






VMware Ubuntu ros noetic使用Astra S相机查看图像及点云数据
Ubuntu20.04 noetic Astra S (摄像头包地址:
https://gitee.com/zhangwanjie/ros_astra_camera.git)
参考博主:
ROS melodic+Astra s编译运行ros_astra_camera实录(踩坑没填完)
https://blog.csdn.net/qq_50220094/article/details/126186616
ROS下使用乐视RGB-D深度相机/Orbbec Astra Pro显示图像和点云
https://blog.csdn.net/Arcann/article/details/109495134?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522168156959416800217215143%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=168156959416800217215143&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-3-109495134-null-null.142^v83^insert_down38,239^v2^insert_chatgpt&utm_term=ros%20noetic%E8%8E%B7%E5%8F%96Astra%20S%E7%82%B9%E4%BA%91%E6%95%B0%E6%8D%AE&spm=1018.2226.3001.4187
一:创建工作空间
mkdir -p astracam_ws/src
cd astracam_ws/src
catkin_init_workspace
cd astracam_ws
catkin_make
source devel/setup.sh
二:安装依赖
sudo apt install ros-$ROS_DISTRO-rgbd-launch ros-$ROS_DISTRO-libuvc ros-$ROS_DISTRO-libuvc-camera ros-$ROS_DISTRO-libuvc-ros
这儿如果有问题一般是没有安装rgbd-launch、libuvc 、libuvc-camera、libuvc-ros功能包的原因,一般用安装命令基本都能安装,但是相对于libuvc的功能包,能安装上,但是编译的时候会找不到路径,如果出现
make[2]: *** [ros_astra_camera/CMakeFiles/camera_node.dir/build.make:150:/home/linder/astracam_ws/devel/lib/astra_camera/camera_node] 错误 1
Invoking “catkin_make -j4 -l4” failed
之类的错误,是因为CMakeLists文件中没找到libuvc包,进入ros_astra_camera功能包里面的CMakeLists.TXT文件进行添加,将
cmake_minimum_required(VERSION 2.8.3)
project(astra_camera)
