







##概述
永磁同步直线电机(PMLSM)直接产生直线运动,消除了旋转电机中间传动机构的弹性形变、过零间隙、摩擦等因素,但是传动系统的参数摄动、负载扰动、端部效应、齿槽效应、摩擦力等不确定线性因素未经衰减直接作用于电机,增加了控制上的难度。在精密加工制造领域等高端制造场合,高性能的指标需求与控制算法复杂性的矛盾,对永磁同步直线电机伺服系统的控制技术提出了更高的要求。
(1)传统控制技术。经典控制理论的发展,出现了PID控制、反馈控制、解耦控制、矢量控制技术等。传统控制技术要求控制对象模型确定、不变化且是线性的,不能满足日益复杂伺服系统的控制需求。因此,目前在高精度控制系统中大都与其他控制方法结合使用。
(2)现在控制技术。自适应控制、滑膜变结构控制、鲁棒控制、定量反馈理论等,对于鲁棒控制,要求输入必须是能量有限信号,而实际系统的干扰信号(突加负载产生的阶跃扰动、时变有界负载扰动等)一般不能满足H∞控制理论是平方可积的能量有界信号的假设,H∞控制的鲁棒稳定性和性能鲁棒性之间的矛盾需要进一步的研究。滑模变结构斗振问题还没有很好的解决方案。
(3)智能控制。模糊逻辑控制、神经网络控制等智能控制方法也被引入永磁直线电机伺服系统的控制。但是单纯的模糊控制需要较多的控制规则及工作经验,控制精度相对较低;神经网络智能控制系统还没有一个统一的控制系统设计方法,对于输入个数、网络层数、阈值的选取,且算法复杂不易实现。目前智能控制与现有的成熟的控制方法相结合,取长补短,可以实现PMLSM伺服系统的非线性和不确定性的辨识和控制,出现了神经网络PID、模糊逻辑PID、模糊滑模变结构等。
近年来,新型非线性控制系统的互联与能量成型方法受到高度重视,其主要特征是被控系统具有端口受控哈密顿结构,根据端口受控哈密顿系统特有的反馈镇定方法,便于分析非线性系统的控制器设计与稳定性分析。
Hamilton函数方法从能量的观点看待受控系统,可视为具有内部能量耗散与转换,并通过输入输出端口与外部环境进行能量交换的开放系统。能量平衡方程是Hamiltion函数方法完成系统分析和控制的基础。基于能量的Hamiltion函数方法能充分利用系统内在结构特点进行稳定性分析和控制器设计。通过将受控系统表示为耗散Hamiltion系统,可以用于表征系统总能量的Hamiltion函数作为Lyapunov函数完成稳定性分析。
结合等效简化模型与奇异摄动近似方法,Hamiltion函数法已在PMLSM的镇定和鲁棒控制研究中取得了一些成果。利用滑膜变结构控制解决系统参数不确定性与外部扰动问题,为消除滑模变结构控制带来的抖动,用含有平滑模切换律的滑膜控制策略,先后设计快变和慢变子系统的控制规律,再将两个子系统的控制律合成,得到PMLSM的复合控制效果。
##端口受控哈密顿系统数学基础
用Hamiltion函数表示的K维坐标架构下全激励欧拉-拉格朗日方程为:
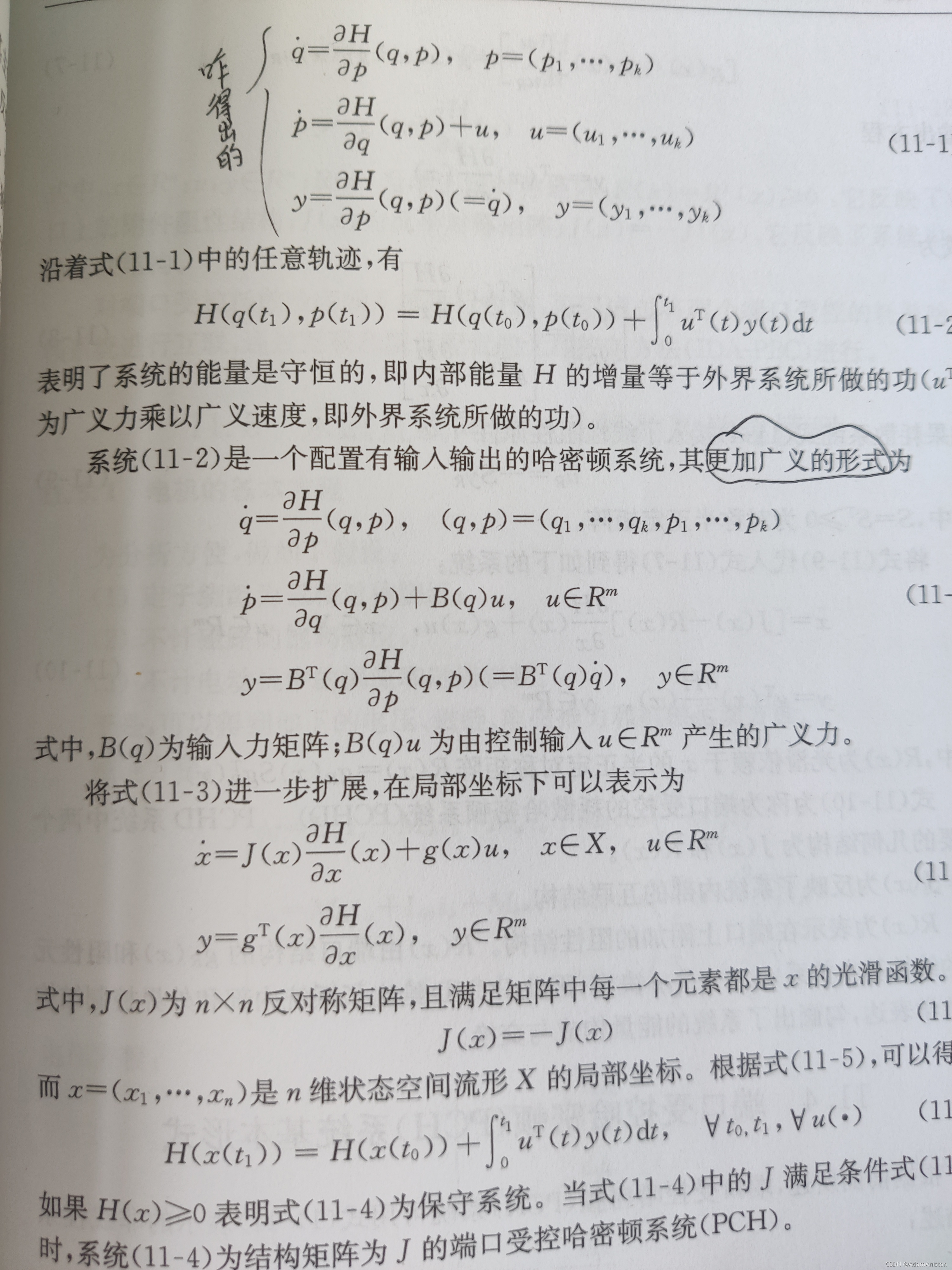
##端口受控耗散哈密顿系统
PCH系统的端口上有阻性元件,起到能量耗散的作用。因此,引入能量耗散的概念的PCH系统模型为:

