







Apollo第四讲:Apollo高精度地图模块
1 高精度地图与传统地图的区别
精度更高,元素更丰富,更新速度更快
2 为什么需要高精度地图?
- 定位:
- 感知(ROI):红绿灯识别,感知到红绿灯后去找具体位置。减少不必要计算、精度更高
- 规划:变道、左转、右转
3 高精度地图的作用
整体框架图(补充)
4 高精地图面临的挑战和问题
- 更新频率要求高
- 采集难度大
- 存储空间要求大,目前大小可能要上百G
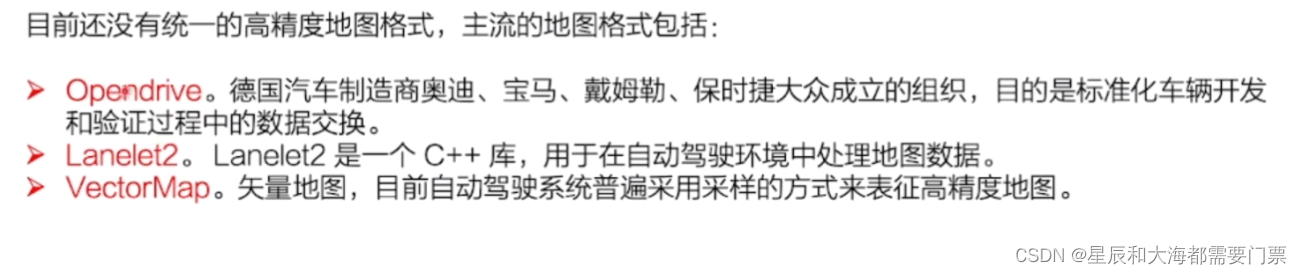
- 成本、格式和规范尚未统一:各家地图容易不兼容,且还有一些法律法规问题
5 高精地图的构成
- 静态图层:道路的测绘信息
- 定位图层:通过原始点云,提取电线杆等信息
- 语义图层:交通标志
- 动态图层:车辆的一些实时信息、道路拥堵情况
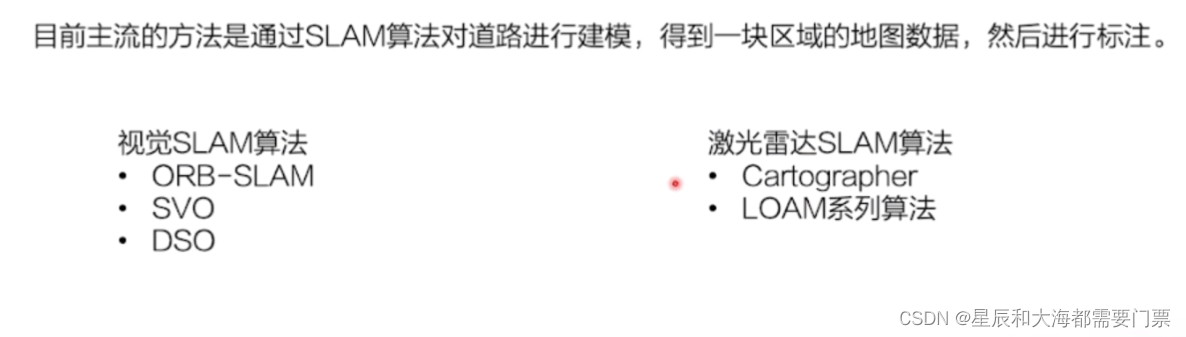
6 高精度地图的制作
- 地图采集:
1)基于激光雷达:受光照影响不大