find_package(catkin REQUIRED camera_info_manager dynamic_reconfigure image_transport nodelet sensor_msgs roscpp message_generation)
find_package(Boost REQUIRED COMPONENTS system thread)
find_package(libuvc REQUIRED)
#MACHINE = $(shell uname -m)
execute_process(COMMAND uname -m OUTPUT_VARIABLE MACHINES )
execute_process(COMMAND getconf LONG_BIT OUTPUT_VARIABLE MACHINES_BIT )
添加(首先确定你libuvc包的路径)
cmake_minimum_required(VERSION 2.8.3)
project(astra_camera)
find_package(catkin REQUIRED camera_info_manager dynamic_reconfigure image_transport nodelet sensor_msgs roscpp message_generation)
find_package(Boost REQUIRED COMPONENTS system thread)
find_package(libuvc REQUIRED)
#//edit by Linder
set(libuvc_INCLUDE_DIRS "/usr/local/include/libuvc")
set(libuvc_LIBRARIES "/usr/local/lib/libuvc.so")
#MACHINE = $(shell uname -m)
execute_process(COMMAND uname -m OUTPUT_VARIABLE MACHINES )
execute_process(COMMAND getconf LONG_BIT OUTPUT_VARIABLE MACHINES_BIT )
三:编译
依赖安装好了以后就可以进行编译,一般没问题了
四:创建 astra udev 规则
roscd astra_camera
./scripts/create_udev_rules
五:再次编译
catkin_make
六:启动launch
roscd astra_camera/launch
#因为我的相机型号是Astra s,所以就运行这一句
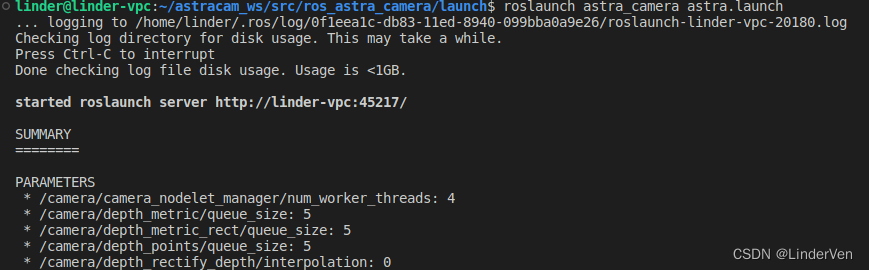
roslaunch astra_camera astra.launch
#型号是Astra Stereo S (w/ UVC)就用下面这句
roslaunch astra_camera stereo_s.launch
由于第一次没装rgbd-launch 包;运行出错
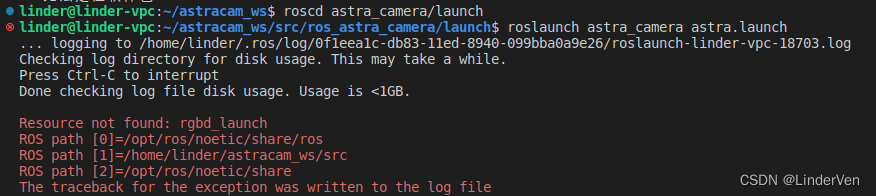 进行
进行sudo apt-get install ros-melodic-rgbd-launch后运行结果如下
 注意连接好摄像头
注意连接好摄像头
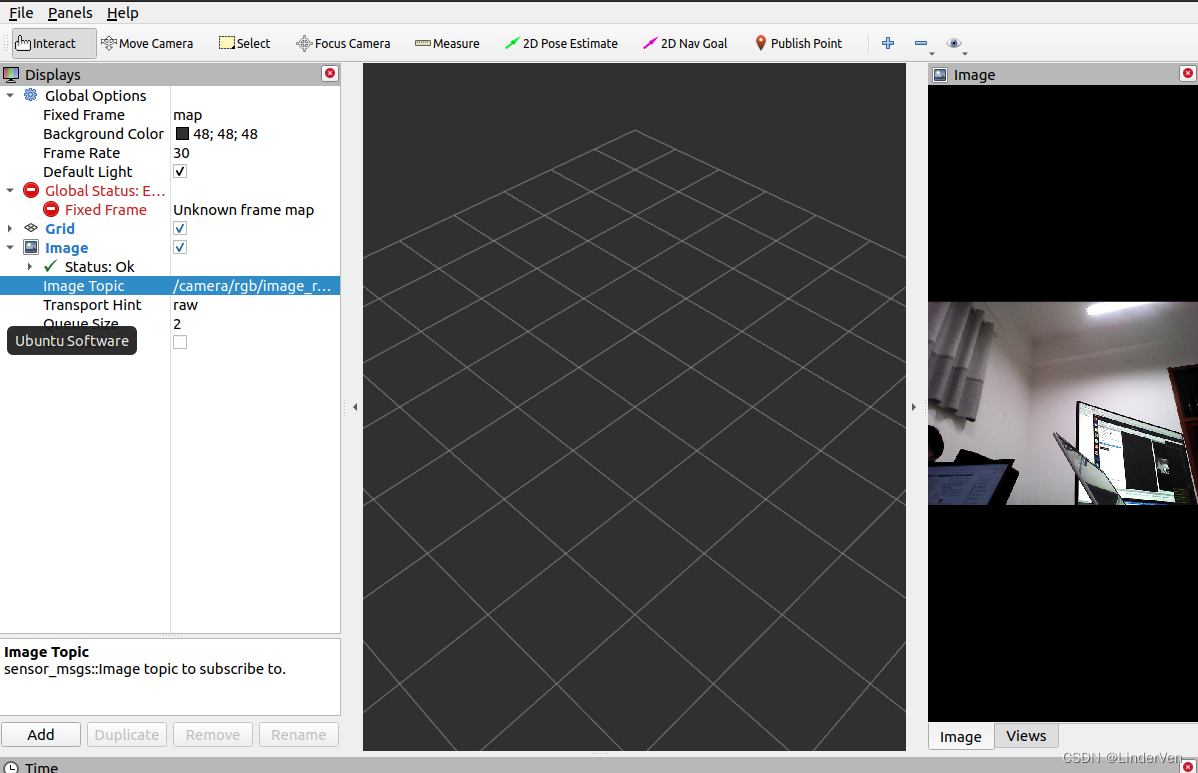
