







 本文介绍了自动驾驶汽车的概念及其分级标准,详细解析了从驾驶支援到完全自动化各阶段的特点,并对比了SAE与中国的智能汽车分级体系。
本文介绍了自动驾驶汽车的概念及其分级标准,详细解析了从驾驶支援到完全自动化各阶段的特点,并对比了SAE与中国的智能汽车分级体系。
本系列博客包括6个专栏,分别为:《自动驾驶技术概览》、《自动驾驶汽车平台技术基础》、《自动驾驶汽车定位技术》、《自动驾驶汽车环境感知》、《自动驾驶汽车决策与控制》、《自动驾驶系统设计及应用》,笔者不是自动驾驶领域的专家,只是一个在探索自动驾驶路上的小白,此系列丛书尚未阅读完,也是边阅读边总结边思考,欢迎各位小伙伴,各位大牛们在评论区给出建议,帮笔者这个小白挑出错误,谢谢!
此专栏是关于《自动驾驶技术概览》书籍的笔记。
3.自动驾驶概述
3.1定义及分级标准
自动驾驶汽车:那些可以在没有人类驾驶员帮助的情况下,感知外界环境、完成驾驶任务的汽车;
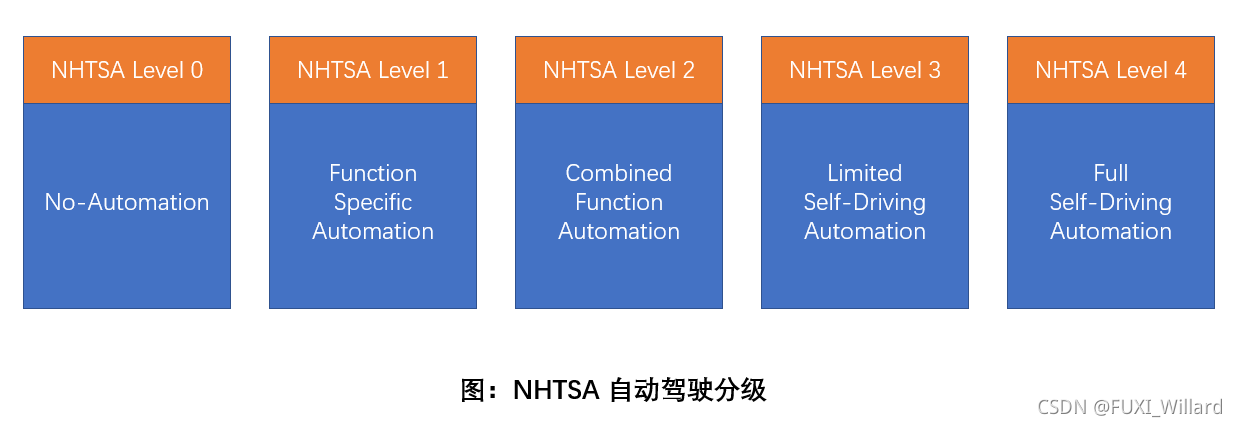
美国国家公路交通安全管理局(NHTSA,National Highway Traffic Safety Adminiatration)发布的自动驾驶汽车的分级标准。
- 具有特定功能的自动驾驶
该层次汽车具有一个或多个特殊自动驾驶功能;
如:电子稳定性控制(ESC)、自动紧急制动(AEB)等,车辆通过控制制动帮助驾驶员重新掌握车辆或更快地停车; - 具有复合功能的自动驾驶
该层次汽车具有将至少两个原始控制功能融合在一起实现的系统,完全不需要驾驶员对这些功能进行控制,但驾驶员需要一直对系统进行监视并准备在紧急情况时接管系统; - 具有限制条件的无人驾驶
该层次汽车能够在某个特定的驾驶交通环境下让驾驶员完全不用控制汽车,且可以自动检测环境的变化以判断是否返回驾驶员驾驶模式,驾驶员无须一直对系统进行监视; - 全工况无人驾驶
该层次系统完全自动控制车辆,全程检车交通环境,能够实现所有的驾驶目标,乘车人只需提供目的地或输入导航信息,在任何时候都不需要乘员对车辆进行操控;
SAE(SAE International,Society of Automative Engineers,国际自动机工程师学会)发布的自动驾驶汽车标准。
- 驾驶支援
通过驾驶环境对方向盘和加减速中的一项操作提供驾驶支持,其他驾驶动作都由人类驾驶员进行操作; - 部分自动化
通过驾驶环境对方向盘和加减速中的多项操作提供驾驶支持,其他的驾驶动作都由人类驾驶员进行操作; - 有条件自动化
由自动驾驶系统完成所有的驾驶操作,根据系统要求,人类驾驶员提供适当的应答; - 高度自动化