2)基于视觉:得不到准确深度信息
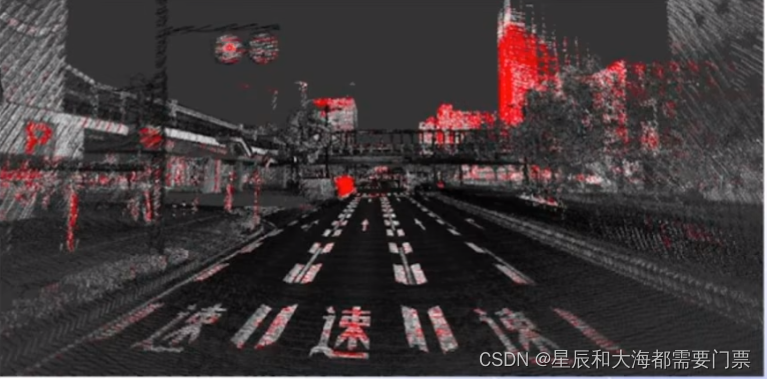
- 地图制作:建模
- 地图标注:模型上标注车道等语义信息
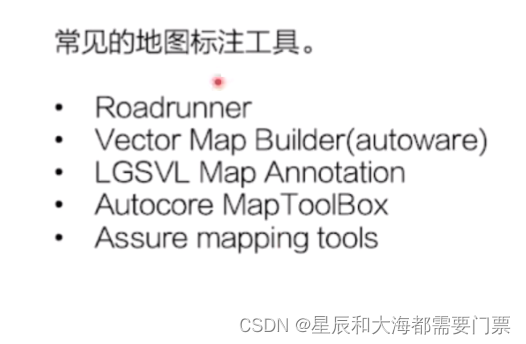
Roadrunner:功能完善,可在仿真器中直接使用
- 地图保存:
7 Apollo高精地图代码介绍
地图元素介绍
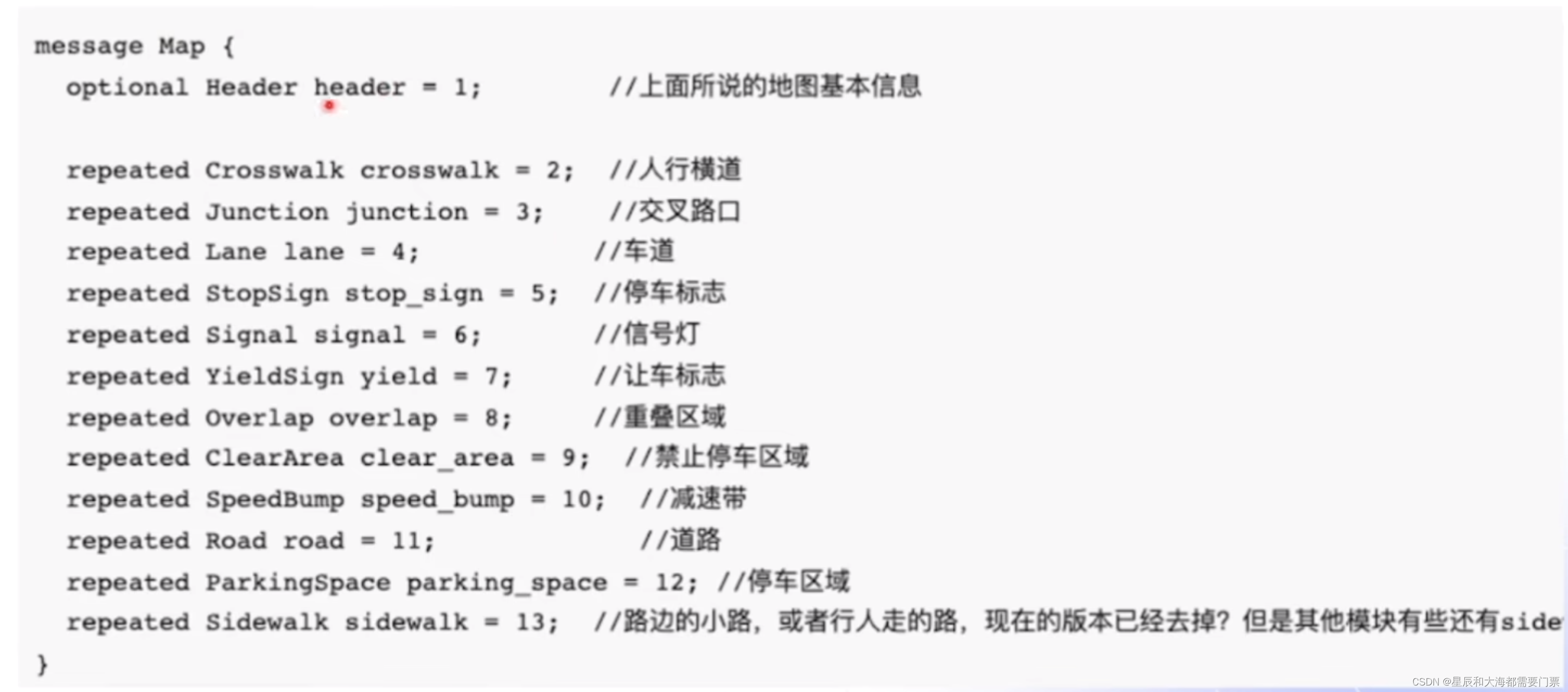
人行横道线

