







参考与前言
Last edited time: August 3, 2022 10:04 AM
Status: Reading
Type: TRO
Year: 2021
论文链接:https://ieeexplore.ieee.org/document/9302873
1. Motivation
safe motion planning对自动驾驶很重要,其中online verification 能保证自动驾驶车辆不会出现事故,但是现有的方法存在下列缺点:
- online verification并不高效,一般需要20HZ或更高的频率
- 在一些极端的情况下 全时间段内不能完全避免碰撞
- 在不安全场景,大多方法都缺少提供alternative motion plans
Related work
因聪明需要 所以总结了一下,感兴趣可看,大致了解一下无人车的规划相关工作
trajectory planning
discrete planning比较受欢迎,主要是离散化搜索空间、状态和输入空间等,motion primitives主要就是提前计算好轨迹快,然后通过search-based方案concatenaated到一起,这一步骤通常是offline的,所以可以应用于较为复杂的车辆模型,比如multibody modesl[19]
OS: 估计是将轨迹点预录下来的形式,或者建完图后有free的全局轨迹点 搜素空间
- Sampling-based: RRT为主的,比较适合高维的搜索空间,但是由于随机采样,通常无法在时间内获得optimal motion
- Graph-search: 比如state lattices,同属discrete planning。获取一系列轨迹,其goal states是预定义好的grid上的点,使用 lattice 结构表示。state lattices使用了优化来实现jerk-optimal。通常lattices能构建 可行驶的轨迹,但是 due to grid, it lack optimality and completeness
虽然discrete planning是比较容易实现并有效的解决motion问题的,但是缺点也很明显:也正是因为离散,所以可能在safety-critical scenarios with small and convoluted solution spaces 无法求解;同样的原因 也会导致在fail to determine trajectories ending in small safe terminal sets
故连续的model predictive control通过minimizing cost function 来生成无碰撞的轨迹,比如混合整数优化、sequential quadratic programs;因为求解的问题通常是非凸的,所以求解起来较为困难无法做到实时性;另一个则是可能造成local minimal
通常可以把非凸问题转成凸问题,比如线性化 vehicle dynamics,将motion分为横向和纵向的;[47]-[51] 说明了这一方法可以在全局收敛的情况下有效解决优化问题;但因为方法上分横纵,可能导致无法在复杂场景下获得可行轨迹。我们通过focusing on simple evasive maneuvers and providing safe fallback solutions来解决这一问题 → 对应Section VI.
safety verification
In theorem proving, desired system properties are formulated using logical formulas,然后verification步骤主要是checking the satisfiability of the logical formulas
如果从未进入inevitable collision states 则认为是安全的,ICS是一种状态:所有车辆自身可能的轨迹都会和障碍物相撞,ICS reason over infinite time horizons,在随机的交通场景 确定ICS是比较耗时的,大部分工作为提高效果,仅考虑其他参与者的一条轨迹。
为补充ICS,controlled invariant sets 保证了persistent feasibility,根据定义就是根据其他参与者,如果在CIS内的每个状态都存在一个无碰撞轨迹,则说明车辆是安全的。因为对障碍物未来状态的未知,计算CIS在动态环境中比较challenging
Set-based reachability analysis 通过计算所有的feasible轨迹,检查是否存在无碰撞轨迹;但是这一方法中,因为对未来所有的可能状态进行考虑,unsafe regions may grow rapidly。 导致的结果就是 刚规划的轨迹会被人为potentially unsafe,leaving AV without a safe trajectory. 在本篇文章中,我们通过结合fail-safe planning来结合reachable sets在verficiation中以解决这一问题
responsibility-sensible safety RSS 也是一种formal safety model
Contribution
主要贡献是展示了一种 verification technique 来保证车辆的安全性 弥补上面提到的以下不足,从上面抽取出来的:
- 相关规划在方法上分横纵,可能导致无法在复杂场景下获得可行轨迹。本文通过focusing on simple evasive maneuvers and providing safe fallback solutions来解决这一问题 → 对应Section VI.
