









ardupilot增加自定义测距传感器-NRA15
环境描述
1.ardupilot软件版本:copter-4.2.2
2.编辑软件:VS code
3.编译软件:Cygwin64
4.地面站:Missionplanner
代码添加步骤
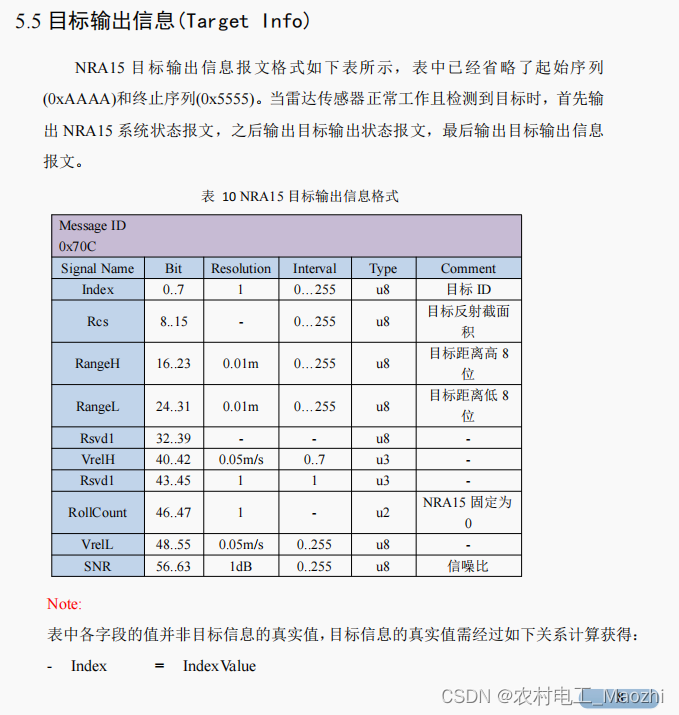
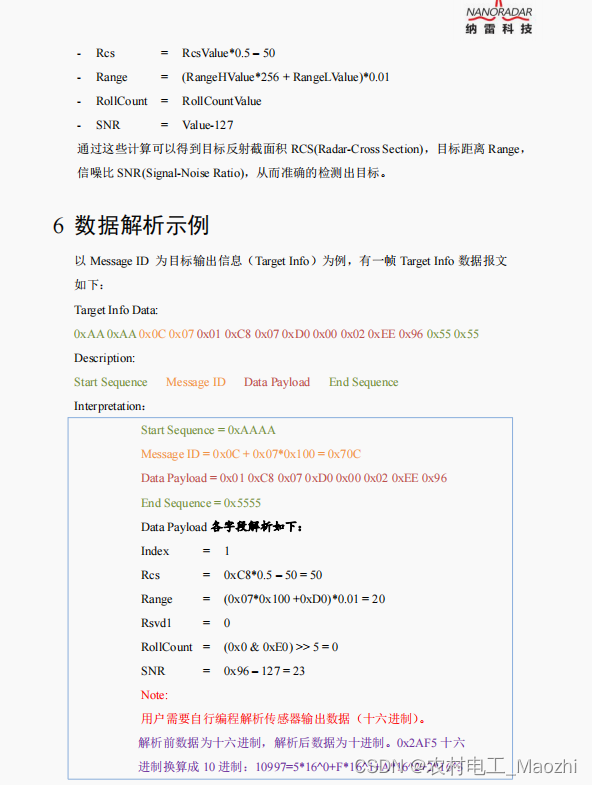
NRA15协议截图如下:
① 在目录"…\ardupilot\libraries\AP_RangeFinder"下新建AP_RangeFinder_NRA15Serial.cpp,AP_RangeFinder_NRA15Serial.h两个文件
AP_RangeFinder_NRA15Serial.cpp程序如下:
#include <AP_HAL/AP_HAL.h>
#include <AP_SerialManager/AP_SerialManager.h>
#include "AP_RangeFinder_NRA15Serial.h"
extern const AP_HAL::HAL& hal;
// read - return last value measured by sensor
inline bool if_data_frame(uint8_t *buf ,float &reading_m){
uint8_t *payload=(buf+4); // 目标数据
uint8_t *msg_id=(buf+2); // 包ID
if((msg_id[0]+(((uint16_t)msg_id[1])<<8))!=0x70c) return false;
reading_m=((payload[2]*0x100+payload[3])*0.01);
return true;
}
// frame: Start_Sequence Message_ID Data_Payload End_Sequence
bool AP_RangeFinder_NRA15_Serial::get_reading(float &reading_m)
{
if (uart == nullptr) {
return false;
}
uint32_t nbytes = uart->available();
while(nbytes-->0){
uint8_t c = uart->read();
switch (_reading_state)
{
case Status::WAITTING:{
if (c == 0xAA)
{
buffer_count=0;
linebuf[buffer_count]=c;
_reading_state=Status::GET_HEAD_ONCE;
}
break;
}
case Status::GET_HEAD_ONCE:{
if(c == 0xAA){
buffer_count++;
linebuf[buffer_count]=c;
_reading_state=Status::WAITTING_FOR_TAIL;
}
else
{
buffer_count++;
linebuf[buffer_count]=0xAA;
buffer_count++;
linebuf[buffer_count]=c;
_reading_state=Status::WAITTING_FOR_TAIL;
}
break;
}
case Status::WAITTING_FOR_TAIL:{
buffer_count++;
linebuf[buffer_count]=c;
if(c==0x55)
_reading_state=Status::GET_TAIL_ONCE;
break;
}
case Status::GET_TAIL_ONCE:{
if(c ==0x55){
buffer_count++;
linebuf[buffer_count]=c;
_reading_state=Status::GET_ONE_FRAME;
}
break;
}
case Status::GET_ONE_FRAME:{
