







1.驱动板的原理图如下:
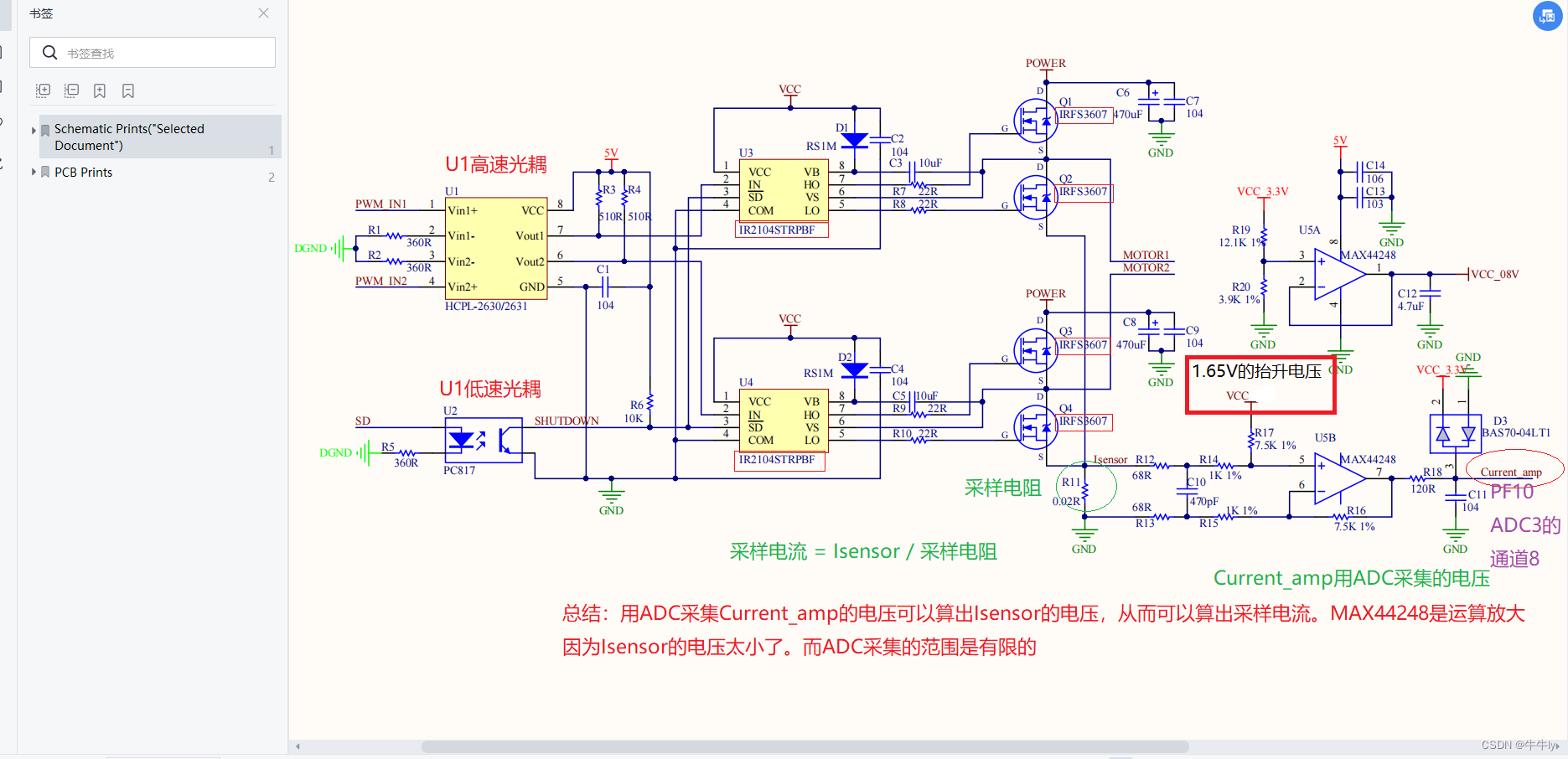
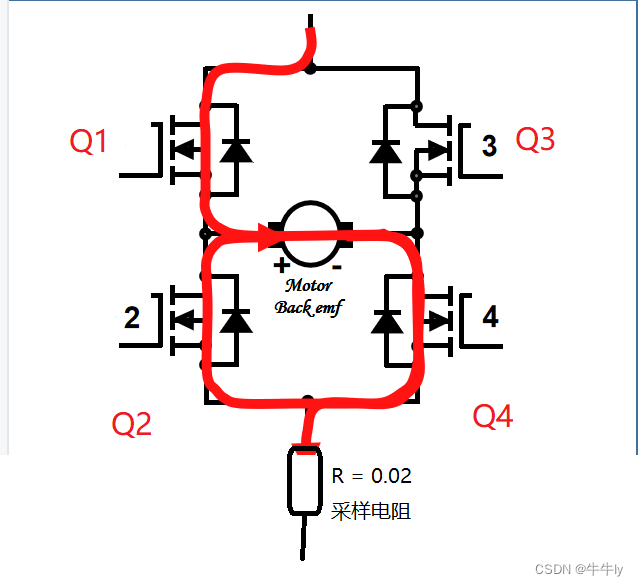
驱动板怎么驱动电机就简单说下采用的是单极模式。正转时Q1,Q2接PWM信号并且是互补的PWM信号Q1接PWM,Q2接PWMN.而Q3截止,Q4导通。Q1与Q4导通有电流从左到右流。当Q1截止时。Q2与Q4导通由于自感电动势的原因也会有电流从左到右流,但是电流是衰减的。反转时Q3,Q4接PWM。Q1截止Q2导通。电流从右到左流的。(具体跟正转一样的分析)。
图中的Current_amp点,是电流采集通道,DC-BUS是电压采集通道。分别接在对应MCU的PF10(ADC3的通道8),PF8(ADC3的通道6)。Currennt_amp点采集到的电压可以求出采样电流的值。
2.dome列子
1.电压,电流采集
ADC.h
#ifndef __ADC_H__
#define __ADC_H__
#include "stm32f4xx_hal.h"
// 注意:用作ADC采集的IO必须没有复用,否则采集电压会有影响
/********************ADC输入通道(引脚)配置**************************/
#define ADCx_RCC_CLK_ENABLE() __HAL_RCC_ADC3_CLK_ENABLE()
#define ADCx_RCC_CLK_DISABLE() __HAL_RCC_ADC3_CLK_DISABLE()
#define ADCx ADC3
#define ADC_CURRENT_CHANNEL ADC_CHANNEL_8
#define ADC_VOLT_CHANNEL ADC_CHANNEL_6
#define ADC_OVP_IRQx ADC_IRQn
#define ADC_OVP_IRQHandler ADC_IRQHandler
#define DMAx_RCC_CLK_ENABLE() __HAL_RCC_DMA2_CLK_ENABLE()
#define ADCx_DMA_IRQx DMA2_Stream0_IRQn
#define ADCx_DMA_IRQx_Handler DMA2_Stream0_IRQHandler
#define DMAx_Stream_x DMA2_Stream0
#define DMAx_CHANNEL_x DMA_CHANNEL_2
#define ADC_CUR_GPIO_ClK_ENABLE() __HAL_RCC_GPIOF_CLK_ENABLE()
#define ADC_CUR_GPIO GPIOF
#define ADC_CUR_GPIO_PIN GPIO_PIN_10
#define ADC_VOLT_GPIO_ClK_ENABLE() __HAL_RCC_GPIOF_CLK_ENABLE()
#define ADC_VOLT_GPIO GPIOF
#define ADC_VOLT_GPIO_PIN GPIO_PIN_8
// Vcurrent_amp=1.65v + 7.5K/(1K+68)VIsensor 根据公式求VIsensor电压从而求出采样电流
#define VOLT_REF 3.3f // ADC参考电压
/* 根据驱动板设置放大倍数 和 采样电阻 */
#define GAIN 6.8f // 放大倍数 因为VIsensor太小ADC采集不到进行放大根据上面公式求出
#define SAMPLING_RES 0.01f // 采样电阻
/** 电压分辨率 = ADC(Hex) * 3.3 / 2^n * 1000(mV) 单位是mV
* STM32的ADC分辨率是n = 12bit,电机控制脉冲是20KHz,理论上采样率40Kz就可以正确采集到波形计算电流,
* 根据过采样理论:实际采样率 > 40KHz * 4^2,所以可以提高分辨率到14bit.所以这里用 2^14 = 16384
*/
#define VOLT_RESOLUTION ((float)((VOLT_REF/(float)(16384))*(float)1000)) // ADC 电压分辨率,单位:0.201mV
#define VOLTBUS_RESOLUTION ((float)( 3.3f/(float)4096) * (42.4f+42.4f) / 3.9f)
/* 总线电压参数相关 */
#define VOLT_MAX 60.0f // 最大电压值
#define VOLT_MIN 12.0f
/* 总线分压电阻:3.9 kΩ,80.4 kΩ 把最大电压与最小电压转换为16进制*/
#define VOLT_LIMIT_MAX (int32_t)((((VOLT_MAX * 3.9f) / (3.9f+42.4f) ) /3.9f) *4096.0f)
#define VOLT_LIMIT_MIN (int32_t)((((VOLT_MIN * 3.9f) / (3.9f+42.4f) ) /3.9f) *4096.0f) //分压电阻:42.4kΩ.3.9kΩ
/* 扩展变量 ------------------------------------------------------------------*/
extern ADC_HandleTypeDef hadcx;
extern DMA_HandleTypeDef hdma_adcx;
/* 函数声明 ------------------------------------------------------------------*/
void MX_ADCx_Init(void);
void MX_DMA_Init(void) ;
void SetChannelAsRank1(ADC_HandleTypeDef* hadc,uint32_t Channel);
#endif /* __ADC_H__ */
ADC.c
#include "adc/bsp_adc.h"
ADC_HandleTypeDef hadcx; // ADC结构体
DMA_HandleTypeDef hdma_adcx; // DMA结构体
__IO int32_t OffSetHex = 0;
void MX_ADCx_Init(void)
{
ADC_ChannelConfTypeDef sConfig;
ADC_AnalogWDGConfTypeDef AWDGConfig; // ADC看门狗结构体
/* 外设时钟使能 */
ADCx_RCC_CLK_ENABLE();
hadcx.Instance = ADCx;
hadcx.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;
hadcx.Init.Resolution = ADC_RESOLUTION_12B;
hadcx.Init.ScanConvMode = DISABLE;
hadcx.Init.ContinuousConvMode = ENABLE;