- 计算CIS在动态环境中比较challenging
- 因为对未来所有的可能状态进行考虑,unsafe regions may grow rapidly。 导致的结果就是 刚规划的轨迹会被人为potentially unsafe,leaving AV without a safe trajectory
2. Method
首先定义了问题,及 相关sets,这一部分有点多,建议看原文,主要是介绍所有变量的意义等,定义了set Z R^1 是自车的possible disturbances z,运动的微分公式为:
x ˙ ( t ) = f ( x ( t ) , u ( t ) , z ( t ) ) . \begin{equation*} \dot{x}(t) = f\left(x(t),u(t),z(t)\right). \tag{1} \end{equation*} x˙(t)=f(x(t),u(t),z(t)).(1)
使用 χ ( t h , x ( t 0 ) , u ( [ t 0 , t h ] ) ) \chi\left(t_{h}, x\left(t_{0}\right), u\left(\left[t_{0}, t_{h}\right]\right)\right) χ(th,x(t0),u([t0,th])) 来表示 此公式的解,也就是满足motion下的轨迹集合
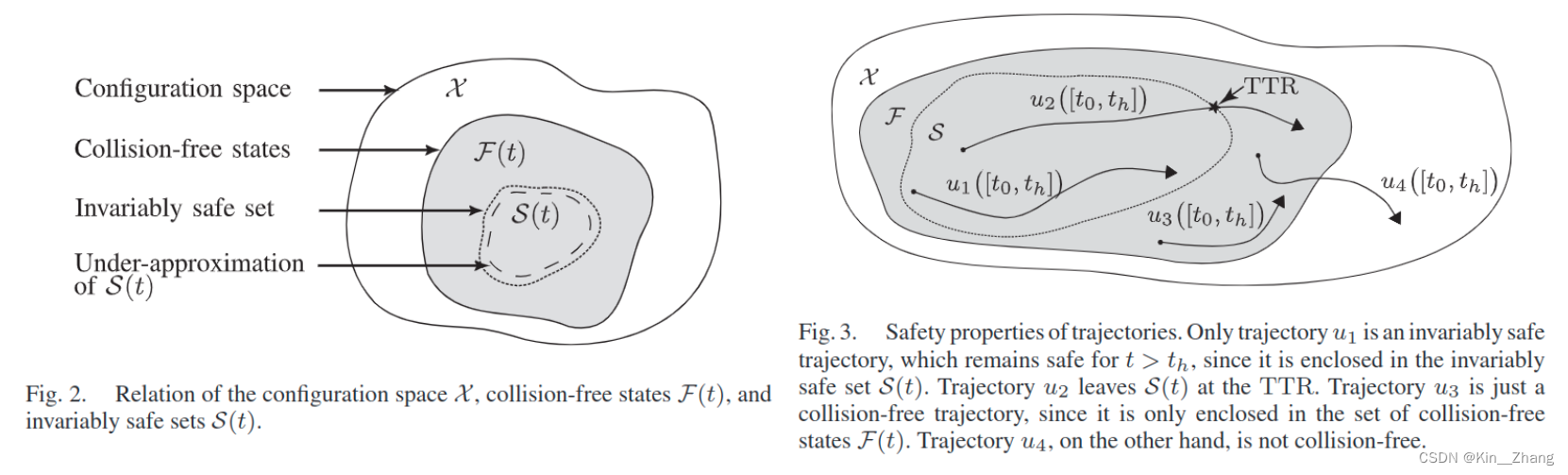
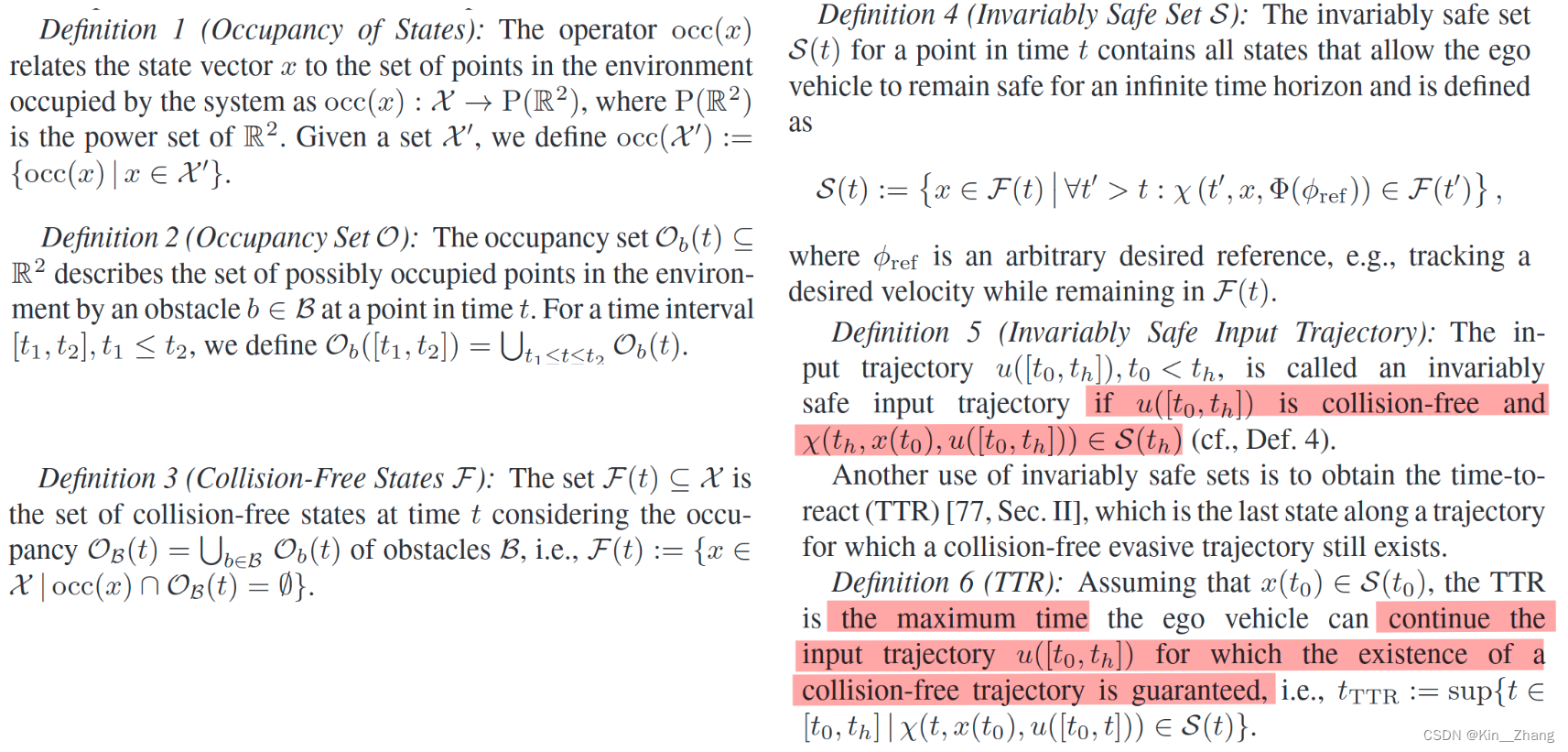
在他们之前的工作中有提到[68],为计算 S ( t ) \mathcal S(t) S(t),我们遵循一下规定:
- Formal safe distances[79]:不管前方车辆状态如何 包括前方车辆急刹等情况;在这个距离下,我们总是能刹停下来
- Evasive distances[80]:这个距离下 即使前方车辆急刹,我们也可以通过向相邻车道转向来避免碰撞
后面ab给我解释,两公式用了点时间,首先有个条件:
( ∣ a s,max,b ∣ < ∣ a s,max ∣ ) ∧ ( v b ∗ < v ego ) ∧ ( v e g o ∣ a s , m a x ∣ < v b ∗ ∣ a s , m a x , b ∣ ) , \begin{align*} & \left(|a_{\text{s,max,b}}| < |a_{\text{s,max}}| \right)\wedge \left(v^*_b < v_\text{ego} \right)\wedge\left(\frac{v_{\mathrm{ego}}}{|a_{\mathrm{s,max}}|} < \frac{v_b^*}{|a_{\mathrm{s,max,b}}|}\right), \tag{2} \end{align*} (∣as,max,b∣<∣as,max∣)∧(vb∗<vego)∧(∣as,max∣vego<∣as,max,b∣vb∗),(2)