车道标志:直行车道、自行车道、右转

红绿灯标志

禁停标志

减速带

停车场

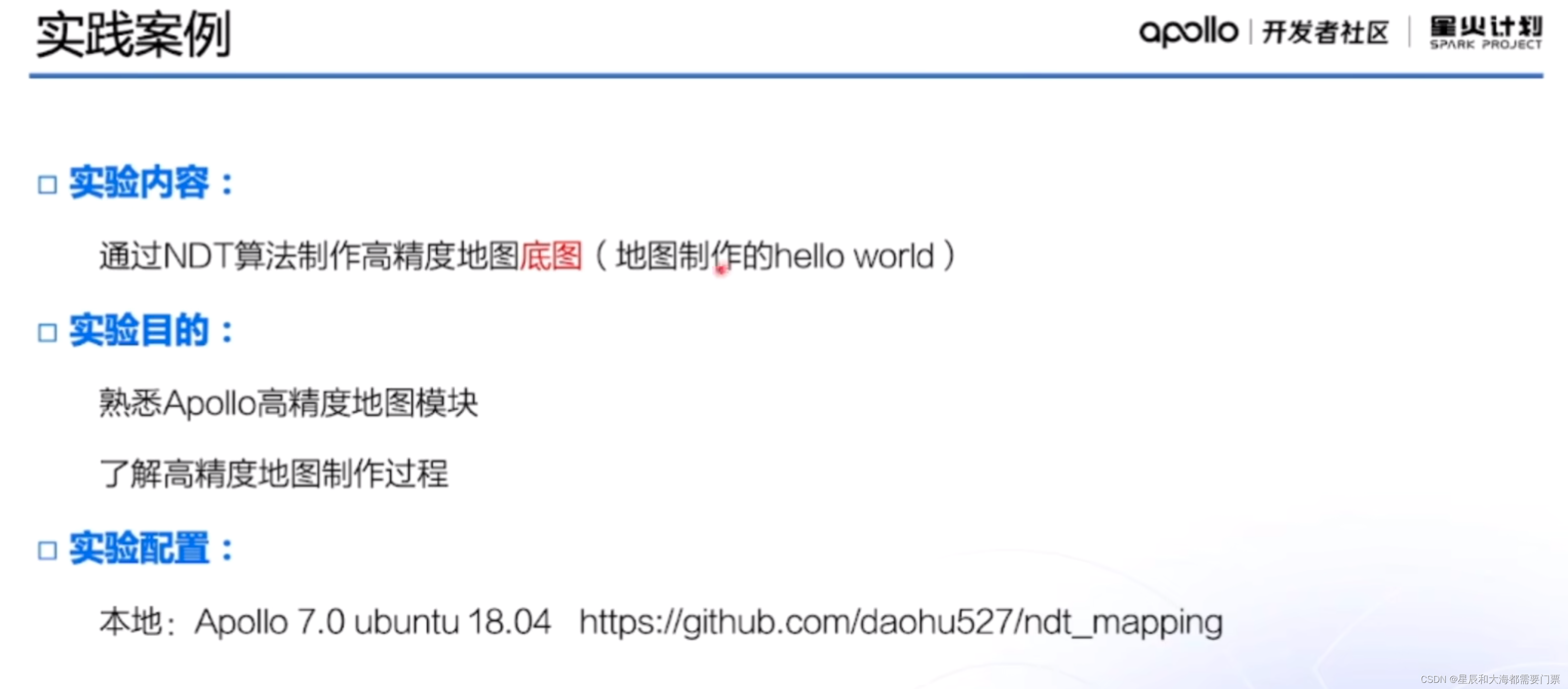
8 高精度地图实践–作业
8.1教程介绍
(1) 查看PCD文件

(2)对每两帧的PCD文件进行配准,得到校正后的位置信息,然后拼接这两个点云,重复上述步骤直到做出整张地图。
(3)最终PCD点云效果图
8.2 实验记录
在github(https://github.com/daohu527/ndt_mapping)下载ndt_mapping,解压后执行以下操作
bash docker/dev_into.sh
# in docker
cd ndt_mapping/
bazel build src/ndt_mapping
./bazel-bin/src/ndt_mapping
```镜像这块花费时间较长
下载
# 9 本章小结
速度变慢问题:做个过滤算法

















 777
777











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