hadcx.Init.DiscontinuousConvMode = DISABLE;
hadcx.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadcx.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadcx.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadcx.Init.NbrOfConversion = 1;
hadcx.Init.DMAContinuousRequests = ENABLE;
hadcx.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
HAL_ADC_Init(&hadcx);
/* 配置电流采样通道 */
sConfig.Channel = ADC_CURRENT_CHANNEL;
sConfig.Offset = 0;
sConfig.Rank = 0x01; // 先采集电流通道
sConfig.SamplingTime = ADC_SAMPLETIME_28CYCLES;
HAL_ADC_ConfigChannel(&hadcx,&sConfig);
/* 配置总线电压采集 */
/* 模拟看门狗配置 */
AWDGConfig.Channel = ADC_VOLT_CHANNEL; // 哪个通道启动看门狗
AWDGConfig.HighThreshold = VOLT_LIMIT_MAX; // 设置上限
AWDGConfig.LowThreshold = VOLT_LIMIT_MIN; // 设置下限
AWDGConfig.ITMode = ENABLE; // 开启中断
AWDGConfig.WatchdogMode = ADC_ANALOGWATCHDOG_SINGLE_REG; // 看门狗模式
AWDGConfig.WatchdogNumber = 0; // Reserved for future use, can be set to 0
HAL_ADC_AnalogWDGConfig(&hadcx,&AWDGConfig);
sConfig.Channel = ADC_VOLT_CHANNEL;
sConfig.Offset = 0;
sConfig.Rank = 0x02;
sConfig.SamplingTime = ADC_SAMPLETIME_28CYCLES;
HAL_ADC_ConfigChannel(&hadcx,&sConfig);
HAL_NVIC_SetPriority(ADC_OVP_IRQx, 0, 1);
HAL_NVIC_EnableIRQ(ADC_OVP_IRQx);
}
void MX_DMA_Init(void)
{
/* 使能外设时钟 */
DMAx_RCC_CLK_ENABLE();
hdma_adcx.Instance = DMAx_Stream_x;
hdma_adcx.Init.Channel = DMAx_CHANNEL_x;
hdma_adcx.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_adcx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_adcx.Init.MemInc = DMA_MINC_ENABLE;
hdma_adcx.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
hdma_adcx.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_adcx.Init.Mode = DMA_CIRCULAR;
hdma_adcx.Init.Priority = DMA_PRIORITY_HIGH;
hdma_adcx.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
HAL_DMA_Init(&hdma_adcx);
__HAL_LINKDMA(&hadcx,DMA_Handle,hdma_adcx);
/* 外设中断优先级配置和使能中断 */
HAL_NVIC_SetPriority(ADCx_DMA_IRQx, 1, 1);
HAL_NVIC_EnableIRQ(ADCx_DMA_IRQx);
}
/**
* 函数功能: ADC外设初始化配置
* 输入参数: hadc:AD外设句柄类型指针
* 返 回 值: 无
* 说 明: 该函数被HAL库内部调用
*/
void HAL_ADC_MspInit(ADC_HandleTypeDef* hadc)
{
GPIO_InitTypeDef GPIO_InitStruct;
if(hadc->Instance==ADCx)
{
/* AD转换通道引脚时钟使能 */
ADC_CUR_GPIO_ClK_ENABLE();
/* AD转换通道引脚初始化 */
GPIO_InitStruct.Pin = ADC_CUR_GPIO_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(ADC_CUR_GPIO, &GPIO_InitStruct);
GPIO_InitStruct.Pin = ADC_VOLT_GPIO_PIN;
HAL_GPIO_Init(ADC_VOLT_GPIO, &GPIO_InitStruct);
}
}
/*
* 函数功能: 设置AD转换通道的转换顺序为1
* 输入参数: hadc ADC句柄 , Channel可以是ADC_VOLT_CHANNEL,ADC_CURRENT_CHANNEL
* 返 回 值: 无
* 说 明: 无
*/
void SetChannelAsRank1(ADC_HandleTypeDef* hadc,uint32_t Channel)
{
ADC_ChannelConfTypeDef sConfig;
if(Channel == ADC_VOLT_CHANNEL)
{
/* 配置电压通道 */
sConfig.Channel = ADC_VOLT_CHANNEL;
sConfig.Offset = 0;
sConfig.Rank = 0x01;
sConfig.SamplingTime = ADC_SAMPLETIME_28CYCLES;
HAL_ADC_ConfigChannel(&hadcx,&sConfig);
/* 配置电流通道 */
sConfig.Channel = ADC_CURRENT_CHANNEL;
sConfig.Rank = 0x02;
HAL_ADC_ConfigChannel(&hadcx,&sConfig);
}
else
{
/* 配置电流通道 */
sConfig.Channel = ADC_CURRENT_CHANNEL;
sConfig.Offset = 0;
sConfig.Rank = 0x01;
sConfig.SamplingTime = ADC_SAMPLETIME_28CYCLES;
