







1. 原理分析
DC-DC BUCK起一个降压的作用,相比LDO而言DC-DC BUCK转换效率更高。
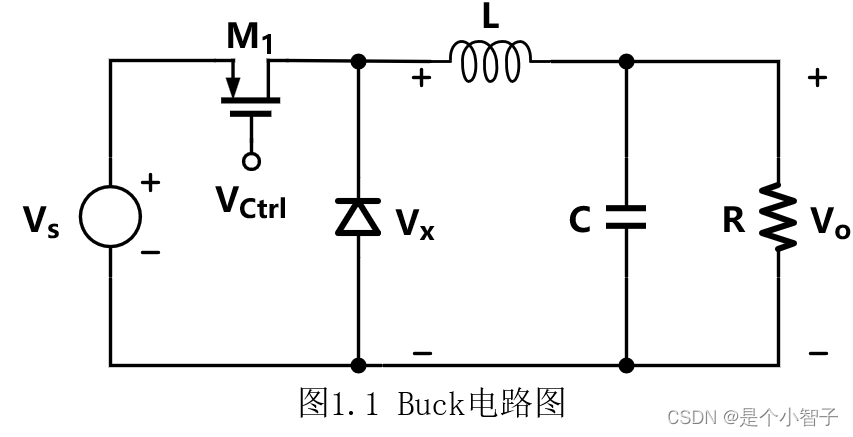
晶体管M1在电路中作为一个开关由VCtrl来控制通断。一开始开关不导通,电路的电流为零。当开关初次导通时,二极管反偏断开,电路电流会增加,电感两端也会因为电流的增加而产生电压,抵抗电流的增加。此电压会抵消部分电源端的电压,因此负载端的电压会较电源端要低。随着时间增加,电流的变化率变小,因此电感端电压变小,使负载端的电压慢慢上升,此时电感中会以磁场方式储存能量。若再使开关断开,因此电流会下降。由于电流下降,电感两端也会产生电压,抵消电流的下降,此时电感可视为一电压源。而在进行放能时,电感的正负极会发生变化,二极管导通。电感利用磁场中储存的能量使电流流到负载端。此时是由电感提供电能给电路中的其他元件。若在电感器的电放完之前,开关又再度导通,负载端的电压就会恒大于零。实际上可以将该电路看作一个矩形波发生器和一个低通滤波器。矩形波经过滤波器后就只剩下直流分量,这样就达到了降压的效果。然而不存在完全理想的滤波器,因此输出的电压带有一定的纹波。
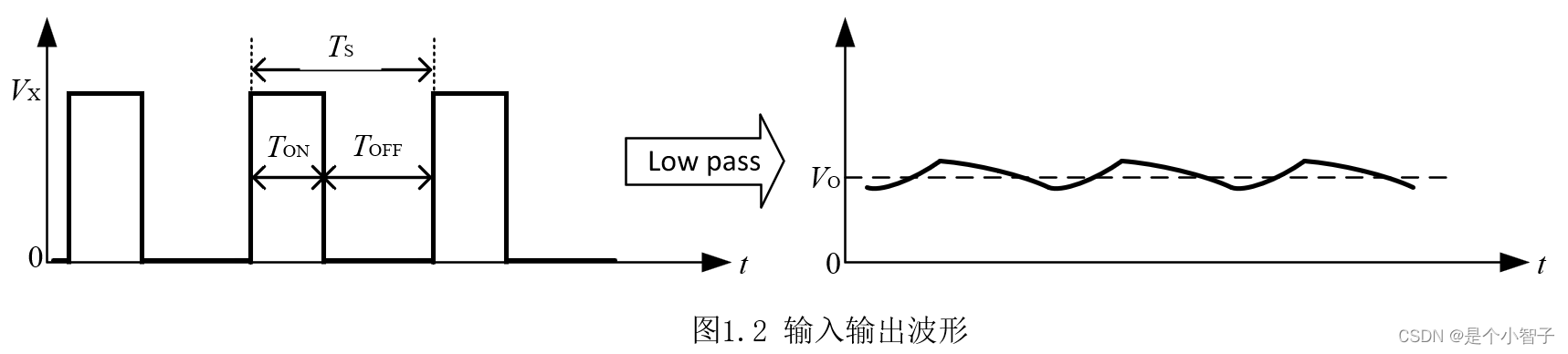
矩形波的傅里叶表达式(Ts是方波周期,D是矩形波的占空比):
V
X
(
t
)
=
c
0
+
∑
n
=
1
+
∞
c
n
s
i
n
(
n
ω
s
t
+
θ
n
)
,
ω
s
=
2
π
T
s
c
0
=
1
T
∫
0
T
V
X
(
t
)
d
t
=
T
o
n
T
S
V
S
=
D
V
S
c
n
=
2
V
S
n
π
1
−
c
o
s
2
n
π
T
o
n
T
S
\begin{aligned} V_{X}(t) =c_0+&\sum_{n=1}^{+∞} c_nsin(nω_st+θ_n) ,ω_s=\frac{2\pi}{T_s} \\[2.5ex] c_0 =&\frac{1}{T} \int_{0}^{T} V_{X}(t) \,dt =\frac{T_{on}}{T_S}V_S=DV_S \\[2.5ex] c_n =&\frac{\sqrt2 V_S}{n\pi} \sqrt{1-cos2n\pi\frac{T_{on}}{T_S}} \end{aligned}
VX(t)=c0+c0=cn=n=1∑+∞cnsin(nωst+θn),ωs=Ts2πT1∫0TVX(t)dt=TSTonVS=DVSnπ2VS1−cos2nπTSTon 如果是一个理想滤波器,只需要截止频率ωc<ωs就可以得到理想的直流信号。
很明显图1.1电路滤波器是非理想的,从VX到VO的传递函数:
F
s
=
(
1
/
C
s
)
∥
R
L
s
+
(
1
/
C
s
)
∥
R
=
1
L
C
s
2
+
(
L
/
R
)
s
+
1
\begin{aligned} F_{s} &=\frac{(1/Cs)∥R}{Ls+(1/Cs)∥R} \\[2.5ex] &=\frac{1}{LCs^2+(L/R)s+1} \end{aligned}
Fs=Ls+(1/Cs)∥R(1/Cs)∥R=LCs2+(L/R)s+11 计算得到极点:
s
1
,
,
2
=
−
1
2
R
C
±
(
1
2
R
C
)
2
−
1
L
C
=
−
α
±
α
2
−
ω
0
2
=
−
ζ
±
ζ
2
−
1
,
(
ζ
=
α
ω
0
=
1
2
R
L
C
)
\begin{aligned} s_{1,,2}&=- \frac{1}{2RC}±\sqrt{(\frac{1}{2RC})^2-\frac{1}{LC}} \\[2.5ex] &=-α±\sqrt{α^2-ω_0^2} \\[2.5ex] &=-ζ±\sqrt{ζ^2-1},\ \ (ζ=\frac{α}{ω_0}=\frac{1}{2R}\sqrt\frac{L}{C}) \end{aligned}
s1,,2=−2RC1±(2RC1)2−LC1=−α±α2−ω02=−ζ±ζ2−1, (ζ=ω0α=2R1CL)
其中α是衰减量,ω0是谐振频率。阻尼系数ζ=α/ω0,对于ζ存在下面三种情况:
► 0<ζ<1,两个极点为复数,电路有振荡,振荡幅度随时间衰减;
► ζ>1,两个极点为实数,电路无振荡,衰减较慢;
► ζ=1,有重极点,电路无振荡,衰减最快;



