








 超级会员免费看
超级会员免费看


最近在研究自动驾驶横向控制,实际项目中,由于感知检测到的车道线曲率不准确甚至发生曲率跳变,导致突然大幅度打方向盘,于是,研究了下控制侧对感知的曲率处理是否有提升的空间。写此博客以记录学习到的技术。
道路曲率的计算方法如下,也给出了数学上的推导。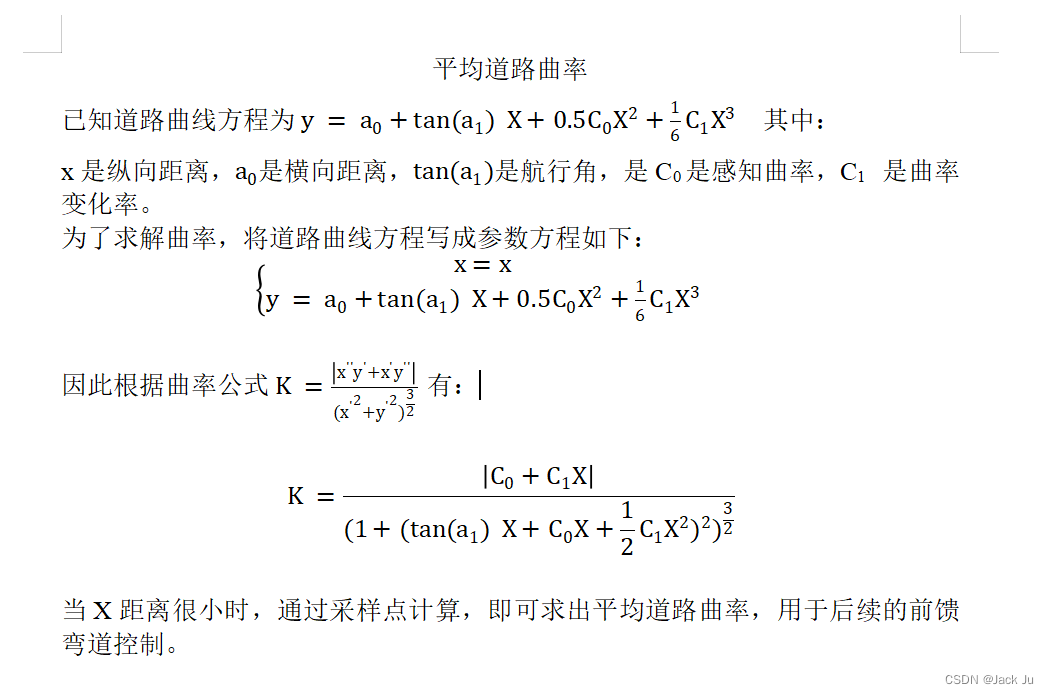 我们在使用的时候,当X距离很小时,通过采样点计算,即可求出平均道路曲率,用于后续的前馈弯道控制。
我们在使用的时候,当X距离很小时,通过采样点计算,即可求出平均道路曲率,用于后续的前馈弯道控制。
附上我的手写推导,字,凑合着看吧。。。。。

20221207 00:57:06 鞠春宇
最近在研究自动驾驶横向控制,实际项目中,由于感知检测到的车道线曲率不准确甚至发生曲率跳变,导致突然大幅度打方向盘,于是,研究了下控制侧对感知的曲率处理是否有提升的空间。写此博客以记录学习到的技术。
道路曲率的计算方法如下,也给出了数学上的推导。我们在使用的时候,当X距离很小时,通过采样点计算,即可求出平均道路曲率,用于后续的前馈弯道控制。
附上我的手写推导,字,凑合着看吧。。。。。
20221207 00:57:06 鞠春宇
 6543
6543











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



























