







ROS学习04-NVIDIA JETSON TX2安装ROS后运行小乌龟示例程序
在前面的章节我们已经初步使用NVIDIA JETSON TX2这块ARM开发板,并在上面安装了ROS
接下来我们就像所有的程序员刚开始学习编程时都要打印hello world一样,运行每个ROS自带的一个demo仿真平台turtlesim,这是一个小乌龟模拟你的机器人,虽然看起来运行起来很简单,但是里面所用到的核心知识其实就是实体机器人的所用到的某些原理!
打开第一个终端输入下面的指令
roscore
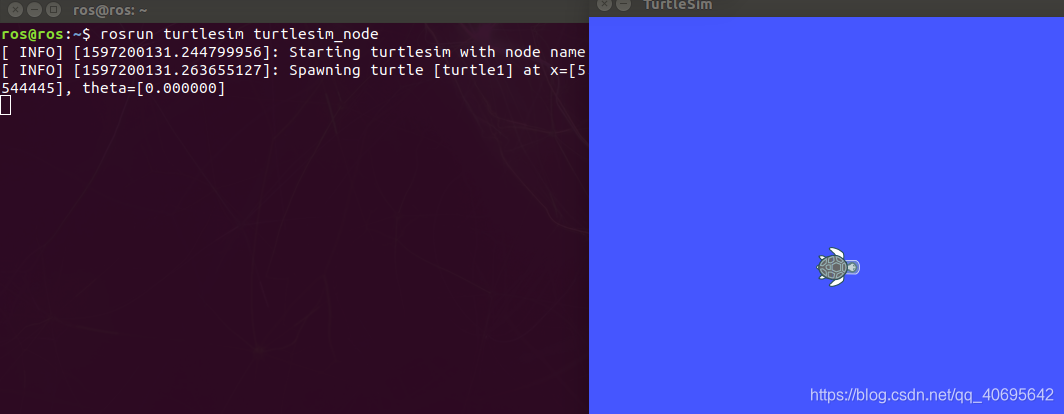
运行第二个终端
rosrun turtlesim turtlesim_node
此时会打开 2D 仿真平台,里面有一只小海龟。每次运行 turtlesim_node 会随机出现不同的小海龟
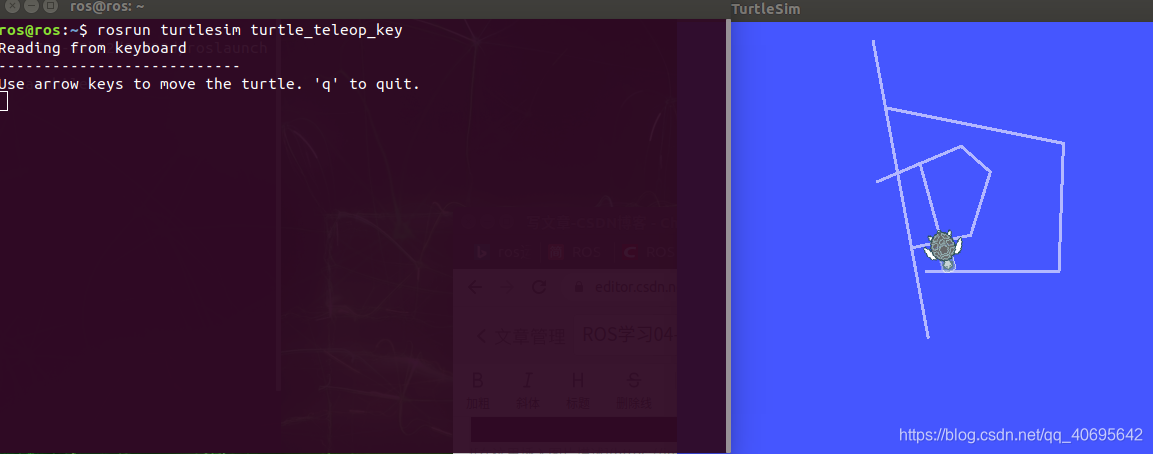
打开第三个终端,运行以下命令,打开乌龟控制窗口,可使用方向键控制乌龟运动
rosrun turtlesim turtle_teleop_key
选中控制窗口,按方向键,可看到小乌龟窗口中乌龟在运动
打开第四个终端,运行以下命令,可以看到ROS的图形化界面,展示结点的关系
rosrun rqt_graph rqt_graph

嗯哼,现在你就正式入坑ROS了!















 688
688

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









