







MATLAB小球目标追踪示例代码注释备份
%% Use Kalman Filter for Object Tracking
% This example shows how to use the |vision.KalmanFilter| object and
% |configureKalmanFilter| function to track objects.
% Copyright 2012 The MathWorks, Inc.
%%
% This example is a function with its main body at the top and helper
% routines in the form of nested functions.
%
function kalmanFilterForTracking
%% Introduction
% The Kalman filter has many uses, including applications in control,
% navigation, computer vision, and time series econometrics. This example
% illustrates how to use the Kalman filter for tracking objects and focuses
% on three important features:
%%
% * Prediction of object's future location
% * Reduction of noise introduced by inaccurate detections
% * Facilitating the process of association of multiple objects to their
% tracks
%% Challenges of Object Tracking
% Before showing the use of Kalman filter, let us first examine the
% challenges of tracking an object in a video. The following video shows a
% green ball moving from left to right on the floor.
showDetections();
%%
% The white region over the ball highlights the pixels detected using
% |vision.ForegroundDetector|, which separates moving objects from the
% background. The background subtraction only finds a portion of the ball
% because of the low contrast between the ball and the floor. In other
% words, the detection process is not ideal and introduces noise.
%
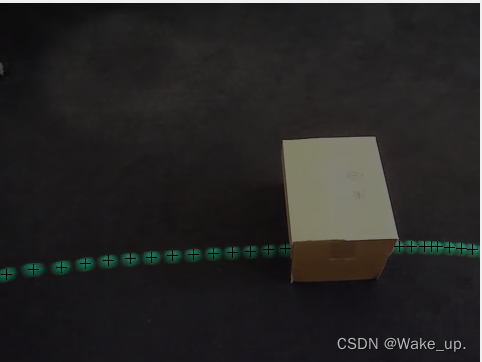
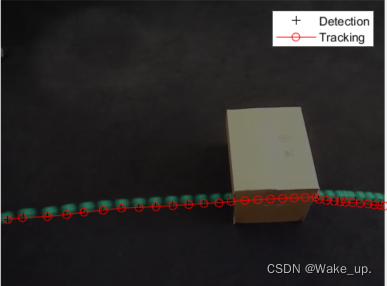
% To easily visualize the entire object trajectory, we overlay all video
% frames onto a single image. The "+" marks indicate the centroids computed
% using blob analysis.
showTrajectory(); %覆盖了所有的视频帧到一个单一的图像。“+”标记表示使用blob分析计算出的质心。
%%
% Two issues can be observed:
% # The region's center is usually different from the ball's center. In
% other words, there is an error in the measurement of the ball's
% location.
% # The location of the ball is not available when it is occluded by the
% box, i.e. the measurement is missing.
%%
% Both of these challenges can be addressed by using the Kalman filter.
% 上述两个挑战都可以通过使用卡尔曼滤波器来解决。
%% Track a Single Object Using Kalman Filter
% Using the video which was seen earlier, the |trackSingleObject| function
% shows you how to:
%%
% * Create |vision.KalmanFilter| by using |configureKalmanFilter|
% * Use |predict| and |correct| methods in a sequence to eliminate noise
% present in the tracking system
% * Use |predict| method by itself to estimate ball's location when
% it is occluded by the box
%
% The selection of the Kalman filter parameters can be challenging. The
% |configureKalmanFilter| function helps simplify this problem. More
% details about this can be found further in the example.
%%
% The |trackSingleObject| function includes nested helper functions. The
% following top-level variables are used to transfer the data between the
% nested functions.
frame = []; % A video frame
detectedLocation = []; % The detected location
trackedLocation = []; % The tracked location
label = ''; % Label for the ball
utilities = []; % Utilities used to process the video
%%
% The procedure for tracking a single object is shown below.
function trackSingleObject(param)
% Create utilities used for reading video, detecting moving objects,
% and displaying the results.
utilities = createUtilities(param);
isTrackInitialized = false;
while hasFrame(utilities.videoReader)
frame = readFrame(utilities.videoReader);
% Detect the ball.