如果满足这个条件,那么安全距离为:
Δ s a f e , 1 ( v e g o , b ) : = ( v b − ∣ a s,max,b ∣ δ b r a k e − v ego ) 2 − 2 ( ∣ a s,max,b ∣ − ∣ a s,max ∣ ) + v ego δ b r a k e − v b δ b r a k e + 1 2 ∣ a s,max,b ∣ δ b r a k e 2 \begin{align*} \Delta _{\mathrm{safe,1}}(v_{\mathrm{ego}},b):=&\frac{(v_b-|a_{\text{s,max,b}}|\delta _{\mathrm{brake}}-v_\text{ego})^2}{-2(|a_{\text{s,max,b}}|-|a_{\text{s,max}}|)}+v_\text{ego}\delta _{\mathrm{brake}}-v_b\delta _{\mathrm{brake}}+\frac{1}{2}|a_{\text{s,max,b}}|\delta _{\mathrm{brake}}^2\end{align*} Δsafe,1(vego,b):=−2(∣as,max,b∣−∣as,max∣)(vb−∣as,max,b∣δbrake−vego)2+vegoδbrake−vbδbrake+21∣as,max,b∣δbrake2
其中前面是一个整体 即 ( v − 0 ) 2 2 a \frac{(v-0)^2}{2a} 2a(v−0)2;后面是另一个整体 在反应时间内的行驶相对距离 即 0 + v t + 1 2 a t 2 0+vt+\frac{1}{2}at^2 0+vt+21at2
否则安全距离为: 即大家都以最大加速度减到速度为0的时候,外加一个自车的反应时间
Δ s a f e , 2 ( v e g o , b ) : = v b 2 − 2 ∣ a s,max,b ∣ − v ego 2 − 2 ∣ a s,max ∣ + v ego δ b r a k e . \Delta _{\mathrm{safe,2}}(v_{\mathrm{ego}},b):=\frac{v_b^2}{-2|a_{\text{s,max,b}}|}-\frac{v_\text{ego}^2}{-2|a_{\text{s,max}}|} + v_\text{ego}\delta _{\mathrm{brake}}. Δsafe,2(vego,b):=−2∣as,max,b∣vb2−−2∣as,max∣vego2+vegoδbrake.