矩形波函数VX(t)通过滤波器后得到输出函数VO(t),其中前一项k0是输出的直流分量,这是我们想要的;后一项是输出的纹波,这是不想要的,要尽量减小纹波。
V O ( t ) = k 0 + ∑ n = 1 + ∞ k n s i n ( n ω s t + θ n ) k 0 = c 0 k n = c n 1 0 − 40 l o g n ω s ω 0 20 \begin{aligned} V_{O}(t) =&k_0+\sum_{n=1}^{+∞} k_nsin(nω_st+θ_n) \\[2.5ex] k_0&=c_0 \\[2.5ex] k_n&=c_n10^{\frac{-40log\frac{nω_s}{ω_0}}{20}} \end{aligned} VO(t)=k0knk0+n=1∑+∞knsin(nωst+θn)=c0=cn1020−40logω0nωs
2. 工作模式
2.1.连续模式(CCM)
如果电路在工作期间,其电感电流IL恒大于零则工作在连续模式。
2.1.1. 电感电压电流分析

► 图1.1开关导通,电感两侧的电压为VS-VO,流过电感的电流会线性增加,理想二极管反偏不会有电流。
V
L
=
L
d
I
L
d
t
Δ
I
L
o
n
=
∫
0
T
o
n
V
L
L
d
t
=
V
S
−
V
O
L
T
o
n
\begin{aligned} V_L&=L \frac{dI_L}{dt} \\[3ex] ΔI_{Lon}=\int_{0}^{T_{on}} &\frac{V_L}{L}\,dt=\frac{V_S-V_O}{L}T_{on} \end{aligned}
VLΔILon=∫0Ton=LdtdILLVLdt=LVS−VOTon ► 图1.1开关断开,二极管被正向导通,电感两侧的电压为-VO,而电感电流会线性下降。
Δ
I
L
o
f
f
=
∫
T
o
n
T
s
V
L
L
d
t
=
−
V
O
L
T
o
f
f
\begin{aligned} ΔI_{Loff}=\int_{T_{on}}^{T_s} \frac{V_L}{L}\,dt=-\frac{V_O}{L}T_{off} \end{aligned}
ΔILoff=∫TonTsLVLdt=−LVOToff 当电路工作在稳态下,也就是在周期开始和周期结束时,电感的能量相等:
Δ
I
L
o
n
+
Δ
I
L
o
f
f
=
0
V
S
−
V
O
L
T
o
n
−
V
O
L
T
o
f
f
=
0
(
V
S
−
V
O
)
D
T
s
−
V
O
(
1
−
D
)
T
s
=
0
V
O
=
V
S
D
\begin{aligned} ΔI_{Lon}&+ΔI_{Loff}=0 \\[2.5ex] \frac{V_S-V_O}{L}&T_{on}-\frac{V_O}{L}T_{off}=0 \\[2.8ex] (V_S-V_O)D&T_s-V_O(1-D)T_s=0 \\[2.5ex] &V_O=V_SD \end{aligned}
ΔILonLVS−VO(VS−VO)D+ΔILoff=0Ton−LVOToff=0Ts−VO(1−D)Ts=0VO=VSD 根据上面式子,可以看出在固定输入电压下,输出电压和占空比之间有线性的关系。
既然输出电压大小与负载没有任何关系,那么占空比不变,加在电阻上的电压就是定值。如果电阻小则电流大,电阻上消耗的功率就大(重载);电阻小则电流小,电阻上消耗的功率就小(轻载)。
(VS-VO)DTs-VO(1-D)Ts=0 被称为伏秒平衡条件。
2.1.1. 电容电压电流分析
上面图2.1电感电流是交流和直流的叠加。电容的阻抗为
1
ω
C
\frac{1}{ωC}
ωC1,只要开关频率ω足够快,电容阻抗就会足够小,交流分量可以看作是全部流入电容,而电阻上只流过直流分量。