HAL_ADC_ConfigChannel(&hadcx,&sConfig);
/* 配置电压通道 */
sConfig.Channel = ADC_VOLT_CHANNEL;
sConfig.Rank = 0x02;
HAL_ADC_ConfigChannel(&hadcx,&sConfig);
}
}
time.h 做互补PWM
#ifndef __BDCMOTOR_TIM_H__
#define __BDCMOTOR_TIM_H__
/* 包含头文件 ----------------------------------------------------------------*/
#include "stm32f4xx_hal.h"
/* 类型定义 ------------------------------------------------------------------*/
/* 宏定义 --------------------------------------------------------------------*/
#define BDCMOTOR_TIMx TIM1
#define BDCMOTOR_TIM_RCC_CLK_ENABLE() __HAL_RCC_TIM1_CLK_ENABLE()
#define BDCMOTOR_TIM_RCC_CLK_DISABLE() __HAL_RCC_TIM1_CLK_DISABLE()
#define BDCMOTOR_TIM_CH1_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE() // 输出PWM脉冲给电机控制器的的IN引脚
#define BDCMOTOR_TIM_CH1_PORT GPIOA // CH1和CH1N两个引脚配套使用
#define BDCMOTOR_TIM_CH1_PIN GPIO_PIN_8 // 如果电机接在驱动器的OUT1和OUT2端子上
#define BDCMOTOR_TIM_CH1N_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() // CH1和CH1N对应接在IN1和IN2
#define BDCMOTOR_TIM_CH1N_PORT GPIOB // 如果电机接在驱动器的OUT3和OUT4端子上
#define BDCMOTOR_TIM_CH1N_PIN GPIO_PIN_13 // CH1和CH1N对应接在IN3和IN4
#define SHUTDOWN_GPIO_CLK_ENABLE() __HAL_RCC_GPIOH_CLK_ENABLE() // CH1和CH1N对应接在IN1和IN2
#define SHUTDOWN_PORT GPIOH // 如果电机接在驱动器的OUT3和OUT4端子上
#define SHUTDOWN_PIN GPIO_PIN_6 // CH1和CH1N对应接在IN3和IN4
#define ENABLE_MOTOR() HAL_GPIO_WritePin(SHUTDOWN_PORT,SHUTDOWN_PIN,GPIO_PIN_RESET)
#define SHUTDOWN_MOTOR() HAL_GPIO_WritePin(SHUTDOWN_PORT,SHUTDOWN_PIN,GPIO_PIN_SET)
#define BDCMOTOR_TIM_CC_IRQx TIM1_CC_IRQn
#define BDCMOTOR_TIM_CC_IRQxHandler TIM1_CC_IRQHandler
// 定义定时器预分频,定时器实际时钟频率为:168MHz/(BDCMOTOR_TIMx_PRESCALER+1)
#define BDCMOTOR_TIM_PRESCALER 1 // 实际时钟频率为:84MHz
// 定义定时器周期,PWM频率为:168MHz/(BDCMOTOR_TIMx_PRESCALER+1)/(BDCMOTOR_TIM_PERIOD+1)
#define BDCMOTOR_TIM_PERIOD 4199 // PWM频率为84MHz/(4199+1)=20KHz
#define BDCMOTOR_DUTY_ZERO (((BDCMOTOR_TIM_PERIOD+1)>>1)-1) // 0%占空比
#define BDCMOTOR_DUTY_FULL (BDCMOTOR_TIM_PERIOD-100) // 100%占空比
#define VC_OFFSET
// 定义高级定时器重复计数寄存器值
// 实际PWM频率为:168MHz/(BDCMOTOR_TIMx_PRESCALER+1)/(BDCMOTOR_TIM_PERIOD+1)/(BDCMOTOR_TIM_REPETITIONCOUNTER+1)
#define BDCMOTOR_TIM_REPETITIONCOUNTER 0
/* 扩展变量 ------------------------------------------------------------------*/
extern TIM_HandleTypeDef htimx_BDCMOTOR;
extern __IO int16_t PWM_Duty;
/* 函数声明 ------------------------------------------------------------------*/
void BDCMOTOR_TIMx_Init(void);
#endif /* __BDCMOTOR_TIM_H__ */timer.c
#include "DCMotor/bsp_BDCMotor.h"
TIM_HandleTypeDef htimx_BDCMOTOR;
__IO int16_t PWM_Duty=BDCMOTOR_DUTY_ZERO;// 占空比:PWM_Duty/BDCMOTOR_TIM_PERIOD*100%
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
{
/* BDCMOTOR相关GPIO初始化配置 */
if(htim == &htimx_BDCMOTOR)
{
GPIO_InitTypeDef GPIO_InitStruct;
/* 引脚端口时钟使能 */
__HAL_RCC_GPIOE_CLK_ENABLE();
BDCMOTOR_TIM_CH1_GPIO_CLK_ENABLE();
BDCMOTOR_TIM_CH1N_GPIO_CLK_ENABLE();
SHUTDOWN_GPIO_CLK_ENABLE();
/* BDCMOTOR输出脉冲控制引脚IO初始化 */
GPIO_InitStruct.Pin = BDCMOTOR_TIM_CH1_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM1;
HAL_GPIO_Init(BDCMOTOR_TIM_CH1_PORT, &GPIO_InitStruct);
GPIO_InitStruct.Pin = BDCMOTOR_TIM_CH1N_PIN;
