







提示:本篇为学习笔记,原文链接已附上
原文学习链接:ReadAir——simscape仿真(三)
前言
最近在向大佬学习simscape仿真,链接在上面,记录一下,做些积累,有错误的地方欢迎大家指正!
matlab r2021a版本
1.建立合适的坐标系
(注意:相连的两个物体必须在同一个坐标系下)

2.点开MATLAB->点击simulink->找到simscape->creat multibody

3.保存工程(养成良好的保存习惯)
4. 开始创建(用到的模块都在Simscape库里,实在找不到的可以在上方搜索,例如搜索rigid transform,找到后右击选择select in library view就能找到该模块所在库的位置)



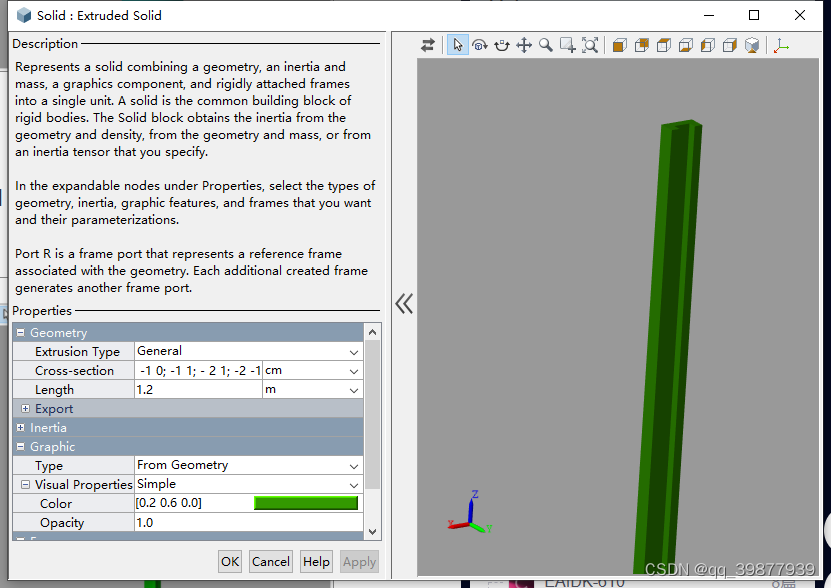
(1)滑块导轨
- Extrusion Type: General
- Cross-section : [2 -1;2 1;1 1;1 0;-1 0;-1 1;- 2 1;-2 -1] cm
- Length : 1.2 m
属性编辑好之后,建立坐标系一个世界坐标系,固定导轨底座


再建立一个连接滑块的坐标系——导轨,方法同上,取消勾选R坐标


(2) 滑块与导轨在Y轴相对滑动,所以需要添加一个关节,限制X和Z轴的活动,如下图,Z轴相同设置

(3)滑块
- Shape : Brick
- Dimensions : [2 12 20] cm

建立与导轨坐标相同的坐标系,将滑块与导轨连接在一起

建立中心位置的坐标系,用于连接摆动轴
同样取消勾选R坐标

(4)摆杆轴
- Radius : 0.02 m
- Length : 0.2 m



(5)转动关节
一开始的时候搞点倾斜角,让系统不稳定才能动起来

(6)摆杆


5.运行
















 452
452











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