因为电容和电感的流过的是同一个交流分量,因此ΔIL=ΔIC,而电阻上的直流电流IR
=
V
O
R
=\frac{V_O}{R}
=RVO。对电容电流积分得到电容的电压:
V
C
=
1
C
∫
I
C
d
t
\begin{aligned} V_{C}=\frac{1}{C}\int{I_C}\,dt \end{aligned}
VC=C1∫ICdt 电感电流的最大值和最小值:
I
L
m
a
x
=
I
R
+
1
2
Δ
I
L
=
V
O
R
+
1
2
V
S
−
V
O
L
T
o
n
I
L
m
i
n
=
I
R
−
1
2
Δ
I
L
=
V
O
R
−
1
2
V
S
−
V
O
L
T
o
n
\begin{aligned} I_{Lmax}=I_R+\frac{1}{2}ΔI_L=\frac{V_O}{R}+\frac{1}{2}\frac{V_S-V_O}{L}T_{on} \\[3ex] I_{Lmin}=I_R-\frac{1}{2}ΔI_L=\frac{V_O}{R}-\frac{1}{2}\frac{V_S-V_O}{L}T_{on} \end{aligned}
ILmax=IR+21ΔIL=RVO+21LVS−VOTonILmin=IR−21ΔIL=RVO−21LVS−VOTon
2.2.非连续模式(DCM)
非连续模式和连续模式之间的差异就是开关断开后电感会放电直到电流为零。非连续模式下的二极管D的电压电流变化如图2.3。当开关关断Toff时间之内,二极管D导通电感释放能量;开关关断Toff时间之后,电感上的电流下降到零,二极管D反偏断开,这时VD=VO。

仍考虑稳态下的情形,也就是在周期开始和周期结束时,电感的能量相等(在此条件下,会是零)。电感的能量相等可以推得电感电压VL的平均值为零,也就是灰色区域和紫色区域的面积相等,因此可得:
(
V
S
−
V
O
)
D
T
s
−
V
O
δ
T
s
=
0
δ
=
T
o
f
f
1
T
s
\begin{aligned} (V_S-V_O)&DT_s-V_OδT_s=0 \\[2.5ex] δ&=\frac{T_{off1}}{T_s} \end{aligned}
(VS−VO)δDTs−VOδTs=0=TsToff1
电感电流IL由输出电流IO和理想情况下流入电容的纹波电流IC组成。负载的电流 IO近似为定值,因此假设其输出电容够大,在切换周期中其输出电压均为定值,可以得到流过电容器的电流平均值为0,电感平均电流等于输出电流:
I
L
‾
=
I
O
\overline{I_L}=I_O
IL=IO 上述分析得知电感电流为锯齿形,求其平均值为:
I
L
‾
=
1
T
s
∫
0
D
T
s
+
δ
T
s
I
L
(
t
)
d
t
=
I
L
m
a
x
(
D
+
δ
)
2
I
L
m
a
x
=
∫
0
T
o
n
V
L
L
d
t
=
V
S
−
V
O
L
T
o
n
=
V
S
−
V
O
L
D
T
s
\begin{aligned} \overline{I_L}=&\frac{1}{T_s}\int_0^{DT_s+δT_s} I_L(t) \,dt \\[2.5ex] =&\frac{I_{Lmax}(D+δ)}{2} \\[2.5ex] I_{Lmax}=\int_{0}^{T_{on}} \frac{V_L}{L}\,&dt=\frac{V_S-V_O}{L}T_{on}=\frac{V_S-V_O}{L}DT_s \end{aligned}
IL==ILmax=∫0TonLVLTs1∫0DTs+δTsIL(t)dt2ILmax(D+δ)dt=LVS−VOTon=LVS−VODTs 最后联立整理上面式子得到输出电压的公式:
V
O
=
V
S
1
1
+
2
L
I
o
D
2
V
s
T
s
\begin{aligned} V_O=V_S \frac{1}{1+ \frac{2LI_o}{D^2V_sT_s}} \end{aligned}
VO=VS1+D2VsTs2LIo1 在连续模式下,输出电压等于占空比乘以输入电压。但在不连续模式下,输出电压的公式复杂多了,除了和输入电压Vs和占空比D有关外,也和电感值L、切换周期Ts和输出电流IO有关。
2.3.CCM和DCM边界
在连续模式中电感电流的最小值为:
I
L
m
i
n
=
I
R
−
1
2
Δ
I
L
=
V
O
R
−
1
2
V
S
−
V
O
L
T
o
n
\begin{aligned} I_{Lmin}=I_R-\frac{1}{2}ΔI_L=\frac{V_O}{R}-\frac{1}{2}\frac{V_S-V_O}{L}T_{on} \end{aligned}
ILmin=IR−21ΔIL=RVO−21LVS−VOTon 如果电阻R足够的大,ILmin就会等于0,求出此时的电阻为:
R
=
2
L
(
1
−
D
)
T
s
\begin{aligned} R=\frac{2L}{(1-D)T_s} \end{aligned}
R=(1−D)Ts2L 如果电阻继续增大就会从连续模式进入非连续模式。
3. 电压模控制模式
3.1.电压模控制的系统结构(补偿前)
图1.1晶体管M1在电路中作为一个开关由VCtrl来控制通断,但是VCtrl怎么产生呢?当输出产生波动后VCtrl怎么进行调整使得输出稳定?这时候就必须用到反馈网络。图3.1是一个电压模控制的反馈系统。Resr是电容的寄生电阻,Rf1、Rf2是反馈电阻,Vref是参考电压,比较器通过锯齿波与误差放大器的输出Ve进行比较产生矩形波。当Vout小于Vref,误差放大器输出Ve增大,比较器输出占空比减小,PMOS管M1导通时间变长,Vout上升。

画系统框图前先要考虑系统的输入输出是哪个信号,从图3.1看输入是Vin,输出是Vout,不是很明显吗?前面电路工作分析当中已经知道Vout的大小与开关的通断时间有关(Vout=D·Vin),输出看似与Vin有关,但是如果将Vin增大为原来的2倍,输出将如何变化?这时反馈环路会发现Vout偏离了Vref,然后调整占空比使Vout回到Vref。也就是说控制Vout的是Vref而不是Vin。于是得到真正的系统输入为Vref。

3.2.环路稳定性
3.2.1. 如何判断环路稳定性
因为引入了反馈回路,所以必须保证环路稳定。如何判断系统稳定呢?

