







一、TOF、双目和结构光对比
| 相机类型 | TOF | RGB双目 | 结构光 |
| 测距方式 | 主动式 | 被动式 | 主动式 |
| 工作原理 | 根据光的飞行时间测量 | RGB图像特征点匹配,三角计算间接测量 | 主动投射已知编码图案,提升特征匹配效果 |
| 测量精度 | 最高可达厘米级精度 | 及距离可达毫米级精度 | 近距离内能够达到高精度0.01mm-1mm |
| 测量范围 | 一般为100米以内 | 一般为2m内 | 一般为10m以内 |
| 影响因素 | 受多重反射影响 | 受光照变化和物体纹理影响 | 受反光影响 |
| 软件复杂度 | 较低 | 中等 | 很高 |
二、双目结构光硬件系统

三、软件流程系统

四、技术难点
最难点:双目图像匹配环节的精度提升和时间缩短;
次难点:采集图像、解码、转化成点云环节的时间缩短
五、达到效果
通过双目结构光3D相机可以三维重建被测物体,实现测量和检测缺陷的功能
六、方案对比
相机分辨率2560*1920,测量精度1um,测量距离500mm-1000mm,测量范围400*280*200
| 方案 | 规格 | 型号 | 价格 |
| 购买方案 | 500万像素2+DLP | 61880 | |
| 研发方案 | 500万像素2+DLP | DLP4500 | 15000 |
购买3D相机网址:工业级高精度三维立体扫描仪自动双目结构光激光扫描仪3D相机检测 (1688.com)
七、TOF3D相机调研

| 优势 | 劣势 |
| 测量时间短 | 散射光影响 |
| 测量距离远 | 多重反射影响 |
| 成本低 | 精度低,分辨率低 |
1、散射光
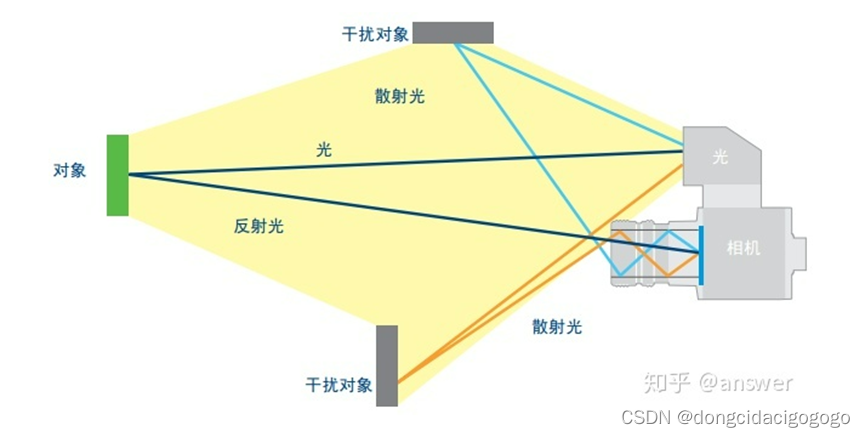
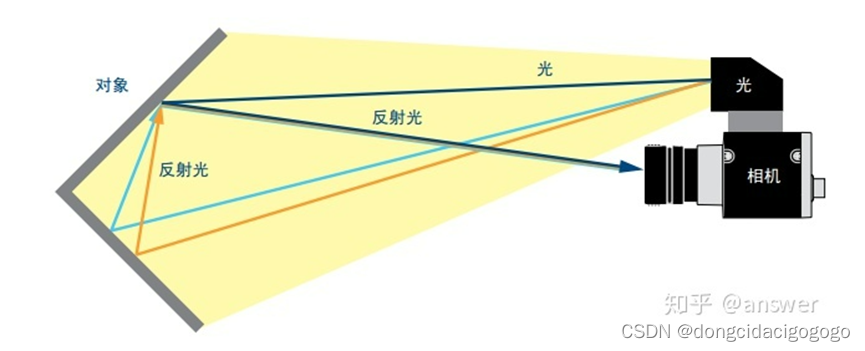
2、多重反射
3、精度低、分辨率低
成像传感器:TOF的相机的核心。该传感器结构与普通图像传感器类似,但比图像传感器更复杂,它包含2个或者更多快门,用来在不同时间采样反射光线。因此,TOF芯片像素比一般图像传感器像素尺寸要大得多,一般100um左右。
应用领域:
1、汽车:TOF传感器可以用于自动驾驶,通过TOF技术对行车环境进行感知,从而获取环境信息以增加安全性,此外TOF还可以用于汽车内的乘客离位检测。
2、工业领域:TOF传感器可以被用作HMI(人机接口:Human Machine Interface),在高度自动化的工厂中,工人和机器人需要在很近的距离下协同工作,TOF设备可以用于控制各种情形下的安全距离。
3、人脸识别系统:TOF相机的亮度图像和深度信息可以通过模型连接起来,迅速精准的完成人脸匹配和检测。
4、物流行业:通过 TOF 相机迅速获得包裹的抛重(即体积),来优化装箱和进行运费评估;
5、安防和监控:利用景深进行人数统计( Peoplecounting)俗称“数人头”,确定进入某区域的人数;通过对人流或复杂交通系统的人数统计,实现对安防系统的统计分析设计;以及敏感地区的检测对象监视;
6、机器视觉:工业定位、工业引导和体积预估;替代工位上占用大量空间的、基于红外光进行安全生产控制的设备;
| 分辨率 | 帧率 | 测量范围 | 精度 |
| 320*240 | 20fps | 0.5-6m | 1mm |
| 320*240 | 20fps | 0.5-3m | 1mm |
| 640*480 | 30fps | 0.2-5m |
网址:TOF3D相机-杭州蓝芯科技有限公司 (foodjx.com)
八、PhonoNeo结构光3D相机

分辨率:2064*1544
采集时间:669ms计算时间:379ms传输时间:2234ms
九、单目结构光和双目结构光区别
1、双目只需要两个相机单独标定然后两个相机联合标定,不需要与结构光做相0o息(三维信息)。
2、单目需要与结构光做相位展开标定,得到相位解包裹数据后,使用标定参数换算三维数据,这种方案不用做双目的相位匹配,所以速度快。
3、相同分辨率下双目结构光精度高于单目结构光,可以提高单目结构光相机分辨率提高精度,另外双目结构光的优势有重建遮挡区域。















 506
506











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









