







 本文介绍了舵机的工作原理,其角度变化通过调节PWM信号的占空比实现。讲解了舵机的三根线连接方式,以及使用Arduino Uno R3如何通过程序控制舵机从0°到180°,再到0°的转动过程。
本文介绍了舵机的工作原理,其角度变化通过调节PWM信号的占空比实现。讲解了舵机的三根线连接方式,以及使用Arduino Uno R3如何通过程序控制舵机从0°到180°,再到0°的转动过程。
1、舵机控制原理
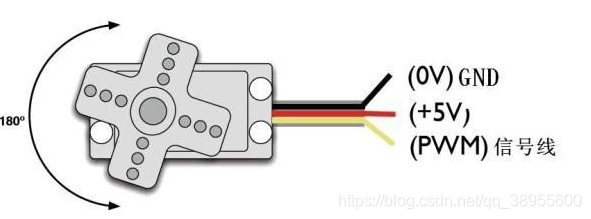
舵机实际上是一种位置伺服的驱动器主要是由外壳、无核心马达、齿轮所构成。舵机转动的角度是通过调节PWM「脉冲宽度调制」信号的占空比来实现的。标准的PWM信号的周期固定为20ms,理论上脉宽分布应该在1ms到2ms之间,实际上可由0.5ms到2.5ms之间,脉宽与转角0°—180°相对应。
2实物
舵机一般都外接三根线,分别用棕、红、橙三种颜色进行区分,由于品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。
3、材料
Uno R3开发板
- 配套USB数据线
- 配套连接线
- 舵机
4、程序控制
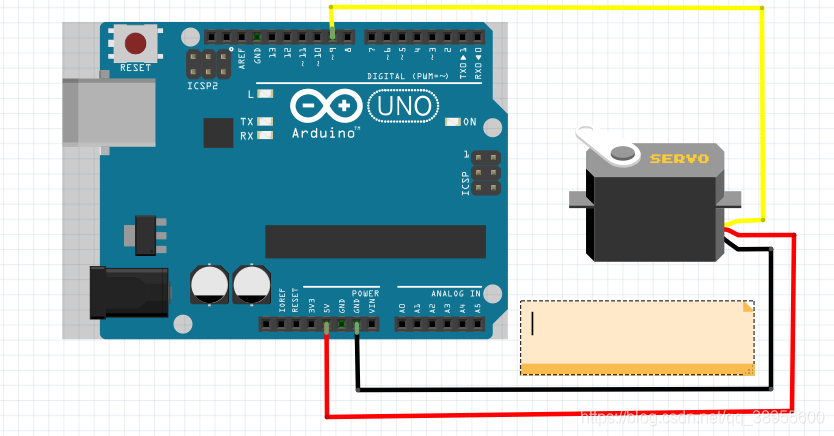
#include <Servo.h>
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1769
1769

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