2.2 Safe& Evasive Distance Set
safe distance set
分横纵向考虑安全距离,纵向距离在[81,82] 二文中有详细考虑与证明:
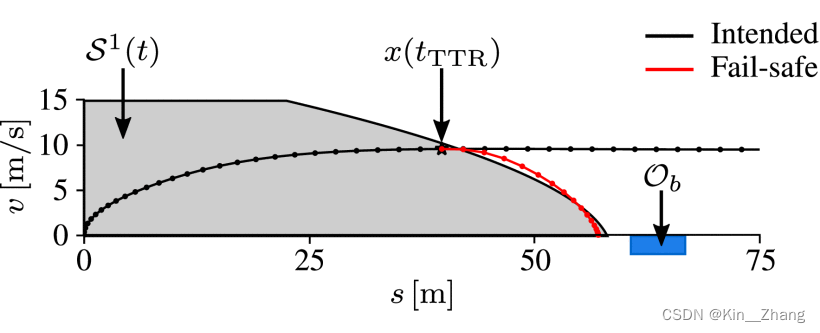
S 1 ( t ) = { ( s , d , v ) T ∈ X ∣ ∀ ( s b , d b ) T ∈ O b , c l s ( t ) : s ≤ s b − Δ s a f e , 2 ( v , b ) } \mathcal{S}^{1}(t)=\left\{(s, d, v)^{T} \in \mathcal{X} \mid \forall\left(s_{b}, d_{b}\right)^{T} \in \mathcal{O}_{b, \mathrm{cls}}(t): s \leq s_{b}-\Delta_{\mathrm{safe}, 2}(v, b)\right\} S1(t)={(s,d,v)T∈X∣∀(sb,db)T∈Ob,cls(t):s≤sb−Δsafe,2(v,b)}
而这里主要解释横向的evasive distance [感觉翻译成逃逸 逃离距离都不太好 所以就用原文把],首先引入 d e v a d_{\mathrm{eva}} deva 作为车辆完全换道所需的横向距离,a为横向加速度
t e v a : = 2 d e v a a d , m a x + δ s t e e r (5) t_{\mathrm{eva}}:= \sqrt{\frac{2d_{\mathrm{eva}}}{a_{\mathrm{d,max}}}} + \delta _{\mathrm{steer}}\tag{5} teva:=ad,max2deva+δsteer(5)
同时考虑前方车辆在这个时间内的行驶距离(纵)
Δ s b : = v b t b − 1 2 ∣ a s , m a x , b ∣ t b 2 t b : = min ( t e v a , v b ∣ a s , m a x , b ∣ ) . (6) \begin{split} \Delta s_b &:= v_bt_b-\frac{1}{2}|a_{\mathrm{s,max,b}}|t_b^2\\ t_b&:= \min (t_{\mathrm{eva}},\frac{v_b}{|a_{\mathrm{s,max,b}}|}). \end{split} \tag{6} Δsbtb:=vbtb−21∣as,max,b∣tb2:=min(teva,∣as,max,b∣vb).(6)
evasive distance set
定义如下,证明在[80]
S 2 ( t ) = { ( s , d , v ) T ∈ X ∣ ∀ ( s b , d b ) T ∈ O b , c l s ( t ) : s ≤ s b − Δ eva t ( v , b ) } \mathcal{S}^{2}(t)=\left\{(s, d, v)^{T} \in \mathcal{X} \mid \forall\left(s_{b}, d_{b}\right)^{T} \in \mathcal{O}_{b, \mathrm{cls}}(t): s \leq s_{b}-\Delta_{\text {eva }}^{t}(v, b)\right\} S2(t)={(s,d,v)T∈X∣∀(sb,db)T∈Ob,cls(t):s≤sb−Δeva t(v,b)}
Underapproximation of S
即前两者的set取并集,得到S
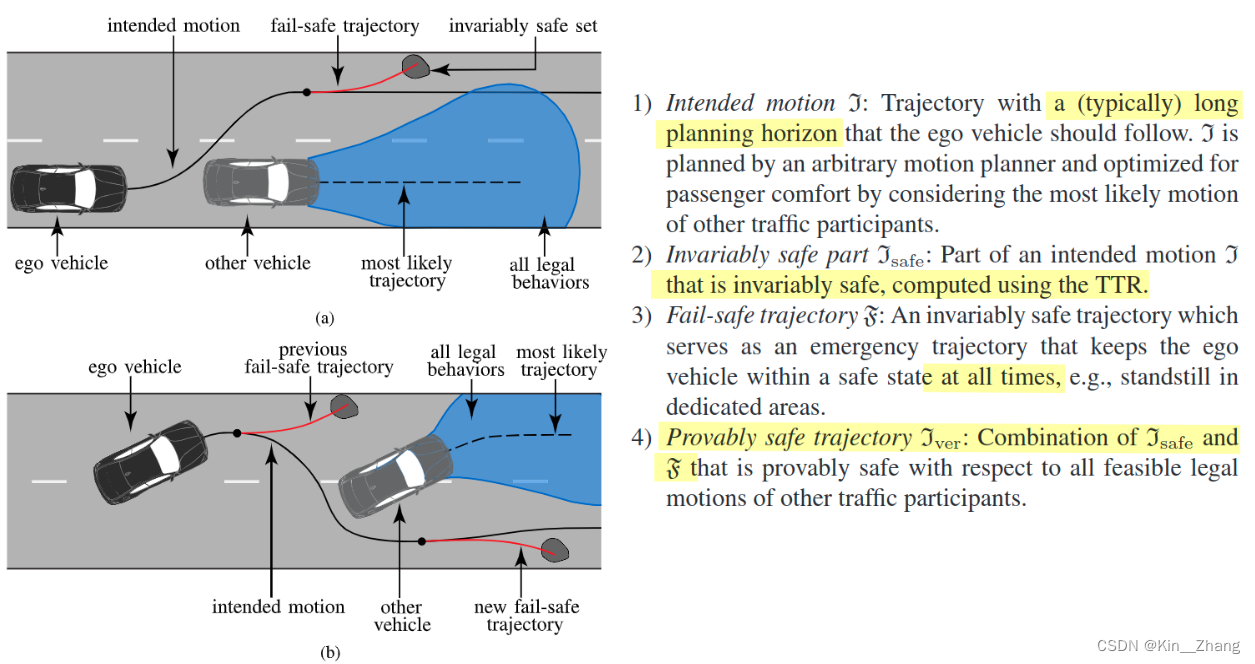
2.3 生成fail-safe Trajectories
纵向 Longitudinal Motion
首先是 纵向运动公式表示: x lon = ( s , v , a , j ) T x_{\text {lon }}=(s, v, a, j)^{T} xlon =(s,v,a,j)T,纵向距离、速度、加速度、jerk;我们使用加加速度作为input,将车辆纵向运动描述为linear time-invariant system
d 4 d t 4 s ( t ) = u l o n ( t ) . \begin{equation*} \frac{d^4}{dt^4}s(t)=u_{\mathrm{lon}}(t). \tag{8} \end{equation*} dt4d4s(t)=ulon(t).(8)