_reading_state=Status::WAITTING;
if(if_data_frame(linebuf,reading_m)) return true;
break;
}
default:
break;
}
if(buffer_count>sizeof(linebuf)){
buffer_count=0;
_reading_state=Status::WAITTING;
}
}
return true;
}
AP_RangeFinder_NRA15Serial.h程序如下:
#pragma once
#include "AP_RangeFinder.h"
#include "AP_RangeFinder_Backend_Serial.h"
class AP_RangeFinder_NRA15_Serial : public AP_RangeFinder_Backend_Serial
{
public:
using AP_RangeFinder_Backend_Serial::AP_RangeFinder_Backend_Serial;
protected:
enum class Status {
WAITTING=0,
GET_HEAD_ONCE,
GET_HEAD,
GET_TAIL_ONCE,
GET_TAIL,
GET_ONE_FRAME,
WAITTING_FOR_TAIL,
}_reading_state;
virtual MAV_DISTANCE_SENSOR _get_mav_distance_sensor_type() const override {
return MAV_DISTANCE_SENSOR_LASER;
}
private:
// get a reading
bool get_reading(float &reading_m) override;
uint8_t linebuf[50];
uint8_t buffer_count=0;
};
② 在AP_RangeFinder.cpp包含
#include "AP_RangeFinder_NRA15Serial.h"
③ 在void RangeFinder::detect_instance(uint8_t instance, uint8_t& serial_instance)函数switch语句中添加:
case Type::NRA15:
if (AP_RangeFinder_NRA15_Serial::detect(serial_instance)) {
_add_backend(new AP_RangeFinder_NRA15_Serial(state[instance], params[instance]), instance, serial_instance++);
}
④ 在class RangeFinder的enum class Type中新增测距传感器NRA15:
NRA15 = 67,
⑤ 编译然后下载到飞控
测试步骤
① Missionplanner参数设置
Ⅰ 设置串口及波特率,这里我用的NRA15接口为串口,我接在飞控的telem2上
SERIAL2_PROTOCOL = 9
SERIAL2_BAUD = 115
Ⅱ 设置测距传感器类型,测距范围及安装方向
RNGFND1_TYPE = 67
RNGFND1_MAX_CM = 3000
RNGFND1_MIN_CM = 10
RNGFND1_ORIENT = 25 // 向下安装
Ⅲ 写入参数,然后重启飞控
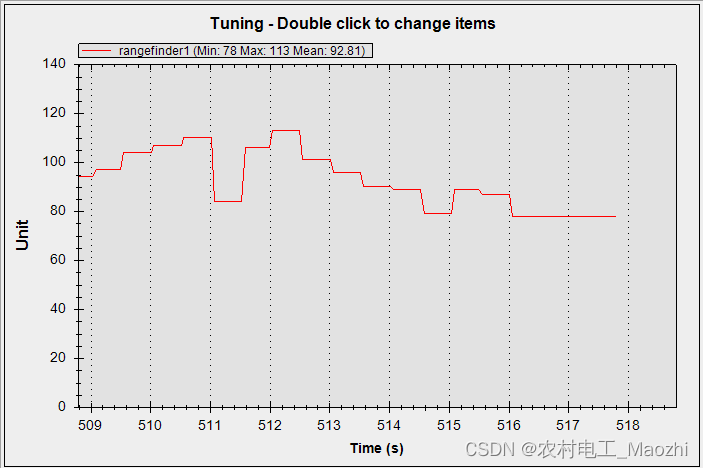
② 调试查看
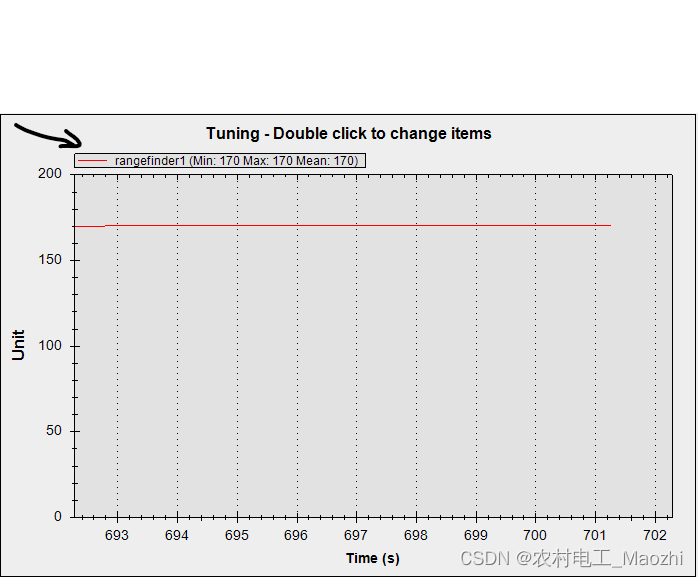
在Missionplanner最下面有一个调试,勾选上然后会出来一个曲线显示表

双击箭头所指的位置,然后再列表里找到刚刚配置的rangefinder1,勾选就会显示对应的传感器测量曲线。















 6433
6433











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