图3.3是一个基本的反馈系统,系统闭环的传输函数表示为:
Y
(
s
)
X
(
s
)
=
G
(
s
)
1
+
G
(
s
)
F
(
s
)
=
G
(
s
)
1
+
T
(
s
)
\begin{aligned} \frac{Y(s)}{X(s)}=\frac{G(s)}{1+G(s)F(s)}=\frac{G(s)}{1+T(s)} \end{aligned}
X(s)Y(s)=1+G(s)F(s)G(s)=1+T(s)G(s) 其中T(s)是系统开环时的传输函数,如图3.4将闭环系统断开,输入信号接地,加入测试电压源,可以得到系统的开环传输函数T(s):

选择在哪个点开路都可以得到下面结果:
T
(
s
)
=
V
F
V
t
e
s
t
=
G
(
s
)
F
(
s
)
\begin{aligned} T(s)=\frac{V_F}{V_{test}}=G(s)F(s) \end{aligned}
T(s)=VtestVF=G(s)F(s) 当T(s)满足下面条件时系统是稳定的:
{
∣
T
(
s
)
∣
=
1
(即
0
d
B
)时,相位
∣
φ
∣
<
180
°
;
或
∣
φ
∣
=
180
°
时,
∣
T
(
s
)
∣
<
1
\left\{ \begin{aligned} &|T(s)|=1(即0dB)时 , 相位|φ|<180° ;\\[2.5ex] &或|φ|=180°时,|T(s)|<1 \end{aligned} \right.
⎩
⎨
⎧∣T(s)∣=1(即0dB)时,相位∣φ∣<180°;或∣φ∣=180°时,∣T(s)∣<1
3.2.2. 电压模控制模式环路的稳定性
按照上面的思路,从比较器和误差放大器之间开路来计算开环传输函数。比较器的输入加入测试电压源Vtest,环路输出为VF。

分析环路增益时选择在比较器的输入端进行开环,因此先考虑比较器的传输函数。比较器输入为电压信号Vtest,输出为占空比D。

图3.6为比较器的输入输出图像,M1为PMOS管,因此低电平时间为导通时间Ton,D=
T
o
n
T
s
\frac{T_{on}}{T_s}
TsTon。于是可以得到比较器传输函数:
G
P
W
M
(
s
)
=
D
V
t
e
s
t
=
T
o
n
T
s
⋅
1
V
t
e
s
t
=
V
t
e
s
t
V
r
a
m
p
⋅
1
V
t
e
s
t
=
1
V
r
a
m
p
\begin{aligned} G_{PWM}(s)=\frac{D}{V_{test}}=\frac{T_{on}}{T_s}·\frac{1}{V_{test}}=\frac{V_{test}}{V_{ramp}}·\frac{1}{V_{test}}=\frac{1}{V_{ramp}} \end{aligned}
GPWM(s)=VtestD=TsTon⋅Vtest1=VrampVtest⋅Vtest1=Vramp1 Buffer为一个逻辑模块,传输函数为1。
开关管M1输入为占空比D,输出为VSW,所以M1的传输函数为:
G
S
W
(
s
)
=
V
S
W
D
=
1
D
⋅
D
⋅
V
i
n
=
V
i
n
\begin{aligned} G_{SW}(s)=\frac{V_{SW}}{D}=\frac{1}{D}·D·V_{in}=V_{in} \end{aligned}
GSW(s)=DVSW=D1⋅D⋅Vin=Vin RLC滤波网络的传输函数:
G
R
L
C
(
s
)
=
V
o
u
t
V
S
W
=
1
+
s
C
R
e
s
r
L
C
(
1
+
R
e
s
r
/
R
)
s
2
+
(
C
R
e
s
r
+
L
/
R
)
s
+
1
≈
1
+
s
C
R
e
s
r
L
C
s
2
+
(
L
/
R
)
s
+
1
\begin{aligned} G_{RLC}(s)=\frac{V_{out}}{V_{SW}}=\frac{1+sCR_{esr}}{LC(1+R_{esr}/R)s^2+(CR_{esr}+L/R)s+1}≈\frac{1+sCR_{esr}}{LCs^2+(L/R)s+1} \end{aligned}
GRLC(s)=VSWVout=LC(1+Resr/R)s2+(CResr+L/R)s+11+sCResr≈LCs2+(L/R)s+11+sCResr 反馈网络传输函数:
F
(
s
)
=
R
f
2
R
f
1
+
R
f
2
\begin{aligned} F(s)=\frac{R_{f2}}{R_{f1}+R_{f2}} \end{aligned}
F(s)=Rf1+Rf2Rf2 误差放大器的传输函数:
G
E
A
(
s
)
\begin{aligned} G_{EA}(s) \end{aligned}
GEA(s) 最后可以得到开环的传输函数:
T
(
s
)
=
V
F
V
t
e
s
t
=
G
P
W
M
(
s
)
⋅
G
S
W
(
s
)
⋅
G
R
L
C
(
s
)
⋅
F
(
s
)
⋅
G
E
A
(
s
)
=
G
E
A
(
s
)
⋅
R
f
2
V
i
n
(
R
f
1
+
R
f
2
)
V
r
a
m
p
⋅
1
+
s
C
R
e
s
r
L
C
s
2
+
(
L
/
R
)
s
+
1
\begin{aligned} T(s)=\frac{V_{F}}{V_{test}}&=G_{PWM}(s)·G_{SW}(s)·G_{RLC}(s)·F(s)·G_{EA}(s) \\[2.5ex] &=G_{EA}(s)·\frac{R_{f2}V_{in}}{(R_{f1}+R_{f2})V_{ramp}}·\frac{1+sCR_{esr}}{LCs^2+(L/R)s+1} \end{aligned}
T(s)=VtestVF=GPWM(s)⋅GSW(s)⋅GRLC(s)⋅F(s)⋅GEA(s)=GEA(s)⋅(Rf1+Rf2)VrampRf2Vin⋅LCs2+(L/R)s+11+sCResr 通过传输函数T(s)可以发现系统的极点分别由RLC滤波网络GRLC(s)和误差放大器GEA(s)提供。GRLC(s)有两个共轭极点s1,2,GEA(s)产生的极点为s3。RLC滤波网络的L和C都非常大,共轭极点s1,2比较小,且相位以每10倍频90dB下降。如果s3和s1,2接近,相位变化更快,系统是不稳定的。
3.3.环路补偿
3.3.1. 环路补偿方式
通过上面的分析得到了一个结论,图3.1的结构是不稳定的,要想让其变得稳定,需要加入补偿电路抵消RLC网络产生的共轭极点。根据误差放大器类型可以分为两种补偿方式,传统运算放大器补偿和跨导运算放大器补偿。
传统误差放大器是一个电压放大器件,这种放大器稳定工作需要有局部反馈。