然后加入约束,a 纵向前后的车辆距离,b 车辆本身的最大小 速度、加速度和jerk
s m i n ( t ) ≤ x l o n ( 0 ) ( t ) ≤ s m a x ( t ) v m i n ≤ x l o n ( 1 ) ( t ) ≤ v m a x a m i n ≤ x l o n ( 2 ) ( t ) ≤ a m a x j m i n ≤ x l o n ( 3 ) ( t ) ≤ j m a x \begin{align*} s_{\mathrm{min}}(t) \leq &x_{\mathrm{lon}}^{(0)}(t) \leq s_{\mathrm{max}}(t)\\ v_{\mathrm{min}}\leq &x_{\mathrm{lon}}^{(1)}(t) \leq v_{\mathrm{max}}\\ a_{\mathrm{min}}\leq &x_{\mathrm{lon}}^{(2)}(t) \leq a_{\mathrm{max}}\\ j_{\mathrm{min}}\leq &x_{\mathrm{lon}}^{(3)}(t) \leq j_{\mathrm{max}} \tag{10} \end{align*} smin(t)≤vmin≤amin≤jmin≤xlon(0)(t)≤smax(t)xlon(1)(t)≤vmaxxlon(2)(t)≤amaxxlon(3)(t)≤jmax(10)
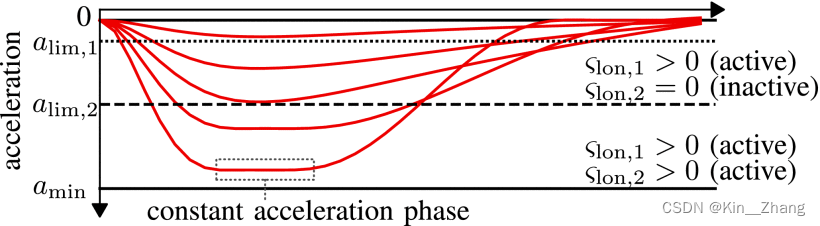
我们演示了刹车,但是因为是>0的加速度,所以此处我们引入两个deceleration limits a min < a lim , 2 < a lim , 1 < 0 a_{\min }<a_{\lim , 2}<a_{\lim , 1}<0 amin<alim,2<alim,1<0,其中 ς l o n , 1 , ς l o n , 2 ≥ 0 \varsigma _{\mathrm{lon},1},\varsigma _{\mathrm{lon},2}\geq0 ςlon,1,ςlon,2≥0 是slack variables 松弛约束 (JG: 优化的小trick 可以加速 更容易求解)
x l o n ( 2 ) ( t ) ≥ a l i m , 1 − ς l o n , 1 x l o n ( 2 ) ( t ) ≥ a l i m , 2 − ς l o n , 2 . \begin{align*} x_{\mathrm{lon}}^{(2)}(t)&\geq a_{\mathrm{lim},1} - \varsigma _{\mathrm{lon},1}\\ x_{\mathrm{lon}}^{(2)}(t)&\geq a_{\mathrm{lim},2} - \varsigma _{\mathrm{lon},2}. \tag{11} \end{align*} xlon(2)(t)xlon(2)(t)≥alim,1−ςlon,1≥alim,2−ςlon,2.(11)
纵向的cost
J l o n ( x ( t ) , u ( t ) ) = w a x l o n ( 2 ) ( t ) 2 + w j x l o n ( 3 ) ( t ) 2 + w ς 1 ς l o n , 1 + w ς 2 ς l o n , 2 2 . \begin{align*} J_{\mathrm{lon}}\left(x(t),u(t)\right) =&\,w_ax_{\mathrm{lon}}^{(2)}(t)^2+w_jx_{\mathrm{lon}}^{(3)}(t)^2+w_{\varsigma _1}\varsigma _{\mathrm{lon},1}+w_{\varsigma _2}\varsigma _{\mathrm{lon},2}^2. \tag{12} \end{align*} Jlon(x(t),u(t))=waxlon(2)(t)2+wjxlon(3)(t)2+wς1ςlon,1+wς2ςlon,22.(12)
横向 Lateral Motion
同理 横向运动表示: x lat = ( d , θ , κ , κ ˙ ) T x_{\text {lat }}=(d, \theta, \kappa, \dot{\kappa})^{T} xlat =(d,θ,κ,κ˙)T,沿frenet坐标系下的离参考线的横向距离、orientation、曲率、自车曲率的变化