[detectedLocation, isObjectDetected] = detectObject(frame);
if ~isTrackInitialized
if isObjectDetected
% Initialize a track by creating a Kalman filter when the ball is
% detected for the first time.
initialLocation = computeInitialLocation(param, detectedLocation);
kalmanFilter = configureKalmanFilter(param.motionModel, ...
initialLocation, param.initialEstimateError, ...
param.motionNoise, param.measurementNoise);
isTrackInitialized = true;
trackedLocation = correct(kalmanFilter, detectedLocation);
label = 'Initial';
else
trackedLocation = [];
label = '';
end
else
% Use the Kalman filter to track the ball.
if isObjectDetected % The ball was detected.
% Reduce the measurement noise by calling predict followed by
% correct.
predict(kalmanFilter);
trackedLocation = correct(kalmanFilter, detectedLocation);
label = 'Corrected';
else % The ball was missing.
% Predict the ball's location.
trackedLocation = predict(kalmanFilter);
label = 'Predicted';
end
end
annotateTrackedObject();
end % while
showTrajectory(); %红色圆圈展示预测轨迹
end
%%
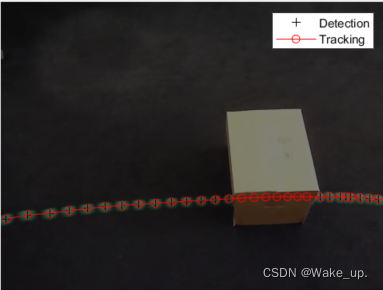
% There are two distinct scenarios that the Kalman filter addresses:
%%
% * When the ball is detected, the Kalman filter first predicts its state
% at the current video frame, and then uses the newly detected object
% location to correct its state. This produces a filtered location.
% * When the ball is missing, the Kalman filter solely relies on its
% previous state to predict the ball's current location.
%%
% You can see the ball's trajectory by overlaying all video frames.
param = getDefaultParameters(); % get Kalman configuration that works well
% for this example
trackSingleObject(param); % visualize the results
%% Explore Kalman Filter Configuration Options 【配置卡尔曼滤波器参数】
% Configuring the Kalman filter can be very challenging. Besides basic
% understanding of the Kalman filter, it often requires experimentation in
% order to come up with a set of suitable configuration parameters. The
% |trackSingleObject| function, defined above, helps you to explore the
% various configuration options offered by the |configureKalmanFilter|
% function.
%
% The |configureKalmanFilter| function returns a Kalman filter object. You
% must provide five input arguments.
%
% kalmanFilter = configureKalmanFilter(MotionModel, InitialLocation,
% InitialEstimateError, MotionNoise, MeasurementNoise)
%%
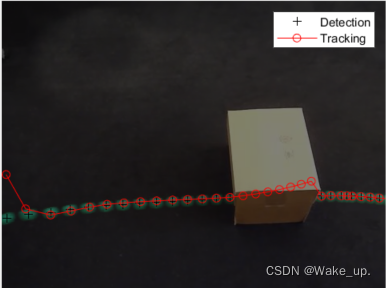
% The *MotionModel* setting must correspond to the physical characteristics
% of the object's motion. You can set it to either a constant velocity or
% constant acceleration model. The following example illustrates the
% consequences of making a sub-optimal choice. 【次优选择】
param = getDefaultParameters(); % get parameters that work well
param.motionModel = 'ConstantVelocity'; % switch from ConstantAcceleration
% to ConstantVelocity
% After switching motion models, drop noise specification entries
% corresponding to acceleration.
param.initialEstimateError = param.initialEstimateError(1:2);
param.motionNoise = param.motionNoise(1:2);
trackSingleObject(param); % visualize the results
%%
% Notice that the ball emerged in a spot that is quite different from the
% predicted location. From the time when the ball was released, it was
% subject to constant deceleration due to resistance from the carpet.
% Therefore, constant acceleration model was a better choice. If you kept
% the constant velocity model, the tracking results would be sub-optimal no
% matter what you selected for the other values.
