







SIFT
参考链接1
参考链接2,更详细
Sift提取图像的局部特征,在尺度空间寻找极值点,并提取出其位置、尺度、方向信息。
Sift特征的特点:
- 对旋转、尺度缩放、亮度变化保持不变性,对视角变化、噪声等也存在一定程度的稳定性;
- 独特性,信息量丰富,适用于在海量特征数据中进行快速,准确的匹配;
- 多量性,即使少数几个物体也可以产生大量的Sfit特征向量;
- 可扩展性,可以很方便的与其他形式的特征向量进行联合;
Sfit特征提取和匹配具体步骤:
- 生成高斯差分金字塔( DOG金字塔),尺度空间构建
- 空间极值点检测(关键点的初步查探):图像空间和尺度空间局部极值点
- 稳定关键点的精确定位
- 稳定关键点方向信息分配:领域点梯度方向直方图取峰值作为主方向,80%峰值作为辅方向(增强匹配鲁棒性)
- 关键点描述
- 特征点匹配

对每个关键点,采用448共128维向量的描述子进项关键点表征,综合效果最佳。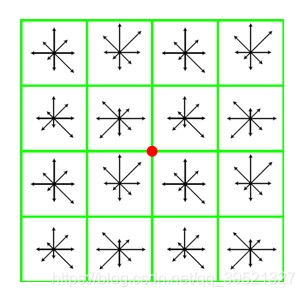
FAST
FAST算子比其它角点检测算法都快,但是当图像中的噪点较多时,它的健壮性并不好,而且算法的效果还依赖于阈值。并且FAST算子不产生多尺度特征而且FAST角点没有方向信息,这样就会失去旋转不变性。
fast的经典论文:“Machine Learning for High-speed Corner Detector”,ECCV2006。
参考链接1
参考链接2
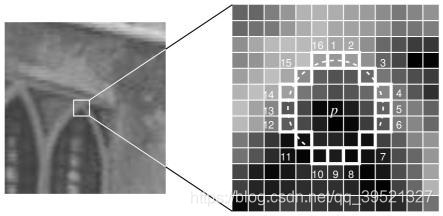
- 在图像中选取一个像素点,来判断它是否为关键点。表示像素点的灰度值。
- 选择适当的阈值。
- 在像素点的周围选择16个像素点进行测试。
- 如果在这16个像素点中存在个连续像素点的灰度值都高于,或者低于,那么像素点被认为是一个角点。如上图中的虚线所示,选取的值为12。
- 一种更加快的改进是首先检测像素点周围的四个点(1,5,9,13)中是否有三个点满足阈值要求。如果不满足,则直接跳过,如果满足,则继续使用前面的算法,全部判断16个点中是否有12个满足条件。
fast方向:对图像块来说,零阶矩和一阶矩可确定中心,二阶矩可确定方向。
SURF
参考链接:内置很多论文及资料链接
SURF角点检测算法是对SIFT的一种改进,主要体现在速度上,效率更高。它和SIFT的主要区别是图像多尺度空间的构建方法不同。
在计算视觉领域,尺度空间被象征性的表述为一个图像金字塔,向下降采样一般用高斯金字塔。其中,输入图像函数反复与高斯函数的核卷积并反复对其进行二次抽样,这种方法主要用于SIFT算法的实现,但每层图像依赖于原图像,并且图像需要重设尺寸,因此,这种计算方法运算量较大。
SURF算法对积分图像进行操作,卷积只和前一幅图像有关,其降采样的方法是申请增加图像核的尺寸,这也是SIFT算法与SURF算法在使用金字塔原理方面的不同。SURF算法允许尺度空间多层图像同时被处理,不需对图像进行二次抽样,从而提高算法性能。
ORB(Oriented FAST and Rotated BRIEF)
参考链接
ORB特征是将FAST特征点的检测方法与BRIEF特征描述子结合起来,并在它们原来的基础上做了改进与优化。据说ORB算法的速度是sift的100倍,是surf的10倍。
BRIEF算法计算出来的是一个二进制串的特征描述符。它是在一个特征点的邻域内,选择n对像素点pi、qi(i=1,2,…,n)。然后比较每个点对的灰度值的大小。如果I(pi)> I(qi),则生成二进制串中的1,否则为0。所有的点对都进行比较,则生成长度为n的二进制串。一般n取128、256或512(opencv默认为256)。描述子特有的2进制串的表现形式不仅节约了存储空间,而且大大缩短了匹配的时间。
将二进制串进行异或操作可比较描述符的相似性。
LBP,LBPH(Local Binary PatternsHistograms)
局部二进制编码直方图,建立在LBPH基础之上的人脸识别法基本思想如下:首先以每个像素为中心,判断与周围像素灰度值大小关系,对其进行二进制编码,从而获得整幅图像的LBP编码图像;再将LBP图像分为grayx*grayy个区域,获取每个区域的LBP编码直方图,继而得到整幅图像的LBP编码直方图,通过比较不同人脸图像LBP编码直方图达到人脸识别的目的,其优点是不会受到光照、缩放、旋转和平移的影响。
Sobel
参考链接
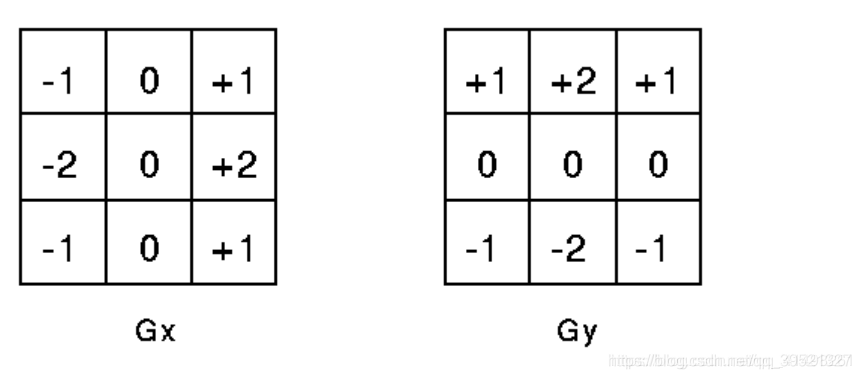
Sobel算子是一种常用的边缘检测算子,是一阶的梯度算法,结合了高斯平滑与微分运算,抗噪声能力很强。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量。
用户可以设定求导方向,水平或者垂直(通过参数yorder和xorder)。也可以指定卷积核大小,通过参数ksize。如果ksize=-1,那么一个3*3的scharr滤波器会被使用,该滤波器会得到比Sobel滤波器更好的效果。
卷积因子:
HOG
参考链接
HOG方法是基于对稠密网格中归一化的局部方向梯度直方图的计算,基于边缘,对几何和光学变化都有很好的不变性。计算得到的HOG特征向量中隐含了该块与检测窗口之间的空间位置关系。
HOG有个优点,提取的边缘和梯度特征能很好的抓住局部形状的特点,且因是对图像做了Gamma校正和采用cell方式进行梯度方向量化,在局部进行提取,所以对几何和光学变化都有很好的不变性,变换或旋转对于足够小的区域影响很小。对于行人检测,在粗糙空域采样(coarse spatial sampling)、精细方向采样(fine orientation sampling)和强局部灰度归一化(strong local photometric normalization)这些条件下,只要行人大体上能够保持直立的姿势,就容许有一些细微的肢体动作,这些细微的动作可以被忽略而不影响检测效果。














 1882
1882











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









