









ROS Melodic 官网安装指南总入口
本教程为apt-get命令安装方式,包括详细的安装步骤、错误的解决方式和正确安装的现象
文章目录
1 安装
1.1 设置程序安装源并更新 Debian 包索引
- 命令:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt update
- 补充:
如果下载速度缓慢,可以从ROS镜像源就近选择一个镜像源替换上面的地址,本次安装使用的是清华的镜像。 - 成功:
在指定位置生成了一个ros-latest.list文档,文档内容如下:
$ cat /etc/apt/sources.list.d/ros-latest.list
deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ bionic main
1.2 设置密钥
- 命令:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
- 成功:
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
Executing: /tmp/apt-key-gpghome.4jZIfkh2iI/gpg.1.sh --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
gpg: key F42ED6FBAB17C654: public key "Open Robotics <info@osrfoundation.org>" imported
gpg: Total number processed: 1
gpg: imported: 1
1.3 安装
- 命令:
sudo apt install ros-melodic-desktop-full
- 补充:
本次安装直接安装了大礼包,ROS提供了四种默认搭配,如下:
#桌面完整版(推荐): 包含 ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及 2D/3D 感知包。
sudo apt install ros-melodic-desktop-full
#桌面版: 包含 ROS,rqt,rviz 和机器人通用库。
sudo apt install ros-melodic-desktop
#ROS-基础包: 包含 ROS 包,构建和通信库。没有图形界面工具。
sudo apt install ros-melodic-ros-base
#单独的包: 你也可以安装某个指定的ROS软件包(使用软件包名称替换掉下面的PACKAGE)。
sudo apt install ros-melodic-包名
e.g:sudo apt install ros-melodic-slam-gmapping
#要查找可用软件包,请运行:
apt search ros-melodic
大概十分钟左右可以安装完,速度太慢的话就考虑换个镜像。
2 初始化rosdep
在你使用 ROS 之前,需要初始化 rosdep。rosdep 让你能够轻松地安装被想要编译的源代码,或被某些 ROS 核心组件需要的系统依赖。
2.1 安装rosdep
- 命令:
sudo apt-get install python-rosdep
- 成功:
2.2 初始化
- 命令:
sudo rosdep init
- 补充:花式翻车,直接看加粗的解决方法二吧
错误1:ERROR: cannot download default sources list from
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
解决方法:添加host
sudo sh -c 'echo "151.101.84.133 raw.githubusercontent.com" >> /etc/hosts'
错误2:Rosdep experienced an error: (‘The read operation timed out’,)
ERROR: Rosdep experienced an error: ('The read operation timed out',)
Please go to the rosdep page [1] and file a bug report with the stack trace below.
[1] : http://www.ros.org/wiki/rosdep
rosdep version: 0.21.0
SSLError: ('The read operation timed out',)
解决方法:
方法一:多试几次
方法二(看这个!!!):
把20-default.list文件内容复制到20-default.list里,步骤和内容如下:
sudo mkdir -p /etc/ros/rosdep/sources.list.d
cd /etc/ros/rosdep/sources.list.d
sudo gedit 20-default.list
20-default.list文件内容:
# os-specific listings first
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
# generic
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
- 成功:

2.3 更新
- 命令:
不要加sudo!如果不小心加了,执行sudo rosdep fix-permissions即可恢复文件的权限
rosdep update
- 补充:
花式翻车,总结原因就是被墙了。
翻车1:ERROR: error loading sources list:
(‘The read operation timed out’,)
翻车2:ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml]
解决方法:
1.把rosdistro下载到本地(推荐Download ZIP),目录层级如下图:
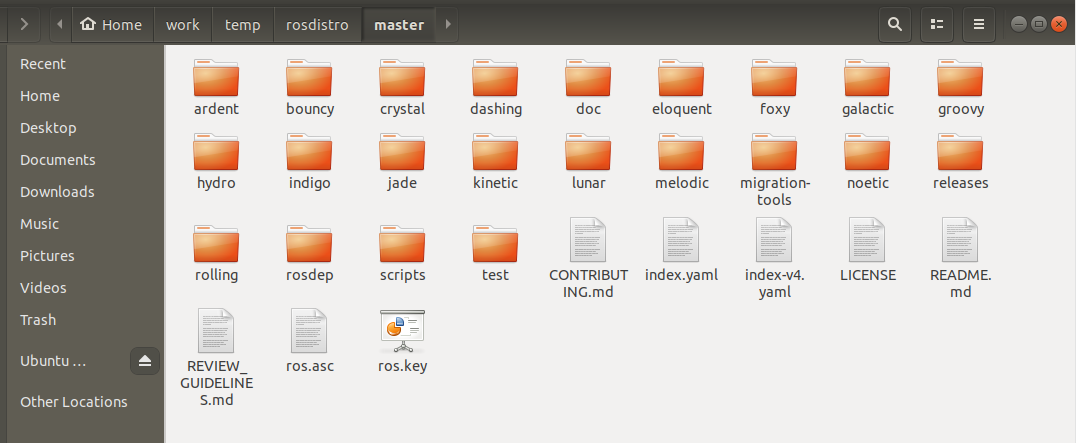
2.修改20-default.list文件内容,把所有的https://raw.githubusercontent.com/ros/rosdistro/master替换成上图文件所在目录(示例为file:///home/libo/work/temp/rosdistro/master),修改后的文件内容如下
# os-specific listings first
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
# generic
yaml file:///home/libo/work/temp/rosdistro/master/rosdep/base.yaml
yaml file:///home/libo/work/temp/rosdistro/master/rosdep/python.yaml
yaml file:///home/libo/work/temp/rosdistro/master/rosdep/ruby.yaml
gbpdistro file:///home/libo/work/temp/rosdistro/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
3 修改rosdep下面三个源文件里所有的raw.githubusercontent.com替换成步骤2中一样的文件目录:
/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
/usr/lib/python2.7/dist-packages/rosdep2/rep3.py
/usr/lib/python2.7/dist-packages/rosdistro/__init__.py
/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py: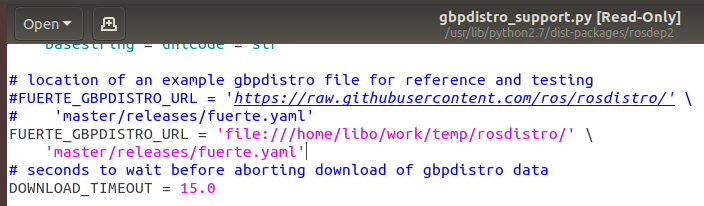
/usr/lib/python2.7/dist-packages/rosdep2/rep3.py: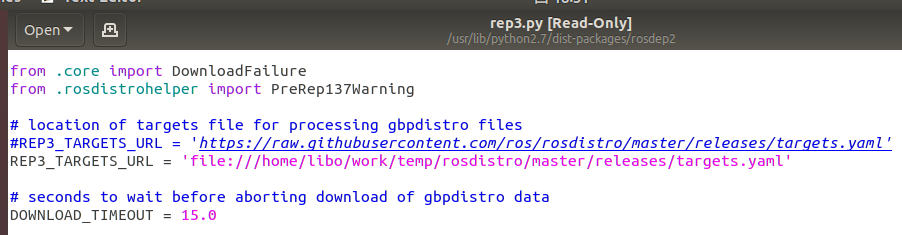
/usr/lib/python2.7/dist-packages/rosdistro/__init__.py:
- 成功:
rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit file:///home/libo/work/temp/rosdistro/master/rosdep/osx-homebrew.yaml
Hit file:///home/libo/work/temp/rosdistro/master/rosdep/base.yaml
Hit file:///home/libo/work/temp/rosdistro/master/rosdep/python.yaml
Hit file:///home/libo/work/temp/rosdistro/master/rosdep/ruby.yaml
Hit file:///home/libo/work/temp/rosdistro/master/releases/fuerte.yaml
Query rosdistro index file:///home/libo/work/temp/rosdistro/master/index-v4.yaml
Skip end-of-life distro "ardent"
Skip end-of-life distro "bouncy"
Skip end-of-life distro "crystal"
Skip end-of-life distro "dashing"
Skip end-of-life distro "eloquent"
Add distro "foxy"
Add distro "galactic"
Skip end-of-life distro "groovy"
Skip end-of-life distro "hydro"
Skip end-of-life distro "indigo"
Skip end-of-life distro "jade"
Skip end-of-life distro "kinetic"
Skip end-of-life distro "lunar"
Add distro "melodic"
Add distro "noetic"
Add distro "rolling"
updated cache in /home/libo/.ros/rosdep/sources.cache
3 设置环境(可选但是推荐)
- 说明:不设置的话,就每次重启手动运行一下
source /opt/ros/melodic/setup.bash - 命令:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
4 构建工厂依赖(可选但是推荐)
- 命令:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
5 安装rosbash(可选但是推荐)
- 命令:
sudo apt install rosbash
source .bashrc
6 检查是否安装成功
- 命令:
printenv | grep ROS
- 补充:
要是不成功,执行一下source /opt/ros/melodic/setup.bash - 成功:
ROS_ETC_DIR=/opt/ros/melodic/etc/ros
ROS_ROOT=/opt/ros/melodic/share/ros
ROS_MASTER_URI=http://localhost:11311
ROS_VERSION=1
ROS_PYTHON_VERSION=2
ROS_PACKAGE_PATH=/opt/ros/melodic/share
ROSLISP_PACKAGE_DIRECTORIES=
ROS_DISTRO=melodic
7 可可爱爱的小乌龟例程
折腾一大圈,这就装好了,是不是超级没有真实感,那运行下小乌龟例程吧,小乌龟这么可爱,没有人逃得掉
官网小乌龟教程,ros官网yyds
7.1 运行roscore
- 命令:
roscore - 成功:
成功界面如下,不是卡住了,这个终端被它占用了
... logging to /home/xxx/.ros/log/a6624b52-16be-11ec-96d1-48b02d2ffd02/roslaunch-ugv-21938.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ugv:37461/
ros_comm version 1.14.11
SUMMARY
========
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.11
NODES
auto-starting new master
process[master]: started with pid [21970]
ROS_MASTER_URI=http://ugv:11311/
setting /run_id to a6624b52-16be-11ec-96d1-48b02d2ffd02
process[rosout-1]: started with pid [21984]
started core service [/rosout]
7.2 使用turtlesim
另开终端,刚刚那个roscore的终端不要关。
- 命令:
rosrun turtlesim turtlesim_node - 补充:报
-bash: rosrun: command not found的话执行一下步骤5,别漏了source - 成功:
7.3 开启键盘控制小乌龟爬
另开终端,刚刚那个roscore和turtlesim_node的终端不要关。
- 命令:
rosrun turtlesim turtle_teleop_key - 补充:选中这个终端,按方向键就可以了
- 画个啥:














 833
833











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