HAL_GPIO_Init(BDCMOTOR_TIM_CH1N_PORT, &GPIO_InitStruct);
__HAL_RCC_GPIOE_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_11;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
GPIO_InitStruct.Pin = SHUTDOWN_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = 0;
HAL_GPIO_Init(SHUTDOWN_PORT, &GPIO_InitStruct);
/* 使能电机控制引脚 */
ENABLE_MOTOR();
}
}
/**
* 函数功能: BDCMOTOR定时器初始化
* 输入参数: 无
* 返 回 值: 无
* 说 明: 无
*/
void BDCMOTOR_TIMx_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig; // 定时器时钟
TIM_OC_InitTypeDef sConfigOC;
TIM_BreakDeadTimeConfigTypeDef sBDTConfig; // 定时器死区时间比较输出
// TIM_MasterConfigTypeDef sMasterConfig;
/* 基本定时器外设时钟使能 */
BDCMOTOR_TIM_RCC_CLK_ENABLE();
/* 定时器基本环境配置 */
htimx_BDCMOTOR.Instance = BDCMOTOR_TIMx; // 定时器编号
htimx_BDCMOTOR.Init.Prescaler = BDCMOTOR_TIM_PRESCALER; // 定时器预分频器
htimx_BDCMOTOR.Init.CounterMode = TIM_COUNTERMODE_UP; // 计数方向:向上计数
htimx_BDCMOTOR.Init.Period = BDCMOTOR_TIM_PERIOD; // 定时器周期
htimx_BDCMOTOR.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1; // 时钟分频
htimx_BDCMOTOR.Init.RepetitionCounter = BDCMOTOR_TIM_REPETITIONCOUNTER; // 重复计数器
/* 初始化定时器比较输出环境 */
HAL_TIM_PWM_Init(&htimx_BDCMOTOR);
/* 定时器时钟源配置 */
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; // 使用内部时钟源
HAL_TIM_ConfigClockSource(&htimx_BDCMOTOR, &sClockSourceConfig);
sBDTConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE ;
sBDTConfig.BreakPolarity = TIM_BREAKPOLARITY_LOW ;
sBDTConfig.BreakState = TIM_BREAK_DISABLE ;
sBDTConfig.DeadTime = 0 ;
sBDTConfig.LockLevel = TIM_LOCKLEVEL_OFF ;
sBDTConfig.OffStateIDLEMode= TIM_OSSI_DISABLE ;
sBDTConfig.OffStateRunMode = TIM_OSSR_ENABLE ;
HAL_TIMEx_ConfigBreakDeadTime(&htimx_BDCMOTOR,&sBDTConfig);
/* 定时器比较输出配置 */
sConfigOC.OCMode = TIM_OCMODE_PWM1; // 比较输出模式:PWM1模式
sConfigOC.Pulse = PWM_Duty; // 占空比
sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW; // 输出极性
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_LOW; // 互补通道输出极性
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE; // 快速模式
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET; // 空闲电平
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET; // 互补通道空闲电平
HAL_TIM_PWM_ConfigChannel(&htimx_BDCMOTOR, &sConfigOC, TIM_CHANNEL_1);
}
main.c
#include "stm32f4xx_hal.h"
#include "DCMotor/bsp_BDCMotor.h"
#include "key/bsp_key.h"
#include "usart/bsp_usartx.h"
#include "adc/bsp_adc.h"
#include "stdlib.h"
#define ADC_Base 8 // 取2的整数倍作为缓存区大小,得到14bits的ADC值
#define ADC_BUFFER 1024 // 采样数据缓存区
// 用于保存转换计算后的数值
__IO float ADC_VoltValue;
__IO float ADC_VoltBus; /* PF8电压的采集值 */
// AD转换结果值
__IO int16_t ADC_ConvValueHex[ADC_BUFFER]; // AD转换结果
__IO int32_t ADCSum = 0; // ADC结果累加值
__IO int32_t AverSum = 0; // 平均值的累加值
__IO int32_t AverCnt = 0; // 平均值的计数器
__IO uint32_t OffsetCnt_Flag = 0 ; // 偏差值的计数器标志
uint32_t Motor_Dir = 0 ; // 电机方向
extern __IO int32_t OffSetHex ; // 偏差值
extern __IO uint32_t uwTick;
__IO int32_t CaptureNumber = 0; // 输入捕获数
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
__HAL_RCC_PWR_CLK_ENABLE(); // 使能PWR时钟
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); // 设置调压器输出电压级别1