##端口受控哈密顿(PCH)系统基本形式
将能量耗散的概念引入PCH系统中,可得到耗散的PCH模型如下:
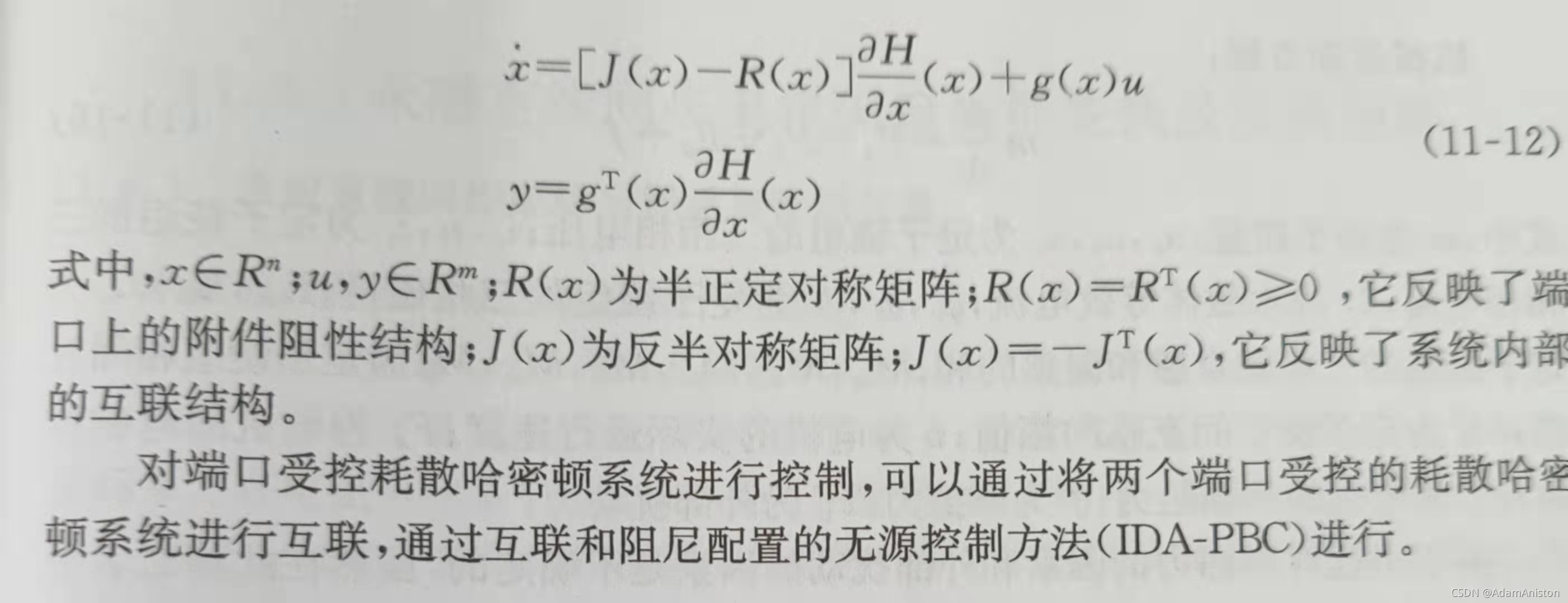
对端口受控耗散哈密顿系统进行控制,可以通过将两个端口受控的耗散哈密顿系统进行互联,通过互联和阻尼配置的无源控制方法(IDA-PBC)进行。

















 1023
1023

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