横向的运动描述为下列13公式,其中 u l a t ( t ) = κ ¨ ( t ) u_{\mathrm{lat}}(t)=\ddot \kappa(t) ulat(t)=κ¨(t) 来源于 time-invariant linear
x ˙ l a t = ( 0 v ( t ) 0 0 0 0 v ( t ) 0 0 0 0 1 0 0 0 0 ) x l a t ( t ) + ( 0 0 0 1 ) u l a t ( t ) + ( − v ( t ) 0 0 0 ) z l a t ( t ) . \begin{align*} \dot{x}_{\mathrm{lat}} =& \begin{pmatrix}0&v(t)&0&0\\ 0&0&v(t)&0\\ 0&0&0&1 \\ 0&0&0&0 \\ \end{pmatrix}x_{\mathrm{lat}}(t) + \begin{pmatrix}0\\ 0\\ 0\\ 1 \end{pmatrix}u_{\mathrm{lat}}(t)\\ &+ \begin{pmatrix}-v(t)\\ 0\\ 0\\ 0 \end{pmatrix}z_{\mathrm{lat}}(t). \tag{13} \end{align*} x˙lat=⎝ ⎛0000v(t)0000v(t)000010⎠ ⎞xlat(t)+⎝ ⎛0001⎠ ⎞ulat(t)+⎝ ⎛−v(t)000⎠ ⎞zlat(t).(13)
对于collision free 将车辆看做三个圆,每个圆离参考线的距离可以用下列公式表示
d i = d + i − 1 2 ℓ sin ( θ − θ Γ ) ≈ d + i − 1 2 ℓ ( θ − θ Γ ) . \begin{equation*} d_i = d + \frac{i-1}{2}\ell \sin (\theta -\theta _\Gamma)\approx d+\frac{i-1}{2}\ell (\theta -\theta _\Gamma). \tag{14} \end{equation*} di=d+2i−1ℓsin(θ−θΓ)≈d+2i−1ℓ(θ−θΓ).(14)
再加上一系列的和纵向类似的约束,就不在此赘述了
横向的cost function:
J l a t ( x ( t ) , u ( t ) ) = w d x l a t ( 0 ) ( t ) 2 + w θ ( x l a t ( 1 ) ( t ) − θ Γ ( t ) ) 2 + w κ x l a t ( 2 ) ( t ) 2 + w κ ˙ x l a t ( 3 ) ( t ) 2 . \begin{equation*} \begin{split} J_{\mathrm{lat}}\left(x(t),u(t)\right) =&\,w_d x_{\mathrm{lat}}^{(0)}(t)^2+w_\theta \left(x_{\mathrm{lat}}^{(1)}(t)-\theta _\Gamma (t)\right)^2\\ &+w_\kappa x_{\mathrm{lat}}^{(2)}(t)^2+w_{\dot{\kappa }}x_{\mathrm{lat}}^{(3)}(t)^2. \end{split} \tag{18} \end{equation*} Jlat(x(t),u(t))=wdxlat(0)(t)2+wθ(xlat(1)(t)−θΓ(t))2+wκxlat(2)(t)2+wκ˙xlat(3)(t)2.(18)
生成Fail-Safe
首先是根据TTR生成初始状态,再由初始状态去计算接下来的fail-safe轨迹
下列公式中 Δ c o r \Delta_{cor} Δcor为由车辆中心到后轴中心的距离修正项, s m i n ≤ s ≤ s m a x s_{min}\leq s \leq s_{max} smin≤s≤smax
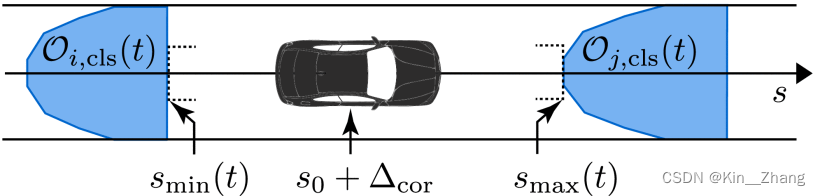