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; // 外部晶振,8MHz
RCC_OscInitStruct.HSEState = RCC_HSE_ON; // 打开HSE
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; // 打开PLL
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; // PLL时钟源选择HSE
RCC_OscInitStruct.PLL.PLLM = 8; // 8分频MHz
RCC_OscInitStruct.PLL.PLLN = 336; // 336倍频
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; // 2分频,得到168MHz主时钟
RCC_OscInitStruct.PLL.PLLQ = 7; // USB/SDIO/随机数产生器等的主PLL分频系数
HAL_RCC_OscConfig(&RCC_OscInitStruct);
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; // 系统时钟:168MHz
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; // AHB时钟: 168MHz
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; // APB1时钟:42MHz
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; // APB2时钟:84MHz
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5);
HAL_RCC_EnableCSS(); // 使能CSS功能,优先使用外部晶振,内部时钟源为备用
// HAL_RCC_GetHCLKFreq()/1000 1ms中断一次
// HAL_RCC_GetHCLKFreq()/100000 10us中断一次
// HAL_RCC_GetHCLKFreq()/1000000 1us中断一次
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000); // 配置并启动系统滴答定时器
/* 系统滴答定时器时钟源 */
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* 系统滴答定时器中断优先级配置 */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
int main(void)
{
/* 复位所有外设,初始化Flash接口和系统滴答定时器 */
HAL_Init();
/* 配置系统时钟 */
SystemClock_Config();
/* 串口初始化 */
MX_USARTx_Init();
/* 按键初始化 */
KEY_GPIO_Init();
/* 高级控制定时器初始化并配置PWM输出功能 */
BDCMOTOR_TIMx_Init();
/* 启动定时器 */
HAL_TIM_Base_Start(&htimx_BDCMOTOR);
/* 启动定时器通道和互补通道PWM输出 */
PWM_Duty = 0;
__HAL_TIM_SET_COMPARE(&htimx_BDCMOTOR,TIM_CHANNEL_1,PWM_Duty); // 0%
/* ADC-DMA 初始化 */
HAL_Delay(100);
MX_ADCx_Init();
MX_DMA_Init();
/* 启动AD转换并使能DMA传输和中断 */
HAL_ADC_Start_DMA(&hadcx,(uint32_t*)ADC_ConvValueHex,ADC_BUFFER);
__HAL_DMA_DISABLE_IT(&hdma_adcx,DMA_IT_HT); // 失能一些DMA中断标志
__HAL_DMA_DISABLE_IT(&hdma_adcx,DMA_IT_TE);
__HAL_DMA_DISABLE_IT(&hdma_adcx,DMA_IT_FE);
__HAL_DMA_DISABLE_IT(&hdma_adcx,DMA_IT_DME);
/* 无限循环 */
while (1)
{
/* 停止按钮 */
if(KEY1_StateRead()==KEY_DOWN)
{
HAL_TIM_PWM_Start(&htimx_BDCMOTOR,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
__HAL_TIM_SET_COMPARE(&htimx_BDCMOTOR,TIM_CHANNEL_1,0); // 0%
}
if(KEY2_StateRead()==KEY_DOWN)
{
HAL_TIM_PWM_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1); // 停止输出
}
if(KEY3_StateRead()==KEY_DOWN)//加速
{
PWM_Duty += 200;
if(PWM_Duty >=BDCMOTOR_DUTY_FULL)
PWM_Duty = BDCMOTOR_DUTY_FULL;
__HAL_TIM_SET_COMPARE(&htimx_BDCMOTOR,TIM_CHANNEL_1,PWM_Duty);
}
if(KEY4_StateRead()==KEY_DOWN)//减速
{
PWM_Duty -= 200;
if(PWM_Duty <=0)
PWM_Duty = 0;
__HAL_TIM_SET_COMPARE(&htimx_BDCMOTOR,TIM_CHANNEL_1,PWM_Duty);
}
if(KEY5_StateRead()==KEY_DOWN)// 换方向
{
if(Motor_Dir)
{
Motor_Dir = 0;
HAL_TIM_PWM_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htimx_BDCMOTOR,TIM_CHANNEL_1);
}
else
{
Motor_Dir = 1;
HAL_TIM_PWM_Start(&htimx_BDCMOTOR,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
}
}
}
}
/**
* 函数功能: 系统滴答定时器中断回调函数
* 输入参数: 无
* 返 回 值: 无
* 说 明: 每发生一次滴答定时器中断进入该回调函数一次
*/
void HAL_SYSTICK_Callback(void)
{
__IO int32_t ADC_Resul= 0;
__IO float Volt_Result = 0;
__IO float ADC_CurrentValue;
/* 数据反馈周期是50ms,由于电流采集周期大约是 2ms,所以数据反馈周期最好不要低于2ms */
