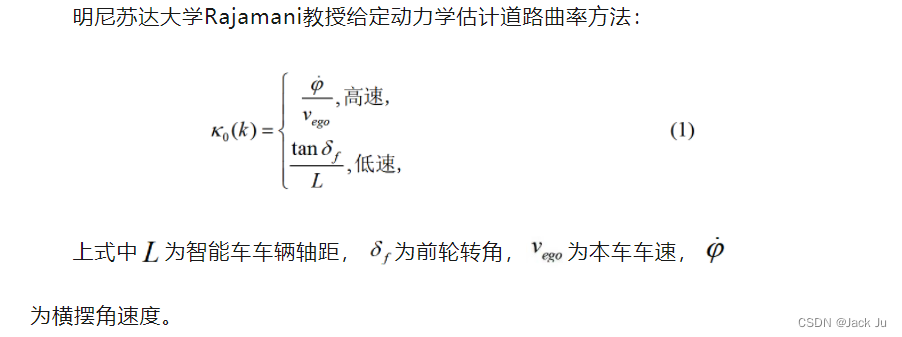
1.Introduction 在分析ADAS横向控制代码时,PID控制的输入端是当前车的轨迹和规划给的目标轨迹的横向误差,所以需要通过自车的 传感器Yawrate和SteerAngle,去计算,去估计自车轨迹的曲率,看源代码,然后通过方程近似求解出自车目前的横向距离。估计自车的轨迹的曲率一般有两种方式。 2.Algorithm 我们注意到这两种方式的使适用场景不一样,所以实际工程中需要给二者在不同车速度段做一个比例查表,融合二者的信息,在高速的时候,方法一置信度高故给的比例大,低速度段的时候,方法二的置信度高,给它的比例就会大。









 超级会员免费看
超级会员免费看

 本文介绍了在自动驾驶系统中,如何利用传感器数据(如Yawrate和SteerAngle)估计车辆轨迹的曲率。通过两种不同的方法进行曲率估算,并根据车辆速度在不同阶段采用不同权重融合信息,确保在高速和低速情况下都能获得准确的轨迹估计。
本文介绍了在自动驾驶系统中,如何利用传感器数据(如Yawrate和SteerAngle)估计车辆轨迹的曲率。通过两种不同的方法进行曲率估算,并根据车辆速度在不同阶段采用不同权重融合信息,确保在高速和低速情况下都能获得准确的轨迹估计。



















 860
860

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