利用运放的虚短:
i
1
=
V
X
Z
1
(
s
)
,
i
2
=
−
V
Y
Z
2
(
s
)
\begin{aligned} i_1=\frac{V_X}{Z_1(s)},i_2=-\frac{V_Y}{Z_2(s)} \end{aligned}
i1=Z1(s)VX,i2=−Z2(s)VY 利用运放的虚断:
i
1
=
i
2
\begin{aligned} i_1=i_2 \end{aligned}
i1=i2 整理得到补偿网络的传输函数:
H
(
s
)
=
V
Y
V
X
=
−
Z
1
(
s
)
Z
2
(
s
)
\begin{aligned} H(s)=\frac{V_Y}{V_X}=-\frac{Z_1(s)}{Z_2(s)} \end{aligned}
H(s)=VXVY=−Z2(s)Z1(s) Z1(s)、Z2(s)由电容电阻组成,可以根据补偿需要调整零极点的位置。其中Rf2只影响运放的直流偏置,在交流分析中可以忽略它。
跨导放大器是一个电流放大器件,它是一个开环放大器,没有局部反馈。

A点的电压为
V
A
=
V
X
⋅
R
f
2
R
f
2
+
Z
I
N
(
s
)
\begin{aligned} V_A=V_X·\frac{R_{f2}}{R_{f2}+Z_{IN}(s)} \end{aligned}
VA=VX⋅Rf2+ZIN(s)Rf2 运放的跨导
g
m
=
输出电流
输入电压
=
V
Y
/
Z
O
(
s
)
V
A
\begin{aligned} g_m=\frac{输出电流}{输入电压}=\frac{V_Y/Z_O(s)}{V_A} \end{aligned}
gm=输入电压输出电流=VAVY/ZO(s) 整理得到补偿网络的传输函数
H
(
s
)
=
V
Y
V
X
=
R
f
2
R
f
2
+
Z
I
N
(
s
)
⋅
g
m
⋅
Z
O
(
s
)
\begin{aligned} H(s)=\frac{V_Y}{V_X}=\frac{R_{f2}}{R_{f2}+Z_{IN}(s)}·g_m·Z_O(s) \end{aligned}
H(s)=VXVY=Rf2+ZIN(s)Rf2⋅gm⋅ZO(s)
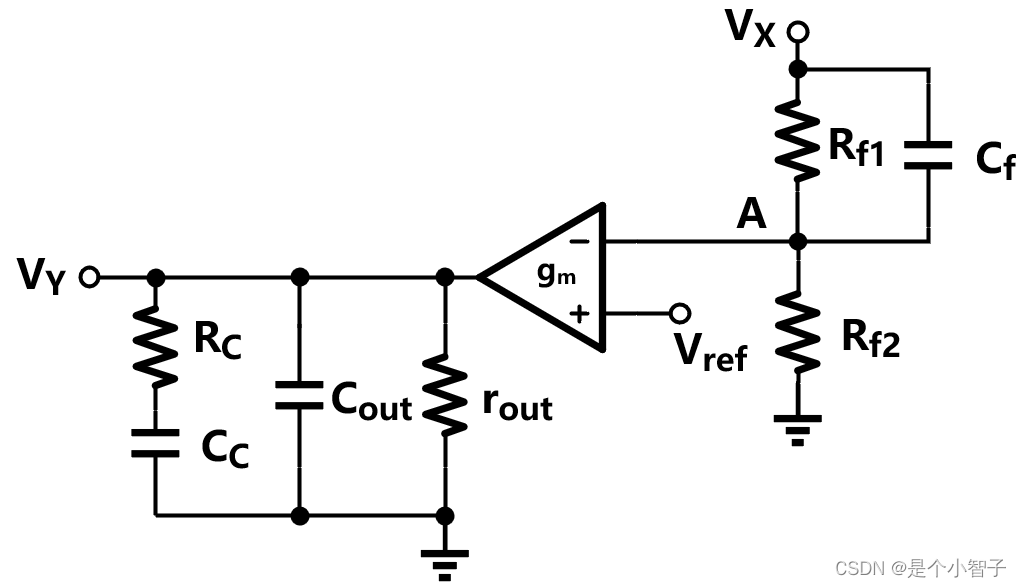
3.3.2. 用跨导放大器补偿
图3.9中rout和Cout分别是误差放大器的输出电阻和输出电容,RC和CC是在输出端引入的补偿,Cf是在反馈端引入的补偿电容。
反馈的传输函数变为
F
(
s
)
=
V
A
V
X
=
R
f
2
(
s
R
f
1
C
f
+
1
)
s
R
f
1
R
f
2
C
f
+
R
f
1
+
R
f
2
\begin{aligned} F(s)=\frac{V_A}{V_X}=\frac{R_{f2}(sR_{f1}C_f+1)} {sR_{f1}R_{f2}C_f+R_{f1}+R_{f2}} \end{aligned}
F(s)=VXVA=sRf1Rf2Cf+Rf1+Rf2Rf2(sRf1Cf+1) 误差放大器和补偿的传输函数变为
G
E
A
(
s
)
=
V
Y
V
A
=
g
m
r
o
u
t
s
R
C
C
C
+
1
s
2
r
o
u
t
C
o
u
t
R
C
C
C
+
s
(
r
o
u
t
C
C
+
R
C
C
C
+
r
o
u
t
C
o
u
t
)
+
1
\begin{aligned} G_{EA}(s)=\frac{V_Y}{V_A}=g_mr_{out}\frac{sR_CC_C+1} {s^2r_{out}C_{out}R_CC_C+s(r_{out}C_C+R_CC_C+r_{out}C_{out})+1} \end{aligned}
GEA(s)=VAVY=gmrouts2routCoutRCCC+s(routCC+RCCC+routCout)+1sRCCC+1
C
o
u
t
≪
C
C
,
R
C
≪
r
o
u
t
\begin{aligned} C_{out}≪C_C,R_C≪r_{out} \end{aligned}
Cout≪CC,RC≪rout
G
E
A
(
s
)
≈
g
m
r
o
u
t
s
R
C
C
C
+
1
s
2
r
o
u
t
C
o
u
t
R
C
C
C
+
s
r
o
u
t
C
C
+
1
≈
g
m
r
o
u
t
s
R
C
C
C
+
1
s
2
r
o
u
t
C
o
u
t
R
C
C
C
+
s
(
r
o
u
t
C
C
+
R
C
C
o
u
t
)
+
1
=
g
m
r
o
u
t
s
R
C
C
C
+
1
(
s
R
C
C
o
u
t
+
1
)
(
s
r
o
u
t
C
C
+
1
)
\begin{aligned} G_{EA}(s)&≈g_mr_{out}\frac{sR_CC_C+1} {s^2r_{out}C_{out}R_CC_C+sr_{out}C_C+1} \\[2.5ex] &≈g_mr_{out}\frac{sR_CC_C+1} {s^2r_{out}C_{out}R_CC_C+s(r_{out}C_C+R_CC_{out})+1} \\[2.5ex] &=g_mr_{out}\frac{sR_CC_C+1} {(sR_CC_{out}+1)(sr_{out}C_C+1)} \end{aligned}
GEA(s)≈gmrouts2routCoutRCCC+sroutCC+1sRCCC+1≈gmrouts2routCoutRCCC+s(routCC+RCCout)+1sRCCC+1=gmrout(sRCCout+1)(sroutCC+1)sRCCC+1
3.4.电压模控制的系统结构(补偿后)
补偿之后的电路结构变为