s m i n ( t ) = sup { s − Δ c o r ∣ ∀ b ∈ B f o l : s − Δ c o r < s 0 ∧ ( s , d ) T ∈ O b , c l s ( t ) } . \begin{equation*} \begin{split} s_{\mathrm{min}}(t) = \sup \left\lbrace s-\Delta _{\mathrm{cor}}\,|\,\forall b \in \mathcal {B}_{\mathrm{fol}}: s-\Delta _{\mathrm{cor}}< s_0\right.\\ \left.\wedge (s,d)^T\in \mathcal {O}_{b,\mathrm{cls}}(t)\right\rbrace . \end{split} \tag{20} \end{equation*} smin(t)=sup{s−Δcor∣∀b∈Bfol:s−Δcor<s0∧(s,d)T∈Ob,cls(t)}.(20)
s m a x ( t ) = inf { s − Δ c o r ∣ ∀ b ∈ B p r e : s − Δ c o r > s 0 ∧ ( s , d ) T ∈ O b , c l s ( t ) } . \begin{equation*} \begin{split} s_{\mathrm{max}}(t) = \inf \left\lbrace s-\Delta _{\mathrm{cor}}\,|\,\forall b \in \mathcal {B}_{\mathrm{pre}}:s-\Delta _{\mathrm{cor}}>s_0\right.\\ \wedge \left.(s,d)^T\in \mathcal {O}_{b,\mathrm{cls}}(t)\right\rbrace . \end{split} \tag{19} \end{equation*} smax(t)=inf{s−Δcor∣∀b∈Bpre:s−Δcor>s0∧(s,d)T∈Ob,cls(t)}.(19)
整体生成流程:
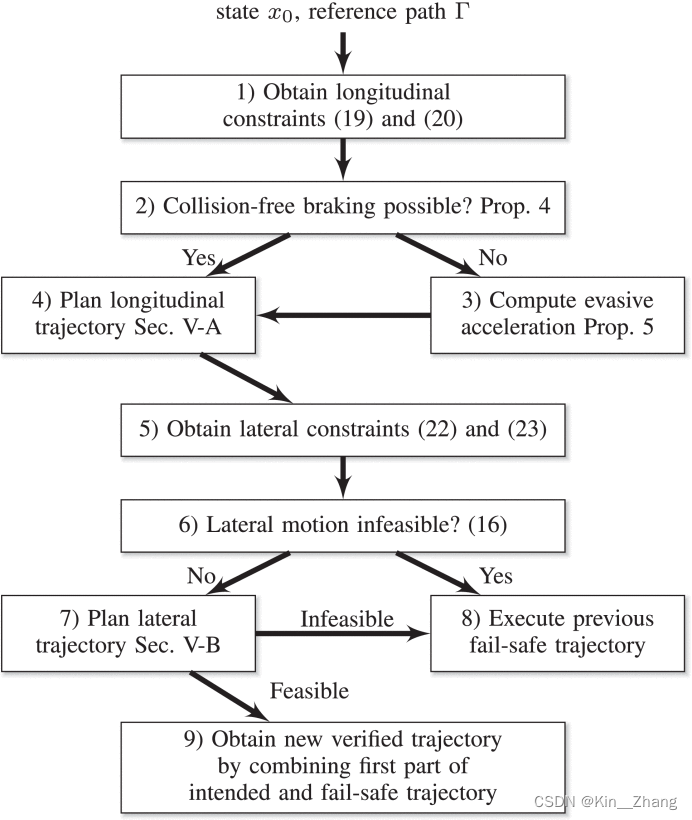
collision avoidance through braking
在初始状态下 能够紧急刹停的条件:Proposition 4
∀ t ∈ [ t 0 , t h ] : s 0 + v 0 ( τ ) − 1 2 ∣ a m a x ∣ max ( τ − δ b r a k e , 0 ) 2 ≤ s m a x ( t ) , τ : = min ( t , v 0 ∣ a m a x ∣ + δ b r a k e ) . \begin{equation*} \begin{split} \forall t\in [t_0,t_h]: &\,s_0+v_0(\tau)-\frac{1}{2}|a_{\mathrm{max}}| \max (\tau -\delta _{\mathrm{brake}},0)^2 \\ &\leq s_{\mathrm{max}}(t), \tau :=\min (t,\frac{v_0}{|a_{\mathrm{max}}|}+\delta _{\mathrm{brake}}). \end{split} \end{equation*} ∀t∈[t0,th]:s0+v0(τ)−21∣amax∣max(τ−δbrake,0)2≤smax(t),τ:=min(t,∣amax∣v0+δbrake).
如果碰撞一定会发生,那么guaranteed Time-To-Collision是:
t G T T C : = argmin t ∈ [ 0 , t h ] ∣ ( s 0 + v 0 t ) − s m a x ( t ) ∣ . \begin{equation*} t_{\mathrm{GTTC}}:= \text{argmin}_{t\in [0,t_h]} \big |(s_0+v_0t) - s_{\mathrm{max}}(t)\big |. \end{equation*} tGTTC:=argmint∈[0,th]∣ ∣(s0+v0t)−smax(t)∣ ∣.
Evasice Acceleration可以由此表示:Proposition 5
a e v a = 2 ( d e v a − ∣ v l a t ∣ t G T T C ) ( t G T T C − δ s t e e r ) 2 . \begin{equation*} a_{\mathrm{eva}}= \frac{2\left(d_{\mathrm{eva}}-|v_{\mathrm{lat}}|t_{\mathrm{GTTC}}\right)}{(t_{\mathrm{GTTC}}-\delta _{\mathrm{steer}})^2}. \end{equation*} aeva=(tGTTC−δsteer)22(deva−∣vlat∣tGTTC).