if((uwTick % 50) == 0)
{
ADC_Resul = AverSum/AverCnt ; // 求两次平均值(降低误差)
/* 连续采样16次以后,以第17次作为偏差值 */
OffsetCnt_Flag++;
if(OffsetCnt_Flag >= 16)
{
if(OffsetCnt_Flag == 16)
{
OffSetHex = ADC_Resul;
}
OffsetCnt_Flag = 32;
ADC_Resul -= OffSetHex;//减去偏差值
}
/* 计算电压值和电流值 */
Volt_Result = ( (float)( (float)(ADC_Resul) * VOLT_RESOLUTION) );
ADC_CurrentValue = (float)( (Volt_Result / GAIN) / SAMPLING_RES);
/* 清空计数 */
AverCnt = 0;
AverSum = 0;
printf("Volt: %.1f mV -- Curr: %d mA\n",Volt_Result,(int32_t)
(ADC_CurrentValue+17)); // 电机未启动有驱动板有17mA
}
}
/**
* 函数功能: ADC转换完成回调函数
* 输入参数: hadc:ADC外设设备句柄
* 返 回 值: 无
* 说 明: 中断一次的时间是1.479ms,利用过采样和求均值方法,提高分辨率
*/
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc)
{
uint16_t ConvCnt = 0;
int32_t ADConv = 0 ;
/* ADC采集太快,需要先停止再处理数据 */
HAL_ADC_Stop_DMA(hadc);
/* 采集总线电压 */
SetChannelAsRank1(hadc,ADC_VOLT_CHANNEL);
HAL_ADC_Start(hadc);
// ADC设置先电流采集,并且ADC通道数设置为1。电压采集与电流采集要轮流切换采集
/* 取平均值 */
for(ConvCnt = 0; ConvCnt < (ADC_BUFFER ); ConvCnt++)
{
ADConv += ((int32_t)ADC_ConvValueHex[ConvCnt]);
}
/* 计算平均值,采样数据设置为2的整数倍,获得14bitsADC值*/
ADConv >>= ADC_Base;
/* 累加采样结果并记录采样次数*/
AverSum += ADConv;
AverCnt++;
HAL_ADC_Stop(hadc);
SetChannelAsRank1(hadc,ADC_CURRENT_CHANNEL);
HAL_ADC_Start_DMA(hadc,(uint32_t*)ADC_ConvValueHex,ADC_BUFFER);
}
/**
* 函数功能: ADC看门狗中断回调函数
* 输入参数: ADC句柄
* 返 回 值: 无
* 说 明: ADC窗口看门狗,检测到电压过低或者过高的时候就调用这个函数,停止输出.
*/
void HAL_ADC_LevelOutOfWindowCallback(ADC_HandleTypeDef* hadc)
{
/* 使能电机控制引脚 */
static uint8_t i = 0;
i++;
if(ADC_VoltBus > VOLT_LIMIT_MIN && ADC_VoltBus < VOLT_LIMIT_MAX)
i = 0 ;
else if(i>=6)
{
SHUTDOWN_MOTOR();
HAL_TIM_PWM_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
PWM_Duty = 0;
// ADC_VoltBus = (float)ADC_VoltBus * VOLTBUS_RESOLUTION;// ADC_VoltBus是在中断响应函数中读取的adc值
printf("Bus Voltage is out of range!!\n");
printf("Please Reset the Target!\n");
while(1); // PF8 的电压不在范围内就会触发看门狗 然后就一直死循环
}
}
void ADC_OVP_IRQHandler(void)
{
/* 读取总线电压值 */
ADC_VoltBus = HAL_ADC_GetValue(&hadcx); // PF8的电压采集
HAL_ADC_IRQHandler(&hadcx);
}其实PF8(电压采集在超出范围启动看门狗,然后在看门狗中断里采集电压。不超过不会采集。
2.过流保护
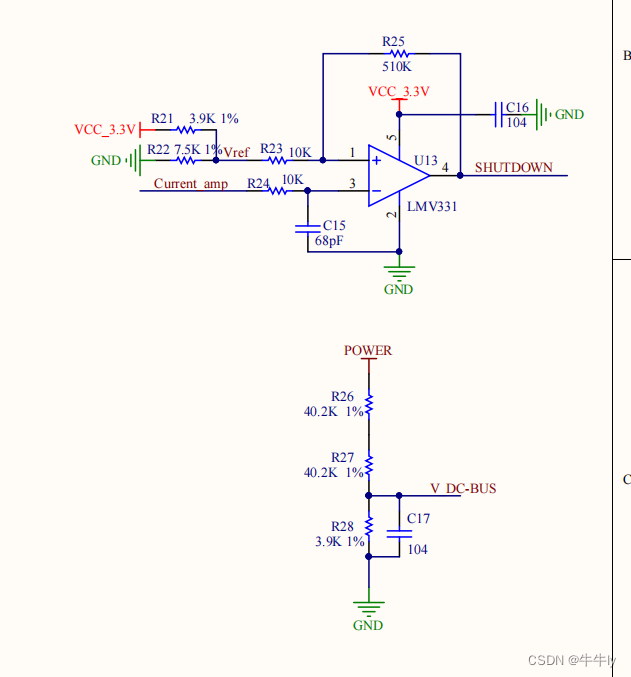
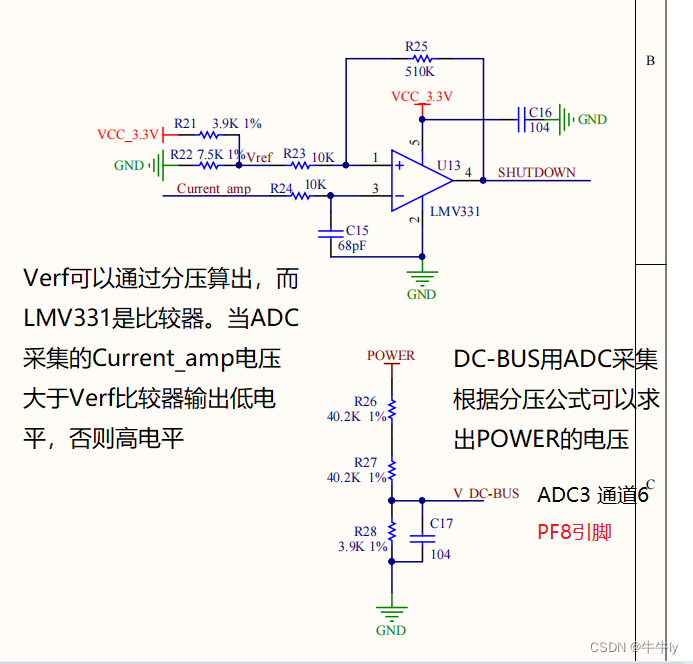
Current_amp点的电压是求采样电流的大小。先设置一个最大电流,如果采样电流超过这个最大电流就停止PWM输出从而电机也停止起到保护作用。采样电流是否在安全电流取决Current_amp点的电压,当Current_amp电压大于Verf电压比较器输出(接在SD引脚))低电平。
ADC代码,timer(产生互补PWM)跟上个列子一样直接看main.c
#include "stm32f4xx_hal.h"
#include "DCMotor/bsp_BDCMotor.h"
#include "key/bsp_key.h"
#include "encoder/bsp_encoder.h"
#include "usart/bsp_usartx.h"
#include "adc/bsp_adc.h"
#include "DCMotor/bsp_BDCMotor.h"
#include "stdlib.h"
/* 私有类型定义 --------------------------------------------------------------*/
/* 私有宏定义 ----------------------------------------------------------------*/
#define ADC_Base 8 // 取2的整数倍作为缓存区大小,得到14bits的ADC
#define ADC_BUFFER 1024 // 采样数据缓存区
#define CURRENT_MAX 400.0f // 最大电流值 400 mA
/* 私有变量 ------------------------------------------------------------------*/
// 用于保存转换计算后的数值
__IO float ADC_VoltValue;
__IO float ADC_VoltBus;
// AD转换结果值