3.4.1. 补偿后稳定性分析
补偿之后的开环传输函数为
T
(
s
)
=
V
F
V
t
e
s
t
=
G
P
W
M
(
s
)
⋅
G
S
W
(
s
)
⋅
G
R
L
C
(
s
)
⋅
F
(
s
)
⋅
G
E
A
(
s
)
\begin{aligned} T(s)=\frac{V_{F}}{V_{test}}&=G_{PWM}(s)·G_{SW}(s)·G_{RLC}(s)·F(s)·G_{EA}(s) \end{aligned}
T(s)=VtestVF=GPWM(s)⋅GSW(s)⋅GRLC(s)⋅F(s)⋅GEA(s)
T
(
s
)
=
g
m
r
o
u
t
s
R
C
C
C
+
1
(
s
R
C
C
o
u
t
+
1
)
(
s
r
o
u
t
C
C
+
1
)
⋅
R
f
2
(
s
R
f
1
C
f
+
1
)
s
R
f
1
R
f
2
C
f
+
R
f
1
+
R
f
2
⋅
V
i
n
V
r
a
m
p
⋅
1
+
s
C
R
e
s
r
L
C
s
2
+
(
L
/
R
)
s
+
1
=
g
m
r
o
u
t
R
f
2
R
f
1
+
R
f
2
⋅
V
i
n
V
r
a
m
p
⋅
s
R
C
C
C
+
1
(
s
R
C
C
o
u
t
+
1
)
(
s
r
o
u
t
C
C
+
1
)
⋅
s
R
f
1
C
f
+
1
s
R
f
1
R
f
2
R
f
1
+
R
f
2
C
f
+
1
⋅
1
+
s
C
R
e
s
r
L
C
s
2
+
(
L
/
R
)
s
+
1
\begin{aligned} T(s)&=g_mr_{out}\frac{sR_CC_C+1} {(sR_CC_{out}+1)(sr_{out}C_C+1)}·\frac{R_{f2}(sR_{f1}C_f+1)} {sR_{f1}R_{f2}C_f+R_{f1}+R_{f2}}·\frac{V_{in}}{V_{ramp}}·\frac{1+sCR_{esr}}{LCs^2+(L/R)s+1} \\[3.5ex] &=g_mr_{out}\frac{R_{f2}}{R_{f1}+R_{f2}}·\frac{V_{in}}{V_{ramp}}·\frac{sR_CC_C+1} {(sR_CC_{out}+1)(sr_{out}C_C+1)}·\frac{sR_{f1}C_f+1} {s\frac{R_{f1}R_{f2}}{R_{f1}+R_{f2}}C_f+1}·\frac{1+sCR_{esr}}{LCs^2+(L/R)s+1} \end{aligned}
T(s)=gmrout(sRCCout+1)(sroutCC+1)sRCCC+1⋅sRf1Rf2Cf+Rf1+Rf2Rf2(sRf1Cf+1)⋅VrampVin⋅LCs2+(L/R)s+11+sCResr=gmroutRf1+Rf2Rf2⋅VrampVin⋅(sRCCout+1)(sroutCC+1)sRCCC+1⋅sRf1+Rf2Rf1Rf2Cf+1sRf1Cf+1⋅LCs2+(L/R)s+11+sCResr 在这里将RLC环路GRLC(s)的零极点记为fz,LC和fp,LC;反馈F(s)的零极点记为fz,F和fp,F;误差放大器及其补偿GEA(s)的零极点记为fz,EA、fp1,EA、fp2,EA。
将比较器、开关管和RLC网络的传输函数合并组成被补偿网络
G
P
W
M
(
s
)
G
S
W
(
s
)
G
R
L
C
(
s
)
=
V
i
n
V
r
a
m
p
1
+
s
C
R
e
s
r
L
C
s
2
+
(
L
/
R
)
s
+
1
\begin{aligned} G_{PWM}(s)G_{SW}(s)G_{RLC}(s)=\frac{V_{in}}{V_{ramp}}\frac{1+sCR_{esr}}{LCs^2+(L/R)s+1} \end{aligned}
GPWM(s)GSW(s)GRLC(s)=VrampVinLCs2+(L/R)s+11+sCResr
令
L
=
2.2
u
H
,
C
=
4.7
u
F
,
R
e
s
r
=
10
m
Ω
,
R
=
1
Ω
,
V
i
n
=
3.3
V
,
V
r
a
m
p
=
2
V
\begin{aligned} 令L=2.2uH,C=4.7uF,R_{esr}=10mΩ,R=1Ω,V_{in}=3.3V,V_{ramp}=2V \end{aligned}
令L=2.2uH,C=4.7uF,Resr=10mΩ,R=1Ω,Vin=3.3V,Vramp=2V 代入得到共轭极点和零点