%%
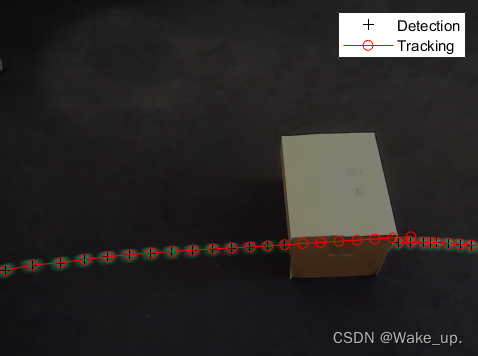
% Typically, you would set the *InitialLocation* input to the location
% where the object was first detected. You would also set the
% *InitialEstimateError* vector to large values since the initial state may
% be very noisy given that it is derived from a single detection. The
% following figure demonstrates the effect of misconfiguring these
% parameters. 【错误示范】
param = getDefaultParameters(); % get parameters that work well
param.initialLocation = [0, 0]; % location that's not based on an actual detection
param.initialEstimateError = 100*ones(1,3); % use relatively small values
trackSingleObject(param); % visualize the results
%%
% With the misconfigured parameters, it took a few steps before the
% locations returned by the Kalman filter align with the actual trajectory
% of the object.
%%
% The values for *MeasurementNoise* should be selected based on the
% detector's accuracy. Set the measurement noise to larger values for a
% less accurate detector. The following example illustrates the noisy
% detections of a misconfigured segmentation threshold. Increasing the
% measurement noise causes the Kalman filter to rely more on its internal
% state rather than the incoming measurements, and thus compensates for the
% detection noise.【错误示范】
param = getDefaultParameters();
param.segmentationThreshold = 0.0005; % smaller value resulting in noisy detections
param.measurementNoise = 12500; % increase the value to compensate
% for the increase in measurement noise
trackSingleObject(param); % visualize the results
%%
% Typically objects do not move with constant acceleration or constant
% velocity. You use the *MotionNoise* to specify the amount of deviation
% from the ideal motion model. When you increase the motion noise, the
% Kalman filter relies more heavily on the incoming measurements than on
% its internal state. Try experimenting with *MotionNoise* parameter to
% learn more about its effects.
%%
% Now that you are familiar with how to use the Kalman filter and how to
% configure it, the next section will help you learn how it can be used for
% multiple object tracking.
%%
% *Note:* In order to simplify the configuration process in the above
% examples, we used the |configureKalmanFilter| function. This function
% makes several assumptions. See the function's documentation for details.
% If you require greater level of control over the configuration process,
% you can use the |vision.KalmanFilter| object directly.
%% Track Multiple Objects Using Kalman Filter
%
% Tracking multiple objects poses several additional challenges:
%%
% * Multiple detections must be associated with the correct tracks
% * You must handle new objects appearing in a scene
% * Object identity must be maintained when multiple objects merge into a
% single detection
%
% The |vision.KalmanFilter| object together with the
% |assignDetectionsToTracks| function can help to solve the problems of
%%
% * Assigning detections to tracks
% * Determining whether or not a detection corresponds to a new object,
% in other words, track creation
% * Just as in the case of an occluded single object, prediction can be
% used to help separate objects that are close to each other
%
% To learn more about using Kalman filter to track multiple objects, see
% the example titled
% <docid:vision_ug#example-MotionBasedMultiObjectTrackingExample
% Motion-Based Multiple Object Tracking>.
%% Utility Functions Used in the Example
% Utility functions were used for detecting the objects and displaying the
% results. This section illustrates how the example implemented these
% functions.