由自动驾驶系统完成所有的驾驶操作,根据系统要求,人类驾驶员不一定需要对所有的系统请求做出应答,车辆需行驶在限定道路和环境条件下; - 完全自动化
在所有人类驾驶员可以应付的道路和环境条件下,均可以由自动驾驶系统自主完成所有的驾驶操作;
3.2SAE J3016的自动驾驶级别划分
SAE International关于自动化层级的定义已经成为自动化/自动驾驶车辆的全球行业参照标准,用以评定自动驾驶技术级别。
- L0:驾驶员完全掌握车辆;
- L1:自动系统有时能够辅助驾驶员完成某些驾驶任务;
- L2:自动系统能够完成某些驾驶任务,但驾驶员需要监控驾驶环境,完成剩余部分,同时保证出现问题随时进行接管;
- L3:自动系统既能完成某些驾驶任务,也能在某些情况下监控驾驶环境,但驾驶员必须准备好重新取得驾驶控制权;
- L4:自动系统在某些环境和特定条件下,能够完成驾驶任务并监控驾驶环境;
- L5:自动系统在所有条件下都能完成所有驾驶任务;
(L1-L2级)驾驶辅助系统:车道保持辅助、自动泊车辅助、制动辅助、倒车辅助、行车辅助。
- 车道保持辅助系统:当汽车在行驶过程中偏离车道时,系统会首先向驾驶员发出预警信号;如果在一段时间内,驾驶员没有做出相应反应,汽车没有回到正常车道行驶的趋势,车道保持辅助系统会通过电子控制单元向车辆的转向执行器发出相应的转向命令,纠正车辆的行驶状态,使汽车回到正确的车道上,保证行车安全;
- 自动泊车辅助系统:辅助驾驶员进行泊车行为的智能辅助系统,可以有效解决驾驶员遇到的泊车难题,改善静态交通状态;自动泊车的关键技术:车位空间识别技术、路径规划与轨迹跟踪控制技术、EPS转角控制技术;
- 制动辅助系统:通过判断驾驶员的制动动作,在紧急制动时增加制动力度,将制动距离缩短;包括:电子制动辅助系统(Electronic Brake Assist,EBA)、制动力辅助系统(Brake Assist System,BAS);
- 倒车辅助系统:以图像、声音的直观形式告知驾驶员车与障碍物的相对位置,解除因后视镜存在盲区带来的困扰,为驾驶员倒车泊车提供方便,消除安全隐患;包括:红外线式、电磁感应式、超声波式、超声波与机器视觉配合式;
- 行车辅助系统:包括:行车警报类,如:车道偏离预警、盲点探测、前车碰撞预警、驾驶员疲劳监测;行车控制类,如:ACC自适应巡航、交通拥堵辅助;
L3-L5层级描述: 以动态驾驶任务(DDT)、DDT的任务支援、设计运行范围来分类;
- 动态驾驶任务(DDT,Dynamic Driving Task):指汽车在道路上行驶所需的所有实时操作和策略上的功能,不包括行程安排,目的地和途径地的选择等战略上的功能;
- 车辆执行:包括通过方向盘来对车辆进行横向运动操作、通过加速和减速来控制车辆的纵向运动;
