







在“二维卷积层”一节里介绍的图像物体边缘检测应用中,我们构造卷积核从而精确地找到了像素变化的位置。为了解决卷积层对图像的过度敏感,比如连拍情况下像素的偏移问题,我们提出了池化(pooling)层。
利用CNN的局部不变性:
所谓局部不变性,比如图像,就是图像经过简单的平移、旋转、尺度放缩,池化层在相同的位置依旧可以提取到相同的特征。这是池化层完成的任务。
池化层直接计算池化窗口内元素的最大值或者平均值,该运算也分别叫做最大池化或平均池化。
最大池化,可以提取最明显的特征。平均池化呢,就是顾及每一个像素,所以选择将所有的像素值都相加然后再平均。
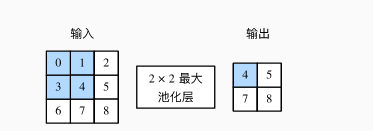
如下图所示,是最大池化的一个过程:
为什么说池化层可以解决像素偏移问题呢?
比如使用2×2最大池化层时,只要卷积层识别的模式在高和宽上移动不超过一个元素,我们依然可以将它检测出来。
from mxnet import nd
from mxnet.gluon import nn
def pool2d(X, pool_size, mode='max'):
p_h, p_w = pool_size # 得到池化层的高和宽
Y = nd.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w + 1)) # 对输出数组形状初始化
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
if mode == 'max':
Y[i, j] = X[i: i + p_h, j: j + p_w].max()
elif mode == 'avg':
Y[i, j] = X[i: i + p_h, j: j + p_w].mean()
return Y
同卷积层一样,池化层也可以在输入的高和宽两侧的填充并调整窗口的移动步幅来改变输出形状。在处理多通道输入数据时,池化层对每个输入通道分别池化,而不是像卷积层那样将各通道的输入按通道相加。这意味着池化层的输出通道数与输入通道数相等。
介绍一下MaxPool2D函数:
class mxnet.gluon.nn.MaxPool2D(pool_size=(2, 2), strides=None, padding=0, layout='NCHW', ceil_mode=False, **kwargs)
pool_size :池化窗口大小,比如输入3代表(3,3)
strides :步幅,可输入2(即(2,2)),或者(2,3)之类的
padding :填充,同样可输入长宽相同或不同的两种形式
layout:数据和输出的维度排序(“nchw”或“nhwc”)。n '、' c '、' h '、' w '分别代表批次、通道、高度和宽度尺寸。填充应用于“h”和“w”维度。
ceil_mode:若为真,则采用ceil而不是floor来计算输出类型(ceil是去大于的最小值,floor是取小于的最大值)















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









