








 超级会员免费看
超级会员免费看


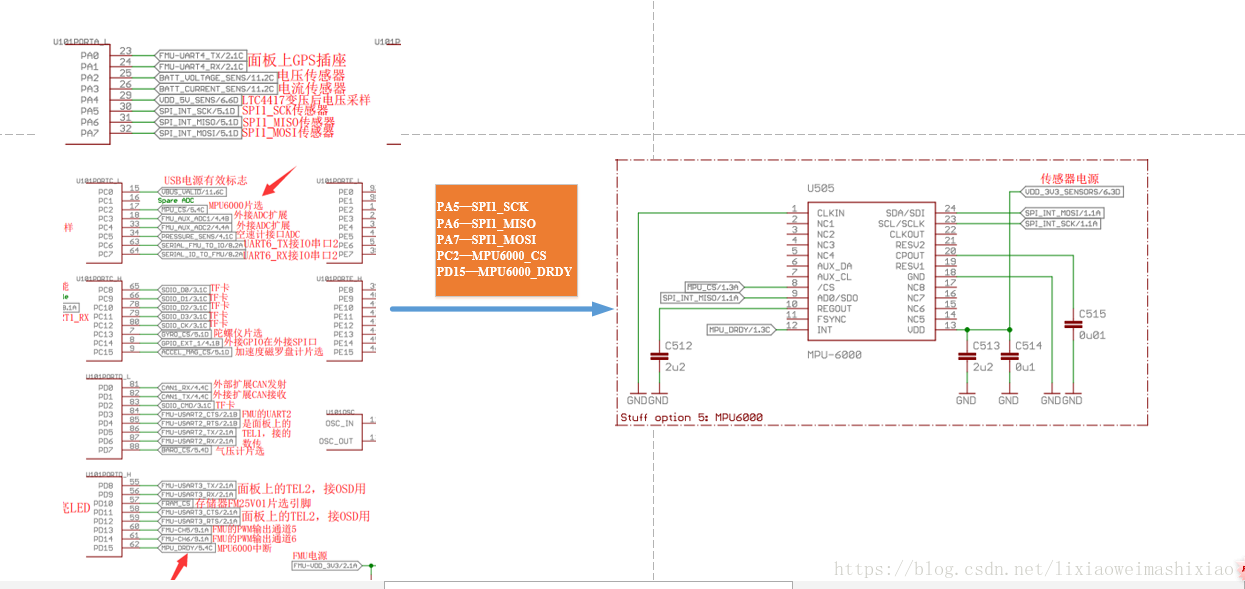
 本文档详述ardupilot飞控如何处理mpu6000传感器数据,包括初始化、数据更新及转换至北东地坐标系的过程,涉及坐标旋转和滤波处理。
本文档详述ardupilot飞控如何处理mpu6000传感器数据,包括初始化、数据更新及转换至北东地坐标系的过程,涉及坐标旋转和滤波处理。
目录
摘要:本文档主要记录是实现基于ardupilot飞控代码,学习传感器数据获取的文档,欢迎批评指正
1.原理图学习
2.程序流程
**跟着思路往下走,主要围绕这几点学习?
(1)mpu6000传感器怎么实现初始化?
(2)mpu6000传感器数据怎么更新?
(3)mpu6000传感器数据怎么被调用?
(1)mpu6000传感器怎么实现初始化?
**跟着思路往下走,主要围绕这几点学习?
(1)mpu6000传感器怎么实现初始化?
(2)mpu6000传感器数据怎么更新?
(3)mpu6000传感器数据怎么被调用?
(1)mpu6000传感器怎么实现初始化?
 6781
654
6781
654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