- 感知和判断(OEDR,Object and Event Detection and Response):对车辆纵向运动方向操作、通过对物体和事件检测、认知归类和后续响应,达到对车辆周围环境的监测和执行对应操作、车辆运动的规划及对外界信息的传递;
- 动态驾驶任务支援(DDT Fallback):自动驾驶系统在设计时,需要考虑系统性的失效发生或发生超过系统原有的运行设计范围之外的情况,当两者发生的时候,需要给出最小化风险的解决路径;
- 设计运行域(Operational Design Domain,ODD):一组参数,指自动驾驶系统被设计起作用的条件及适用范围,对已知天气环境、道路情况、车速、车流量等信息做出测定,确保系统能力在安全环境内。
L3:有条件的自动化,要求在限定的ODD内能够完成所有的DDT,但驾驶员时刻准备应对,无人驾驶系统在系统失效或超出ODD范围时发出的需求驾驶员介入的请求;
L4:高度自动化,要求系统在ODD内不仅能完成DDT,还能应对系统失效,无需驾驶员介入;
L5:完全自动化,全工况无人驾驶,无须定义ODD,能够完成所有的DDT及处理DDT Fallback。
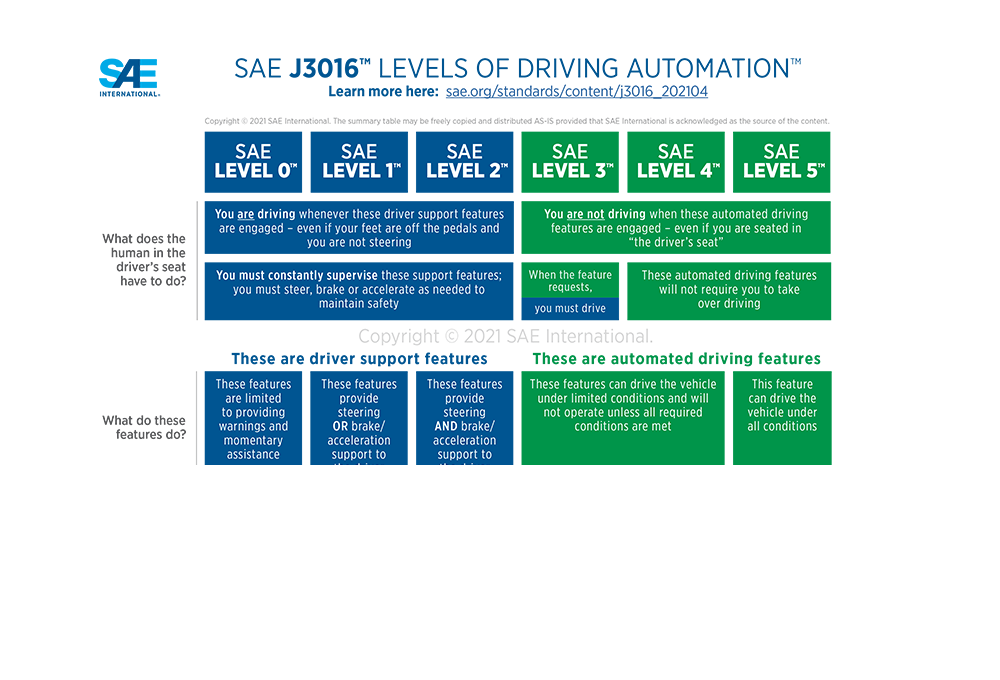
上图是2021年4月SAE发布的最新标准,SAE官网.
3.3 中国智能汽车等级划分
- 手动驾驶(MD):手动驾驶汽车;
- 驾驶辅助(DA):一项或多项局部自动功能,如:ESC、ACC、AEB,并能提供基于网联的智能信息提示;
- 半自动化(PA):在驾驶员短时间转移注意力仍可保持控制,失去控制10s以上予以提醒,并提供基于网联的智能引导信息;
- 高度自动化(HA):在高速公路和市区内部均可自动驾驶,偶尔需要驾驶员接管,但有充分的移交时间,并提供基于网联的智能控制信息;
- 完全自动化(FA):驾驶权完全交给车辆,允许驾驶员从事计算机工作,休息和睡眠等其他活动。
《中国制造2025》智能网联汽车产业发展目标:
- 到2020年,初步形成以企业为主体、市场为导向、政产学研用紧密结合、跨产业协同发展的智能网联汽车自主创新体系;汽车信息化产品自主份额达50%,DA、PA整车自主份额超过40%;
- 到2025年,基本建成自主的智能网联汽车产业链与智慧交通体系,汽车信息化产品自主份额达60%,DA、PA、HA整车自主份额达50%以上,实现汽车全生命周期的数字化,网络化,智能化,初步完成汽车产业转型升级。


















 779
779

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