__IO int16_t ADC_ConvValueHex[ADC_BUFFER]; // AD转换结果
__IO int32_t ADCSum = 0; // ADC结果累加值
__IO int32_t AverSum = 0; // 平均值的累加值
__IO int32_t AverCnt = 0; // 平均值的计数器
__IO uint32_t OffsetCnt_Flag = 0 ; // 偏差值的计数器标志
uint32_t Motor_Dir = 0 ; // 电机方向
extern __IO int32_t OffSetHex ; // 偏差值
extern __IO uint32_t uwTick;
static __IO uint32_t OverCurCount; // 过流次数记录
/* 扩展变量 ------------------------------------------------------------------*/
/* 私有函数原形 --------------------------------------------------------------*/
/* 函数体 --------------------------------------------------------------------*/
/**
* 函数功能: 系统时钟配置
* 输入参数: 无
* 返 回 值: 无
* 说 明: 无
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
__HAL_RCC_PWR_CLK_ENABLE(); // 使能PWR时钟
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); // 设置调压器输出电压级别1
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; // 外部晶振,8MHz
RCC_OscInitStruct.HSEState = RCC_HSE_ON; // 打开HSE
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; // 打开PLL
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; // PLL时钟源选择HSE
RCC_OscInitStruct.PLL.PLLM = 8; // 8分频MHz
RCC_OscInitStruct.PLL.PLLN = 336; // 336倍频
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; // 2分频,得到168MHz主时钟
RCC_OscInitStruct.PLL.PLLQ = 7; // USB/SDIO/随机数产生器等的主PLL分频系数
HAL_RCC_OscConfig(&RCC_OscInitStruct);
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; // 系统时钟:168MHz
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; // AHB时钟: 168MHz
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; // APB1时钟:42MHz
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; // APB2时钟:84MHz
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5);
HAL_RCC_EnableCSS(); // 使能CSS功能,优先使用外部晶振,内部时钟源为备用
// HAL_RCC_GetHCLKFreq()/1000 1ms中断一次
// HAL_RCC_GetHCLKFreq()/100000 10us中断一次
// HAL_RCC_GetHCLKFreq()/1000000 1us中断一次
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000); // 配置并启动系统滴答定时器
/* 系统滴答定时器时钟源 */
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* 系统滴答定时器中断优先级配置 */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
int main(void)
{
/* 复位所有外设,初始化Flash接口和系统滴答定时器 */
HAL_Init();
/* 配置系统时钟 */
SystemClock_Config();
/* 串口初始化 */
MX_USARTx_Init();
/* 按键初始化 */
KEY_GPIO_Init();
/* 高级控制定时器初始化并配置PWM输出功能 */
BDCMOTOR_TIMx_Init();
/* 启动定时器 */
HAL_TIM_Base_Start(&htimx_BDCMOTOR);
/* 启动定时器通道和互补通道PWM输出 */
PWM_Duty = 100;
__HAL_TIM_SET_COMPARE(&htimx_BDCMOTOR,TIM_CHANNEL_1,PWM_Duty); // 0%
/* ADC-DMA 初始化 */
HAL_Delay(100);
MX_ADCx_Init();
MX_DMA_Init();
/* 启动AD转换并使能DMA传输和中断 */
HAL_ADC_Start_DMA(&hadcx,(uint32_t*)ADC_ConvValueHex,ADC_BUFFER);
__HAL_DMA_DISABLE_IT(&hdma_adcx,DMA_IT_HT);
__HAL_DMA_DISABLE_IT(&hdma_adcx,DMA_IT_TE);
__HAL_DMA_DISABLE_IT(&hdma_adcx,DMA_IT_FE);
__HAL_DMA_DISABLE_IT(&hdma_adcx,DMA_IT_DME);
/* 无限循环 */
while (1)
{
/* 启动按钮 */
if(KEY1_StateRead()==KEY_DOWN)
{
HAL_TIM_PWM_Start(&htimx_BDCMOTOR,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
__HAL_TIM_SET_COMPARE(&htimx_BDCMOTOR,TIM_CHANNEL_1,0); // 0%
}
if(KEY2_StateRead()==KEY_DOWN)
{
HAL_TIM_PWM_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
__HAL_TIM_SET_COMPARE(&htimx_BDCMOTOR,TIM_CHANNEL_1,0); // 0%
}
if(KEY3_StateRead()==KEY_DOWN)//加速
{
PWM_Duty += 200;
