






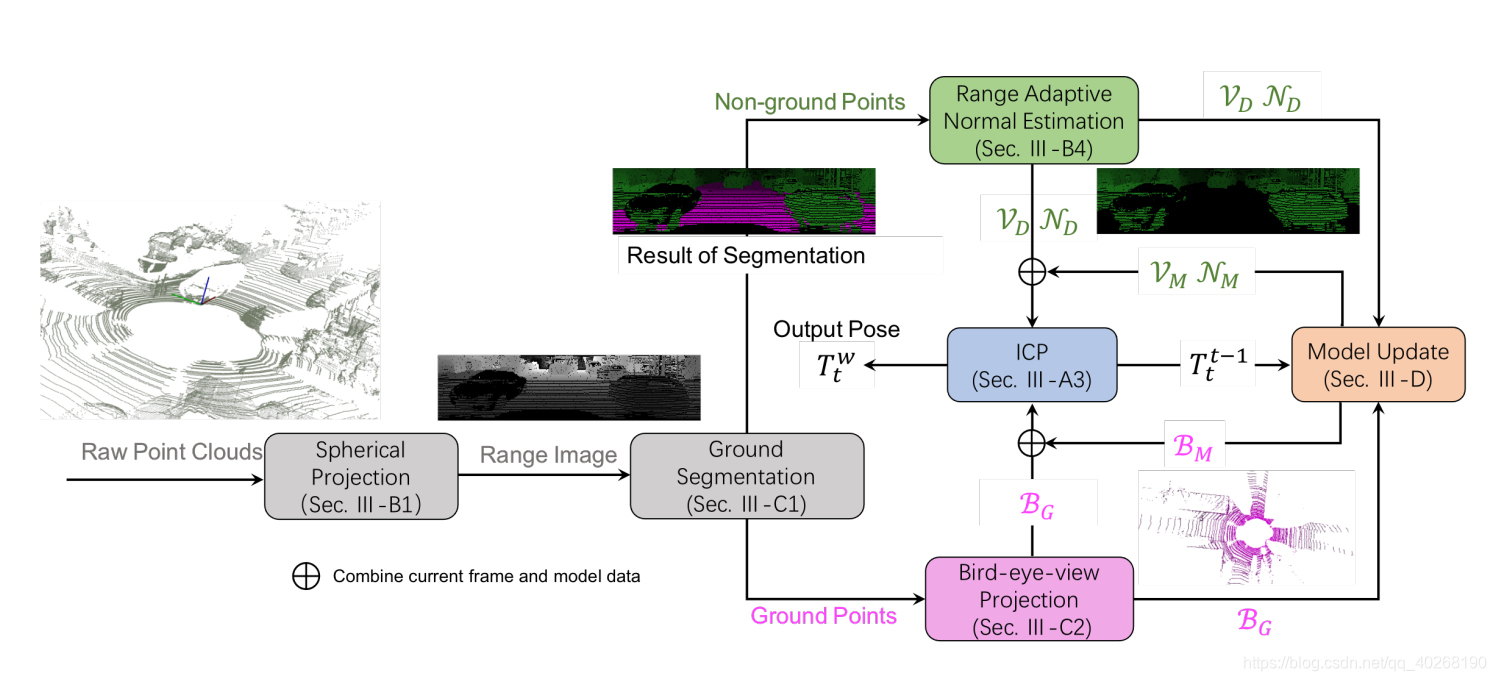
针对地面点和非地面点采用不同投影方式和法线估计方式的,基于Poing-to-Plane的Scan-to-Model的激光里程计,通过OpenMP和Cuda的并行,获得了非常高fps下的精确结果。
非地面点匹配代价
将点投影到Range Map上,然后在Range Map中估计点的邻域,邻域范围由点到激光发射器距离决定。为了保证邻域点基于奇异值的法线估计准确性,如果邻域点距离点太远或者点到估计平面距离太大,点会被认为是外点。基于3D-2D的投影,估计当前点和地图点的对应关系,根据法线估计Poing-to-Plane的匹配代价。
地面点匹配代价
在常规的Range Map的投影中,相邻地面点由于激光束与地面夹角较小,实际上距离非常远,所以对地面店,采用俯视图的投影方式。法线利用匹配点周围的五个点计算。
模型更新
把10秒内点作为匹配的模型。将历史点都投影到当前帧的Range Map和俯视图上,出现冲突时选择距离较近的点。
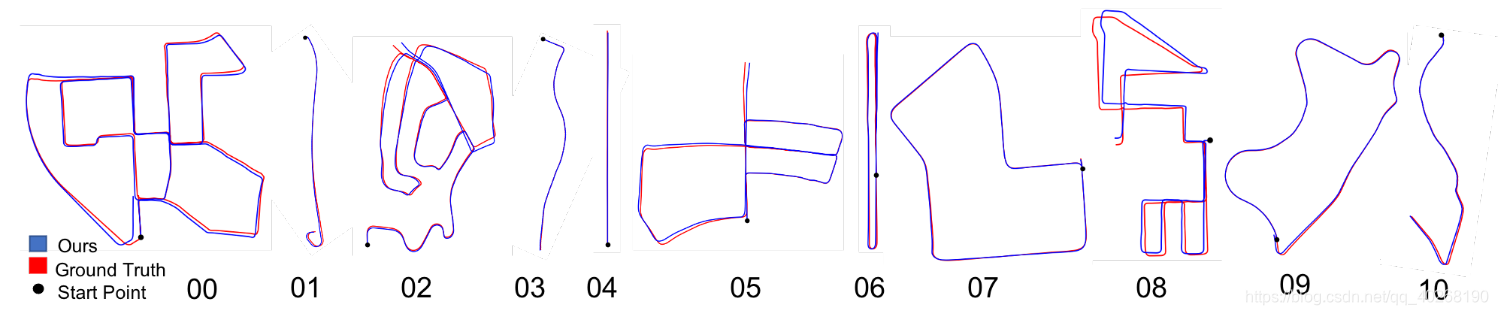
实验结果
实验结果如下,还是相当不错的。

















 1862
1862

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