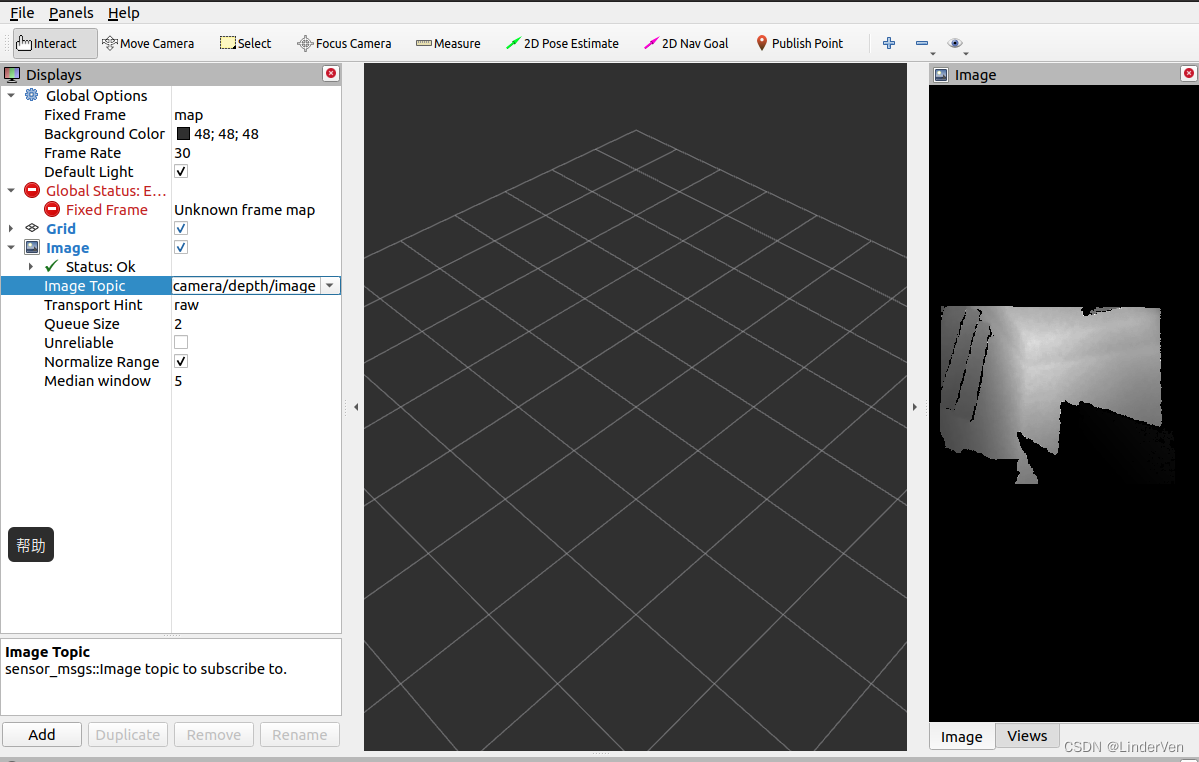
七:查看
启动rviz
rviz
八:添加点云
以下步骤是上面参考博主的
1 新建rviz文件
cd ~/astracam_ws/src
mkdir rviz
cd rviz
touch depth_camera.rviz
2 编辑rviz文件
cd ~/astracam_ws/src/rviz
sudo gedit depth_camera.rviz
填写代码如下
Panels:
- Class: rviz/Displays
Help Height: 88
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /Grid1
- /PointCloud21
Splitter Ratio: 0.5
Tree Height: 453
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.588679016
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: PointCloud2
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 159; 147; 147
Enabled: true
Line Style:
Line Width: 0.0299999993
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XZ
Plane Cell Count: 10
Reference Frame: camera_depth_optical_frame
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 8.875
Min Value: 1.28500009
Value: true
Axis: X
Channel Name: intensity
Class: rviz/PointCloud2
Color: 255; 255; 255
Color Transformer: AxisColor
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4096
Min Color: 0; 0; 0
Min Intensity: 0
Name: PointCloud2
Position Transformer: XYZ
Queue Size: 10
Selectable: true
Size (Pixels): 3
Size (m): 0.00999999978
Style: Squares
Topic: /camera/depth/points
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Default Light: true
Fixed Frame: camera_depth_frame
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 7.51409006
Enable Stereo Rendering:
Stereo Eye Separation: 0.0599999987
