







功能描述:增量式编码器同服重新上点后寻找零点,理论上碰撞点是零点,在碰到零点后需要向相反反向移动,向相反方向移动多少通过luna软件设置,完成寻零并返回后将停下的位置设置为新原点;
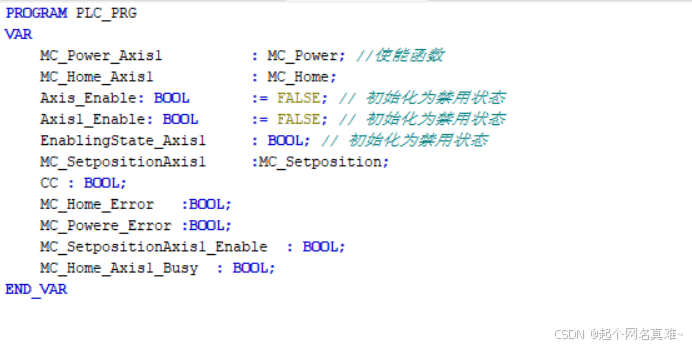
定义:
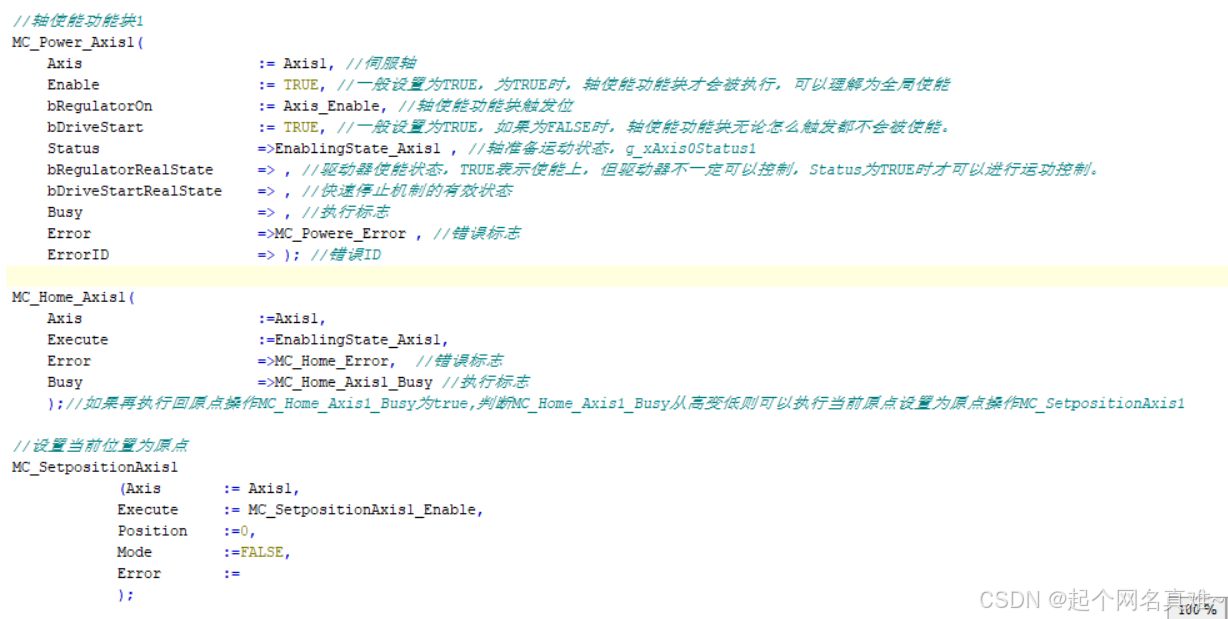
代码:”
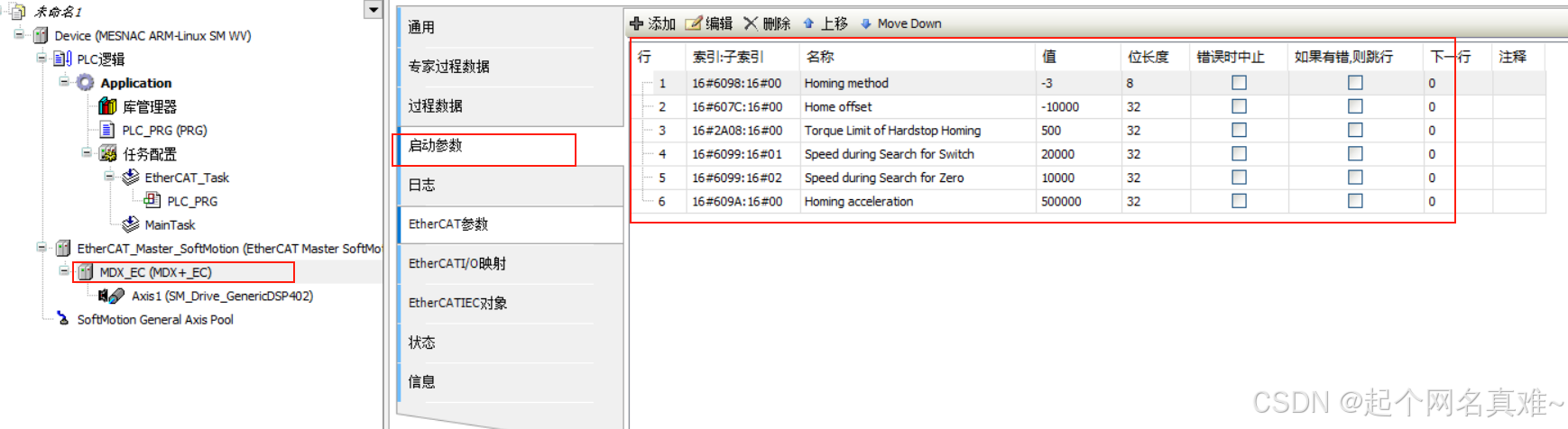
 参数没什么好说的,根据不同型号查手册
参数没什么好说的,根据不同型号查手册


















 4万+
4万+
05-24
05-24
02-14
功能描述:增量式编码器同服重新上点后寻找零点,理论上碰撞点是零点,在碰到零点后需要向相反反向移动,向相反方向移动多少通过luna软件设置,完成寻零并返回后将停下的位置设置为新原点;
定义:
代码:”
参数没什么好说的,根据不同型号查手册

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











