,限制系统的快速性;
(3)微分控制D规律能反映输入信号的变化趋势,相对比例控制规律而言具有预见性,增加了系统的阻尼程度,有助于减少超调量,克服振荡,使系统趋于稳定,加快系统的跟踪速度,但对输入信号的噪声很敏感。
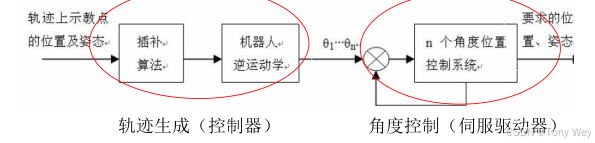
基于机器人模型的控制策略(工业机器人控制器)
机器人控制器根据DH参数,计算出机器人位姿。
又例如:机器人速度控制
机器人运动的控制实际上是通过各轴伺服系统分别控制来实现的。分解运动的速度控制要求各伺服系统的驱动器以不同的分速度同时联合运行,能保证机器人末端执行器沿笛卡儿坐标轴稳定地运行 。控制时先把末端执行器期望的笛卡儿位姿分解为各关节的期望速度,然后再对各关节进行伺服控制。
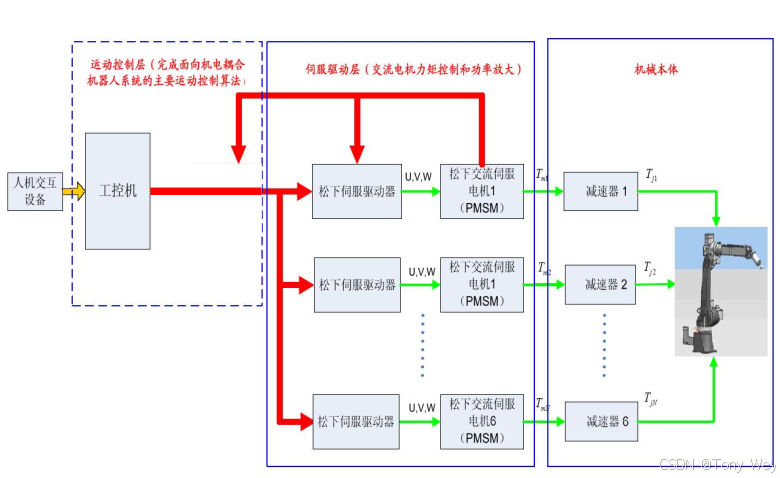
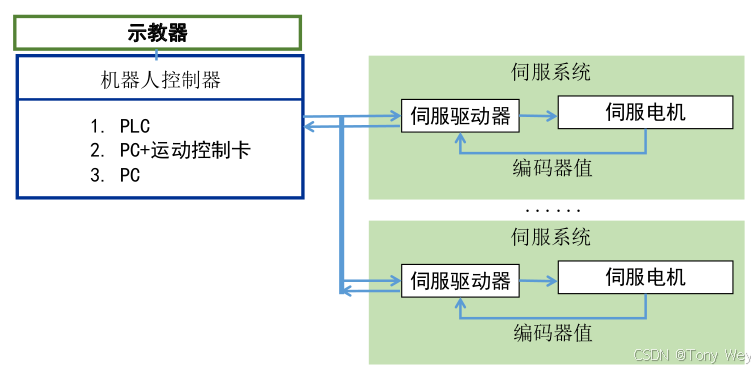
机器人控制系统的基本结构
从基本机构上看一个典型的机器人电气控制系统,主要由控制器、伺服驱动器、伺服电机、示教器、安全单元等构成。
控制系统的关键组成部件
电机
舵机:是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度。角度由控制线上的脉冲持续时间决定,这叫做脉冲编码调制。伺服系统期望每20毫秒看到一个脉冲(0.02秒)。在20ms内,脉冲的长度将决定电机转的角度。
步进电机:是一种将电脉冲信号变换成相应的角位移或直线位移的机电执行元件。每当输入一个电脉冲,电机将转动一个角度前进一步。脉冲一个个输入,电机便一步一步转动,“步进电机”即由此得名。
特点:
1、一般步进电机的精度为步距角的3-5%;
2、步进电机外表允许的最高温度为摄氏80-90度;
3、步进电机的力矩会随转速的升高而下降;
4、步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。
5、一种开环控制结构,没有编码器。
6、不能过载。导致失步,发热烧坏电机线圈。结构简单、使用维护方便、可靠性高、制造成本低等一系列的优点,步进电机常被广泛应用于开环结构、精度要求不高的系统中。
直流伺服电机:有刷和无刷电机。有刷电机要换碳刷;无刷电机的电子换相方式免维护。协作机器人
特点:
(1)稳定;(2)可控;(3)响应迅速;(4)损耗小;
缺点是:
1.有换向器和电刷之间的滑动接触,碳刷粉尘,接触电阻的变化会使工作性能的稳定性受到影响;
2.电刷下的火花使换向器需要经常维护,使其不能在易爆炸的地方使用,且产生无线干扰,又因控制电源是直流,使得放大元件变得复杂。
交流伺服电机:同步和异步电机,目前运动控制中一般都用同步电机。伺服电机内部的转子是永磁铁。一般工业机器人
优点:
- 机械特性比较好,连续工作区范围更大;无电刷和换向器,因此工作可靠,对维护和保养要求低;
- 定子绕组散热比较方便;
- 适应于高速大力矩工作状态;
- 同功率下有较小的体积和重量
工业机器人对伺服电机的要求:
- 带抱闸
- 高过载,4-6倍
- 大惯量,短粗型
工业机器人选用扁平的大惯量电机,平衡负载的惯量,短粗型机床选用小惯量电机,细长型
伺服电机–编码器
闭环控制是提高运动控制系统运动精度的重要手段,而位置检测传感器则是构成闭环控制必不可少的重要元件。
位置检测传感器对控制对象的实际位置进行检测,并将位置信息传送给运动控制器,由运动控制器根据控制对象的实际值调整输出信号。
常用的位置传感器有电位器、编码器、光栅尺、差动变压器、旋转变压器等。
伺服驱动器
伺服系统的要求
- 调速范围宽 r n = n m i n / n m a x r_{n}=n_{min}/n_{max} rn=nmin/nmax
- 定位精度高
- 有足够的传动刚性和高的速度稳定性
- 快速响应,无超调即要求跟踪指令信号的响应要快,因为机器人在启动、制动时,要求加、减加速度足够大,缩短进给系统的过渡过程时间,减小误差。
- 低速大转矩,过载能力强一般来说,伺服驱动器具有数分钟甚至半小时内1.5倍以上的过载能力,在短时间内可以过载4-6倍而不损坏。
伺服驱动器有三种控制方式:
1)位置控制方式。
2)速度控制方式;
3)转矩控制方式;
伺服总线-EtherCAT
制动电阻
目的:电机减速时,电机反向供电,母线会过压,为了释放电机动能。
原理:增大电阻功率
伺服驱动器有内置电阻,但是功率不够,需要外接制动电阻。
示教器



















 1204
1204

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