%%
% Get default parameters for creating Kalman filter and for segmenting the
% ball.
function param = getDefaultParameters
param.motionModel = 'ConstantAcceleration';
param.initialLocation = 'Same as first detection';
param.initialEstimateError = 1E5 * ones(1, 3);
param.motionNoise = [25, 10, 1];
param.measurementNoise = 25;
param.segmentationThreshold = 0.05;
end
%%
% Detect and annotate the ball in the video.
function showDetections()
param = getDefaultParameters(); %获取创建卡尔曼过滤器和分割球的默认参数
utilities = createUtilities(param); %创建用于读取视频、检测移动对象和显示结果
trackedLocation = [];
idx = 0;
while hasFrame(utilities.videoReader)
frame = readFrame(utilities.videoReader);
detectedLocation = detectObject(frame); %检测当前视频帧中的球
% Show the detection result for the current video frame.
annotateTrackedObject(); %显示当前检测和跟踪结果
% To highlight the effects of the measurement noise, show the detection
% results for the 40th frame in a separate figure.
idx = idx + 1;
if idx == 40
combinedImage = max(repmat(utilities.foregroundMask, [1,1,3]), im2single(frame));
figure, imshow(combinedImage);
end
end % while
% Close the window which was used to show individual video frame.
uiscopes.close('All');
end
%%
% Detect the ball in the current video frame.
function [detection, isObjectDetected] = detectObject(frame)
grayImage = rgb2gray(im2single(frame));
utilities.foregroundMask = step(utilities.foregroundDetector, grayImage);
detection = step(utilities.blobAnalyzer, utilities.foregroundMask);
if isempty(detection)
isObjectDetected = false;
else
% To simplify the tracking process, only use the first detected object.
detection = detection(1, :);
isObjectDetected = true;
end
end
%%
% Show the current detection and tracking results.
function annotateTrackedObject() % 显示当前检测和跟踪结果
accumulateResults();
% Combine the foreground mask with the current video frame in order to
% show the detection result.
combinedImage = max(repmat(utilities.foregroundMask, [1,1,3]), im2single(frame));
if ~isempty(trackedLocation)
shape = 'circle';
region = trackedLocation;
region(:, 3) = 5;
combinedImage = insertObjectAnnotation(combinedImage, shape, ...
region, {label}, 'Color', 'red');
end
step(utilities.videoPlayer, combinedImage);
end
%%
% Show trajectory of the ball by overlaying all video frames on top of
% each other.
function showTrajectory
% Close the window which was used to show individual video frame.
uiscopes.close('All');
% Create a figure to show the processing results for all video frames.
figure; imshow(utilities.accumulatedImage/2+0.5); hold on;
plot(utilities.accumulatedDetections(:,1), ...
utilities.accumulatedDetections(:,2), 'k+');
if ~isempty(utilities.accumulatedTrackings)
plot(utilities.accumulatedTrackings(:,1), ...
utilities.accumulatedTrackings(:,2), 'r-o');
legend('Detection', 'Tracking');
end
end
%%
% Accumulate video frames, detected locations, and tracked locations to
% show the trajectory of the ball.
function accumulateResults()
utilities.accumulatedImage = max(utilities.accumulatedImage, frame);
utilities.accumulatedDetections ...
= [utilities.accumulatedDetections; detectedLocation];
utilities.accumulatedTrackings ...
= [utilities.accumulatedTrackings; trackedLocation];
end
%%
% For illustration purposes, select the initial location used by the Kalman
% filter.
function loc = computeInitialLocation(param, detectedLocation)
if strcmp(param.initialLocation, 'Same as first detection')
loc = detectedLocation;
else
loc = param.initialLocation;
end
end
%%
% Create utilities for reading video, detecting moving objects, and
% displaying the results.
function utilities = createUtilities(param)
% Create System objects for reading video, displaying video, extracting
% foreground, and analyzing connected components.
utilities.videoReader = VideoReader('singleball.mp4');
utilities.videoPlayer = vision.VideoPlayer('Position', [100,100,500,400]);
utilities.foregroundDetector = vision.ForegroundDetector(...
'NumTrainingFrames', 10, 'InitialVariance', param.segmentationThreshold);
utilities.blobAnalyzer = vision.BlobAnalysis('AreaOutputPort', false, ...
'MinimumBlobArea', 70, 'CentroidOutputPort', true);
utilities.accumulatedImage = 0;
utilities.accumulatedDetections = zeros(0, 2);
utilities.accumulatedTrackings = zeros(0, 2);
end
end















 2061
2061











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