f
p
,
L
C
≈
50
k
H
z
,
f
z
,
L
C
=
1
2
π
C
R
e
s
r
≈
3.3
M
H
z
\begin{aligned} f_{p,LC}≈50kHz,f_{z,LC}=\frac{1}{2πCR_{esr}}≈3.3MHz \end{aligned}
fp,LC≈50kHz,fz,LC=2πCResr1≈3.3MHz 得到其波特图如图3.11,可以看到极点fp,LC处相位变化非常快,如果加上误差放大器的增益,系统一定是不稳定的,因此需要对这条曲线进行补偿。补偿的方式很简单,在共轭极点处引入零点,减缓相位变化。

将反馈和误差放大器及其补偿的传输函数合并组成补偿网络
G
E
A
(
s
)
F
(
s
)
=
g
m
r
o
u
t
R
f
2
R
f
1
+
R
f
2
s
R
C
C
C
+
1
(
s
R
C
C
o
u
t
+
1
)
(
s
r
o
u
t
C
C
+
1
)
⋅
s
R
f
1
C
f
+
1
s
R
f
1
R
f
2
R
f
1
+
R
f
2
C
f
+
1
\begin{aligned} G_{EA}(s)F(s)=g_mr_{out}\frac{R_{f2}}{R_{f1}+R_{f2}}\frac{sR_CC_C+1} {(sR_CC_{out}+1)(sr_{out}C_C+1)}·\frac{sR_{f1}C_f+1} {s\frac{R_{f1}R_{f2}}{R_{f1}+R_{f2}}C_f+1} \end{aligned}
GEA(s)F(s)=gmroutRf1+Rf2Rf2(sRCCout+1)(sroutCC+1)sRCCC+1⋅sRf1+Rf2Rf1Rf2Cf+1sRf1Cf+1
令
g
m
=
10.56
u
S
,
r
o
u
t
=
714
M
Ω
\begin{aligned} 令g_m=10.56uS,r_{out}=714MΩ \end{aligned}
令gm=10.56uS,rout=714MΩ 误差放大器及其补偿引入了两个极点和一个零点
f
p
1
,
E
A
=
1
2
π
r
o
u
t
C
C
,
f
p
2
,
E
A
=
1
2
π
R
C
C
o
u
t
,
f
z
,
E
A
=
1
2
π
R
C
C
C
\begin{aligned} f_{p1,EA}=\frac{1}{2πr_{out}C_C},f_{p2,EA}=\frac{1}{2πR_CC_{out}},f_{z,EA}=\frac{1}{2πR_CC_C} \end{aligned}
fp1,EA=2πroutCC1,fp2,EA=2πRCCout1,fz,EA=2πRCCC1 反馈引入了一个极点和一个零点
f
p
,
F
=
1
2
π
R
f
1
R
f
2
R
f
1
+
R
f
2
C
f
,
f
z
,
F
=
1
2
π
R
f
1
C
f
,
f
p
,
F
f
z
,
F
=
R
f
1
+
R
f
2
R
f
2
\begin{aligned} f_{p,F}=\frac{1}{2π\frac{R_{f1}R_{f2}}{R_{f1}+R_{f2}}C_f},f_{z,F}=\frac{1}{2πR_{f1}C_f},\frac{f_{p,F}}{f_{z,F}}=\frac{R_{f1}+R_{f2}}{R_{f2}} \end{aligned}
fp,F=2πRf1+Rf2Rf1Rf2Cf1,fz,F=2πRf1Cf1,fz,Ffp,F=Rf2Rf1+Rf2 极点fp1,EA很小,作为系统的主极点;将两个零点放到共轭极点处fp,LC=fz,EA=fz,F;剩下的两个极点fp2,EA、fp,F要尽可能大,不要让其影响系统。
令
R
f
1
=
400
k
Ω
,
R
f
1
=
100
k
Ω
,
f
p
1
,
E
A
=
2
H
z
→
C
C
=
110
p
F
\begin{aligned} 令R_{f1}=400kΩ,R_{f1}=100kΩ,f_{p1,EA}=2Hz→C_C=110pF \end{aligned}
令Rf1=400kΩ,Rf1=100kΩ,fp1,EA=2Hz→CC=110pF
f
z
,
E
A
=
f
p
,
L
C
≈
50
k
H
z
→
R
C
=
29
k
Ω
,
C
f
=
8
p
F
\begin{aligned} f_{z,EA}=f_{p,LC}≈50kHz→R_C=29kΩ,C_f=8pF \end{aligned}
fz,EA=fp,LC≈50kHz→RC=29kΩ,Cf=8pF 画出补偿的波特图如图3.12.