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: 2.80641723
Y: -0.0263374168
Z: -0.295807391
Focal Shape Fixed Size: true
Focal Shape Size: 0.0500000007
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.00999999978
Pitch: 0.305203468
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 3.89040422
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 744
Hide Left Dock: false
Hide Right Dock: true
QMainWindow State: 000000ff00000000fd00000004000000000000016a0000025efc0200000009fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006100fffffffb0000001e0054006f006f006c002000500072006f0070006500720074006900650073020000019b000001b500000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c00610079007301000000280000025e000000d700fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb0000000a0049006d00610067006500000001a9000001430000000000000000000000010000010f000002c4fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a005600690065007700730000000028000002c4000000ad00fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000005150000003efc0100000002fb0000000800540069006d00650100000000000005150000030000fffffffb0000000800540069006d00650100000000000004500000000000000000000003a50000025e00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: true
Width: 1301
X: 65
Y: 24
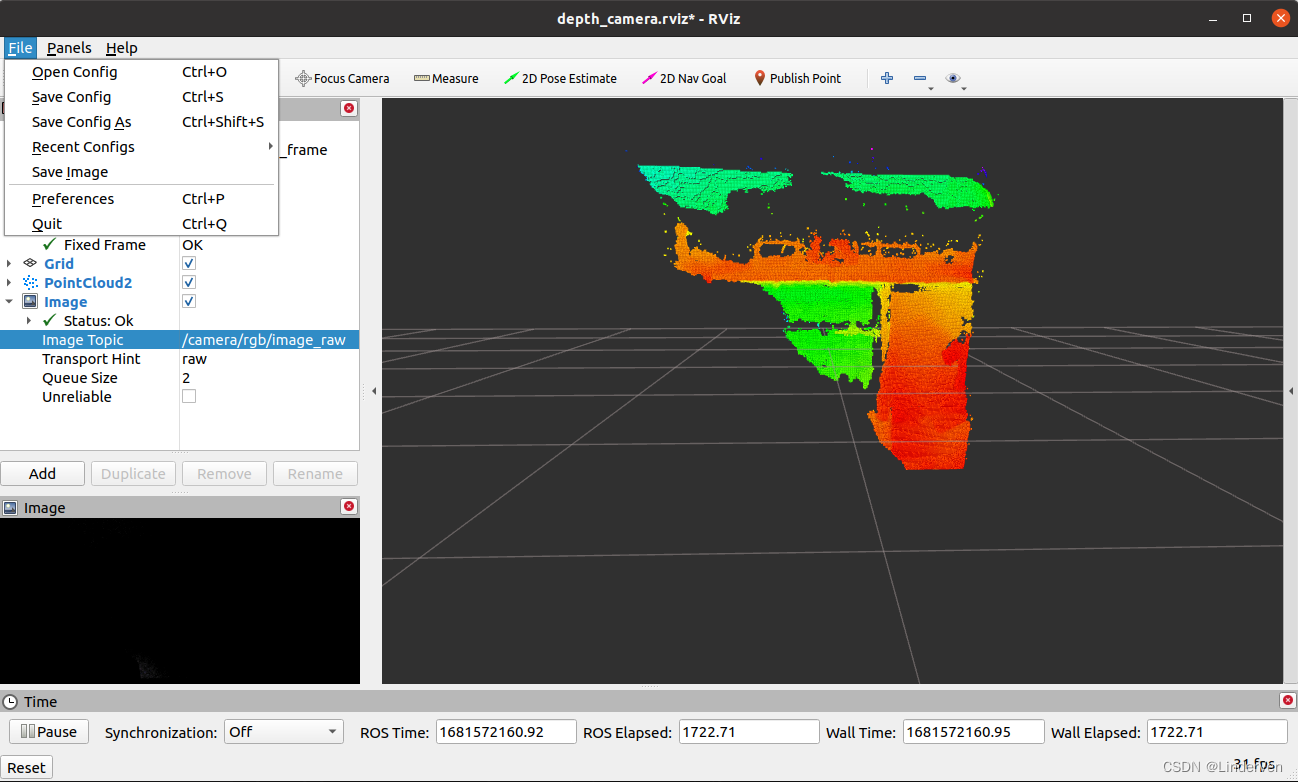
3 在rviz中显示点云
打开rviz
rviz
点击 file ——> open config














 3186
3186











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