需要满足的距离曲线 示意
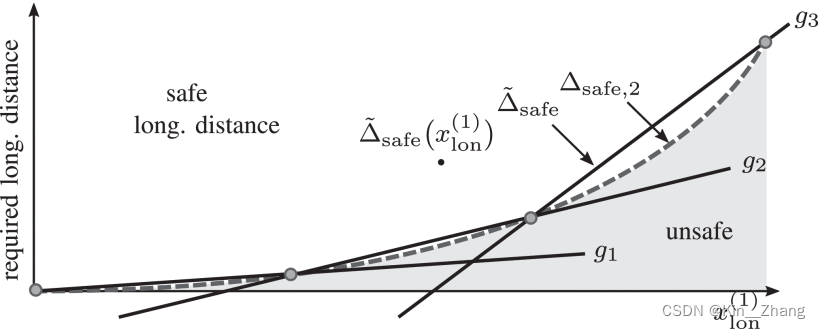
使用h段g的函数去近似安全距离 Δ s a f e ∈ { Δ s a f e , 1 , Δ s a f e , 2 } \Delta_{safe}\in\{\Delta_{safe,1},\Delta_{safe,2}\} Δsafe∈{Δsafe,1,Δsafe,2} 然后分速度区间去得到h段
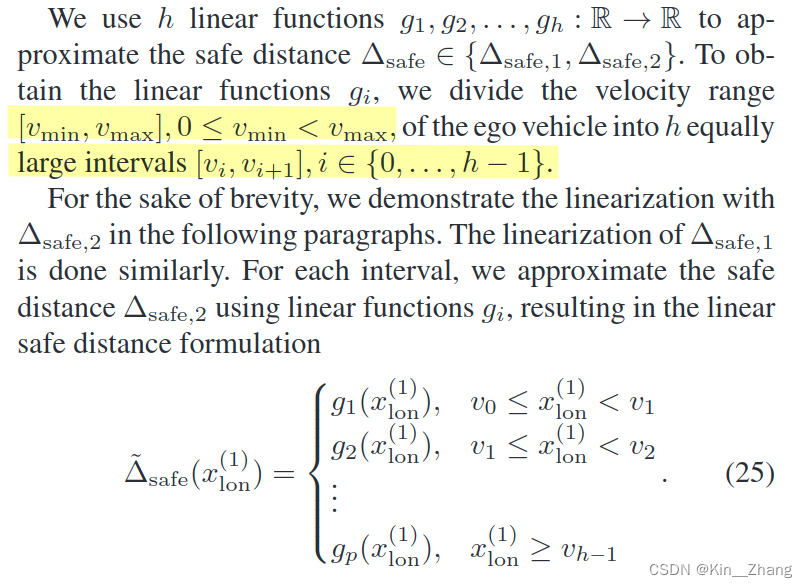
为了将此加入到优化过程,可以表示为maximum function[88]
Δ ~ s a f e ( x l o n ( 1 ) ) = max ( g 1 ( x l o n ( 1 ) ) , g 2 ( x l o n ( 1 ) ) , … , g h ( x l o n ( 1 ) ) ) . \begin{equation*} \tilde{\Delta }_{\mathrm{safe}}(x_{\mathrm{lon}}^{(1)}) = \max \left(g_1(x_{\mathrm{lon}}^{(1)}), g_2(x_{\mathrm{lon}}^{(1)}), \dots, g_h(x_{\mathrm{lon}}^{(1)})\right). \end{equation*} Δ~safe(xlon(1))=max(g1(xlon(1)),g2(xlon(1)),…,gh(xlon(1))).
然后加入纵向距离的约束中 公式(9)
x l o n ( 0 ) ( t ) + Δ ~ s a f e ( x l o n ( 1 ) ) ≤ s m a x ( t ) . \begin{align*} x_{\mathrm{lon}}^{(0)}(t) + \tilde{\Delta }_{\mathrm{safe}}(x_{\mathrm{lon}}^{(1)}) \leq s_{\mathrm{max}}(t). \tag{26} \end{align*} xlon(0)(t)+Δ~safe(xlon(1))≤smax(t).(26)
因为求解器无法求解带max的函数,所以加入h个小于等于的约束, h不应该太大 也不能太小,前者会增加计算负担,后者会有较大误差
x l o n ( 0 ) ( t ) + ( g i ( x l o n ( 1 ) ) + δ b r a k e x l o n ( 1 ) ) ≤ s m a x ( t ) . \begin{align*} x_{\mathrm{lon}}^{(0)}(t) + \left(g_{i}(x_{\mathrm{lon}}^{(1)})+\delta _{\mathrm{brake}}x_{\mathrm{lon}}^{(1)}\right) \leq s_{\mathrm{max}}(t). \tag{27} \end{align*} xlon(0)(t)+(gi(xlon(1))+δbrakexlon(1))≤smax(t).(27)
3. 实验及结果
使用了Python和C++,优化求解库使用的是:CVXPY, ECOS and CVXPY-CODEGEN
Invariably safe set of the scenario
然后主要是实验了几个特定的场景 去验证 fail-safe 的轨迹运行情况:
静态障碍物、前方车辆急刹、行人冲出
4. Conclusion
提出了fail-safe motion planning 来保证AV不会发生事故
对比于其他的verification,我们的方法是第一个能在arbitrary traffic situations使用的;同时保证了40ms内的计算时间,可以与任何其他的motion plan相结合
我们的方案并不会使AV在过度的保守策略中
如果相关法规被扩展,我们的verification也可以自动适应。通过提供的occupancy sets来捕获其他交通参与者的所有合法行为
碎碎念
一开始,ab说这篇算是保守策略的,也就是考虑最差情况;但是初读的时候发现他们在摘要就说了 不会采取过度保守策略,后面一开始没get到这个点,直到问jg的时候发现slack variable和weights的一些trick设计,也就是并不是 非0即1 而是可以超过约束
对于fail-safe的概念也是先由TTR生成状态,然后根据流程图去判断纵向刹停是否可以,不可以的话换横向避障;整体算是一个求解优化问题,只是约束条件等由一系列的状态去决定
赠人点赞 手有余香 😆;正向回馈 才能更好开放记录 hhh
















 1587
1587











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