将补偿网络和被补偿网络相乘,最后得到整个系统的波特图如图3.13.红色曲线T(s)就是补偿后的系统函数。

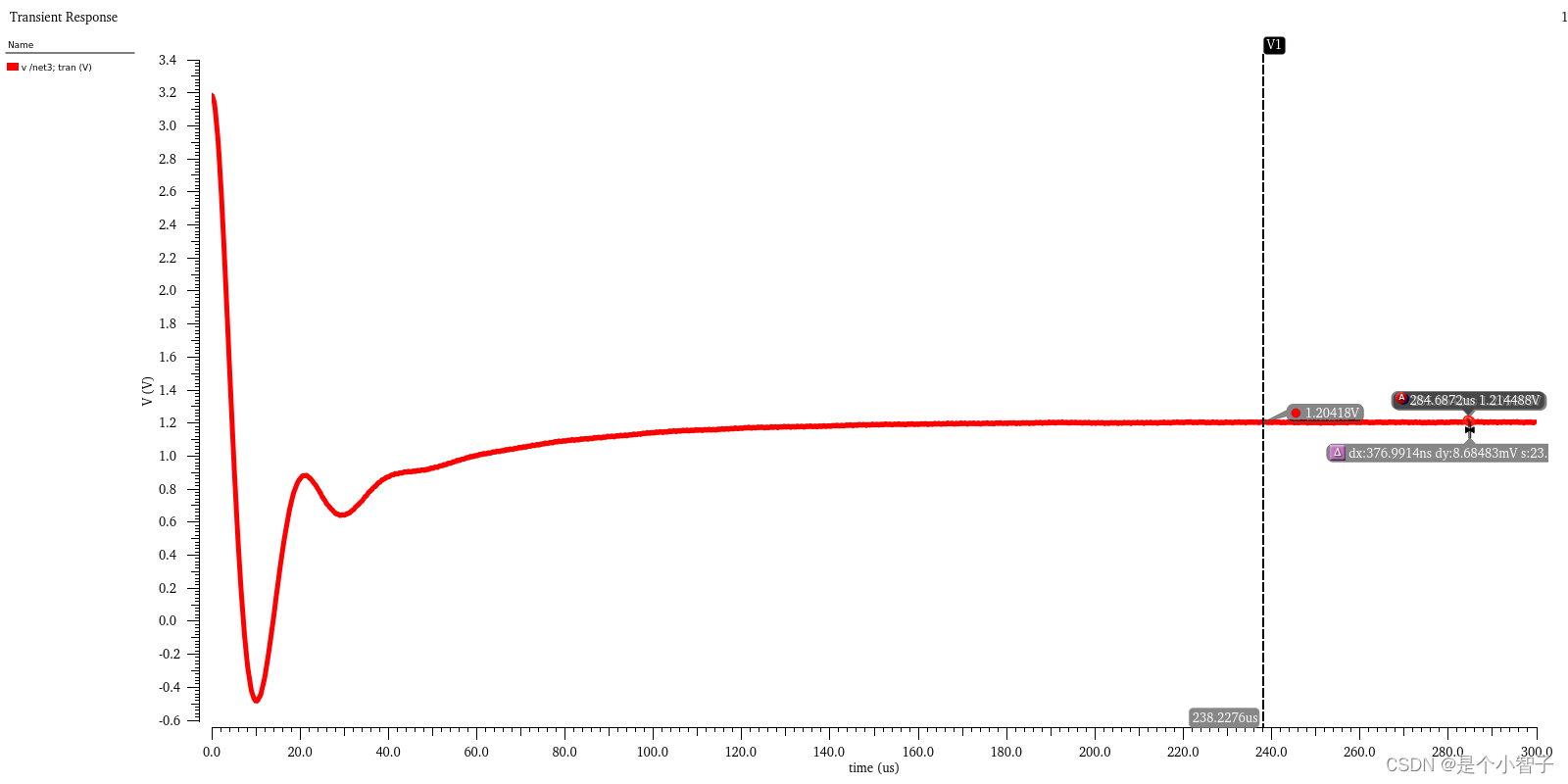
3.5.电路仿真
仿真要求:将3.3V电压转换为1.2V输出。
按照上面一节得到的参数,搭出电路如图3.14。

因为要求输出1.2V,因此设置参考电压Vref为
V
r
e
f
=
V
o
u
t
R
f
2
R
f
1
+
R
f
2
=
1.2
V
×
1
5
=
240
m
V
\begin{aligned} V_{ref}=V_{out}\frac{R_{f2}}{R_{f1}+R_{f2}}=1.2V×\frac{1}{5}=240mV \end{aligned}
Vref=VoutRf1+Rf2Rf2=1.2V×51=240mV 得到仿真结果图3.15,输出为1.2V,有10mV左右的纹波。















 2750
2750











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











