







Simscape/Multibody/Frames and Transforms
笔者水平有限,欢迎更正补充
1.Reference Frame:
即参考基坐标系,说白了他的作用就是在仿真结果处能让你清楚的看到变换过后的坐标系此时的方向位置。在用simscape建模时,建一或者两个连杆的模型你不用reference frame还能爽一爽(事实上两个连杆你也爽不了,后面我们讲二连赶建模时会说到),但是当你的模型连杆数量变多,当系统逐渐变复杂,需要关注的坐标系的数量会多到你头疼。在关键的地方都放上一个参考坐标系能让你对整个系统的坐标系有个比较准确的把握。
应用场景与使用方法:
参考坐标系不是必须的,使用它是为了给咱的建模仿真带来方便。可以在零件建模时,在任何需要知道某个坐标系的位置和方向的情况下使用。
举个栗子:要一个连杆两端两个旋转关节的相对位置,可以使用参考坐标系来确定两个旋转关节位置时。
我们选择连杆几何中心连一个参考坐标系。然后相对该参考坐标系,分别向前后两个方向平移一半连杆长度得到两个旋转关节的两个座标系,将它们Base端同时连接R口。
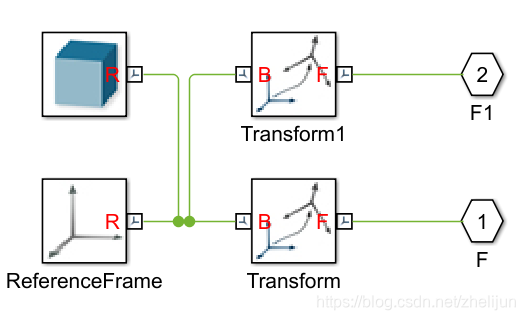
此时你进行仿真,可以知道这个这个零件几何中心处坐标系的方位,但是分别经过transform1和transform2变换过后的坐标系飘哪里了咱并不清楚。因此可以再在两个变换后分别加上reference frame,这样再进行仿真。仿真结果界面坐标会多出两个参考坐标系。点击即可看到具体方位。
2.Rigid Transform

即刚性坐标转换,通常与参考基座标系一起使用,用来定义坐标之间的相对位置。
应用场景与使用方法:
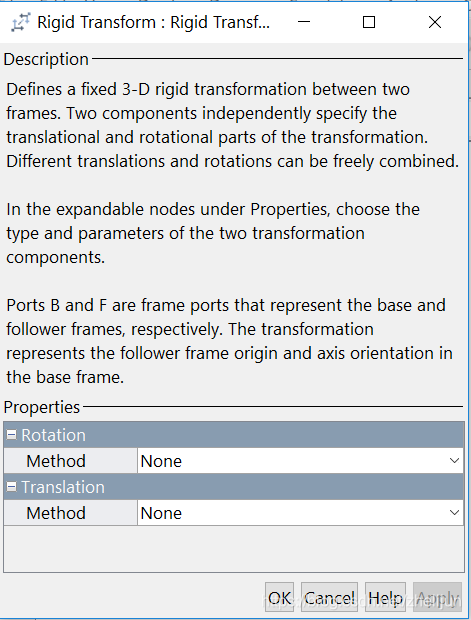
在已有一个坐标系的情况下,确定下一个坐标系(Follower口)相对于前一个坐标系(Base口)的位置时使用(见上面那个栗子)。也正因此,固定坐标系可以调节跟随坐标系与基座标系之间的关系(比如是平移还是旋转,相对于哪个轴旋转,沿着哪个轴平移,旋转和平移的量各是多少)。
注意,如果你同时定义了旋转与平移。那么这个block执行动作的顺序是先平移再旋转
3.Transform Sensor:
测量两个坐标系之间(F相对于B)的关系
应用场景:

想要测量两个刚体之间的位置关系,速度关系,加速度关系都可以用这个来测量。Base口连接基座标系,Follower口连接想要测量的坐标系。
4.World Frame 世界坐标系:

整个模型的基座标系,一个模型可以有多个世界坐标系,但都只能代表一个世界坐标系。
应用场景和使用方法:
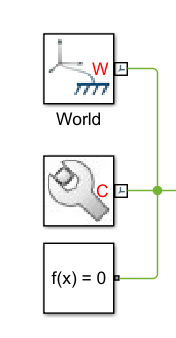
每次建模先拖一个世界坐标系进来作为你模型的全局基坐标系,然后在你的整个模型中选一个固定基座连接W口,通常与Mechanism Configuration以及Solver configuration一并使用。

















 8171
8171

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