if(PWM_Duty >=BDCMOTOR_DUTY_FULL)
PWM_Duty = BDCMOTOR_DUTY_FULL;
__HAL_TIM_SET_COMPARE(&htimx_BDCMOTOR,TIM_CHANNEL_1,PWM_Duty);
}
if(KEY4_StateRead()==KEY_DOWN)//减速
{
PWM_Duty -= 200;
if(PWM_Duty <=0)
PWM_Duty = 0;
__HAL_TIM_SET_COMPARE(&htimx_BDCMOTOR,TIM_CHANNEL_1,PWM_Duty);
}
if(KEY5_StateRead()==KEY_DOWN) // 换方向
{
if(Motor_Dir)
{
Motor_Dir = 0;
HAL_TIM_PWM_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htimx_BDCMOTOR,TIM_CHANNEL_1);
}
else
{
Motor_Dir = 1;
HAL_TIM_PWM_Start(&htimx_BDCMOTOR,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
}
}
}
}
void HAL_SYSTICK_Callback(void)
{
__IO int32_t ADC_Resul= 0;
__IO float Volt_Result = 0;
__IO float ADC_CurrentValue;
/* 数据反馈周期是50ms,由于电流采集周期大约是 2ms,所以数据反馈周期最好不要低于2ms */
if((uwTick % 50) == 0)
{
ADC_Resul = AverSum/AverCnt ;
/* 连续采样16次以后,以第17次作为偏差值 */
OffsetCnt_Flag++;
if(OffsetCnt_Flag >= 16)
{
if(OffsetCnt_Flag == 16)
{
OffSetHex = ADC_Resul;
}
OffsetCnt_Flag = 32;
ADC_Resul -= OffSetHex;//减去偏差值
}
/* 计算电压值和电流值 */
Volt_Result = ( (float)( (float)(ADC_Resul) * VOLT_RESOLUTION) );
ADC_CurrentValue = (float)( (Volt_Result / GAIN) / SAMPLING_RES);
printf("Volt: %.2f -- Cur: %.2f mA\n",Volt_Result,ADC_CurrentValue);
/* 清空计数 */
AverCnt = 0;
AverSum = 0;
/* 过流保护 */
if(OffsetCnt_Flag >= 32 )
{
if(ADC_CurrentValue >= CURRENT_MAX ) // 检测到五次如果超过最大电流就关掉PWM输出
{
OverCurCount++;
if(OverCurCount >= 5)
{
printf("Over Current %.2f \n",ADC_CurrentValue);
printf("Please reset the target!!\n");
SHUTDOWN_MOTOR();
HAL_TIM_PWM_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
OverCurCount = 0;
while(1);
}
}
else
OverCurCount = 0;
}
}
}
/**
* 函数功能: ADC转换完成回调函数
* 输入参数: hadc:ADC外设设备句柄
* 返 回 值: 无
* 说 明: 中断一次的时间是1.479ms,利用过采样和求均值方法,提高分辨率
*/
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc)
{
uint16_t ConvCnt = 0;
int32_t ADConv = 0 ;
/* ADC采集太快,需要先停止再处理数据 */
HAL_ADC_Stop_DMA(hadc);
/* 采集总线电压 */
SetChannelAsRank1(hadc,ADC_VOLT_CHANNEL);
HAL_ADC_Start(hadc);
/* 取平均 */
for(ConvCnt =0; ConvCnt < ADC_BUFFER ; ConvCnt++)
{
ADConv += ((int32_t)ADC_ConvValueHex[ConvCnt]);
}
/* 计算平均值,采样数据设置为2的整数倍,获得14bitsADC值*/
ADConv >>= ADC_Base;
/* 累加采样结果并记录采样次数*/
AverSum += ADConv;
AverCnt ++;
HAL_ADC_Stop(hadc);
SetChannelAsRank1(hadc,ADC_CURRENT_CHANNEL);
HAL_ADC_Start_DMA(hadc,(uint32_t*)ADC_ConvValueHex,ADC_BUFFER);
}
/**
* 函数功能: ADC看门狗中断回调函数
* 输入参数: ADC句柄
* 返 回 值: 无
* 说 明: ADC窗口看门狗,检测到电压过低或者过高的时候就调用这个函数,停止输出.
*/
void HAL_ADC_LevelOutOfWindowCallback(ADC_HandleTypeDef* hadc)
{
/* 使能电机控制引脚 */
static uint8_t i = 0;
i++;
if(ADC_VoltBus > VOLT_LIMIT_MIN && ADC_VoltBus < VOLT_LIMIT_MAX)
i = 0 ;
else if(i>=6)
{
SHUTDOWN_MOTOR();
HAL_TIM_PWM_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Stop(&htimx_BDCMOTOR,TIM_CHANNEL_1);
PWM_Duty = 0;
// ADC_VoltBus = (float)ADC_VoltBus * VOLTBUS_RESOLUTION;// ADC_VoltBus是在中断响应函数中读取的adc值
printf("Bus Voltage is out of range!!\n");
printf("Please Reset the Target!\n");
while(1);
}
}
void ADC_OVP_IRQHandler(void)
{
/* 读取总线电压值 */
ADC_VoltBus = HAL_ADC_GetValue(&hadcx);
HAL_ADC_IRQHandler(&hadcx);
}
跟上个列子差不多只是加了限流保护。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









