






1 velodyne的使用
基于 velodyne实时显示点云地图
链接参考,非常详细,对着来就行。
操作步骤如下:
(1)配置有线连接
IP地址:192.168.1.155
子网掩码:255.255.255.0
网关:要么192.168.1.1,要么不设置不管
(2)安装Ros依赖
sudo apt-get install ros-melodic-velodyne
(3)创建Ros工程
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro indigo -y
catkin_make
source devel/setup.bash
(4)连接好设备
激光雷达正常供电,然后电脑和雷达之间通过网线连接。
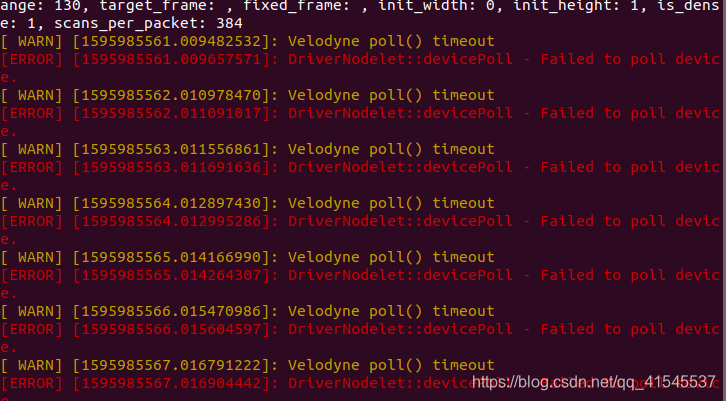
(5)打开终端,运行命令:——出错了
roslaunch velodyne_pointcloud VLP16_points.launch
之前搜索资料发现好多说time out的原因是内网上的端口号与ip没有对起来与launch文件没有对起来,但仔细核对却发现网站(192.168.1.201)上端口号和ip与launch文件中的端口号与ip都对起来了,(注意:launch文件中的ip缺省,但其默认为192.168.1.201,当内网打不开的时候,自己修改该ip反而没法正常显示数据了,原因不清楚),但却提示有错误,原因尚且不知,更换设备依旧错误相同,错误提示如下图所示
起初以为是kinetic与molodic版本不一致,后来发现velodyne针对这两个版本下载的内容好像是一样的
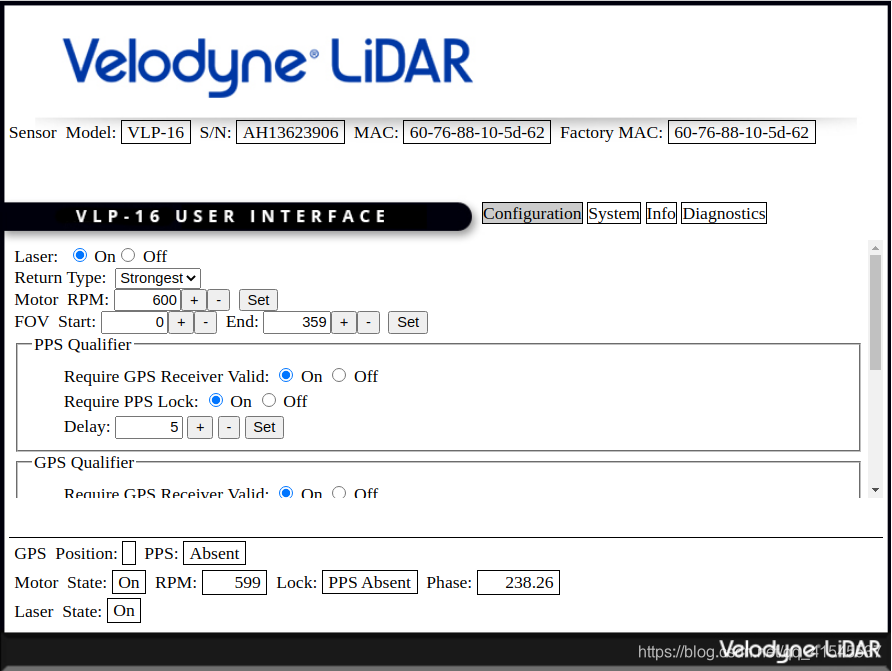
解决方案1:在内网中(192.168.1.201)全部配置为on就可以了,具体配置如下
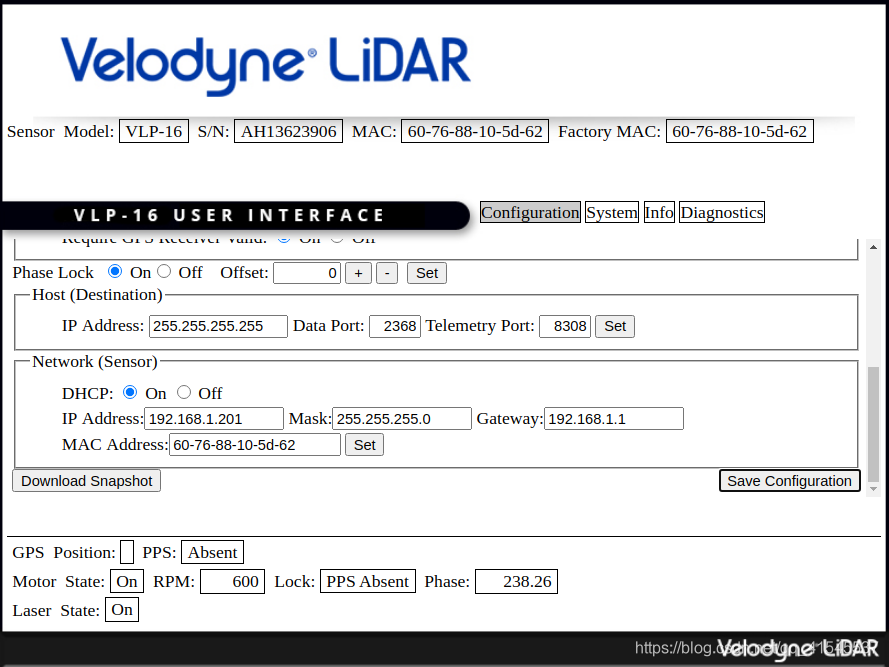
解决方案2:将launch文件中的ip改为缺省值,针对ip内网打不开的情况,原因不清楚

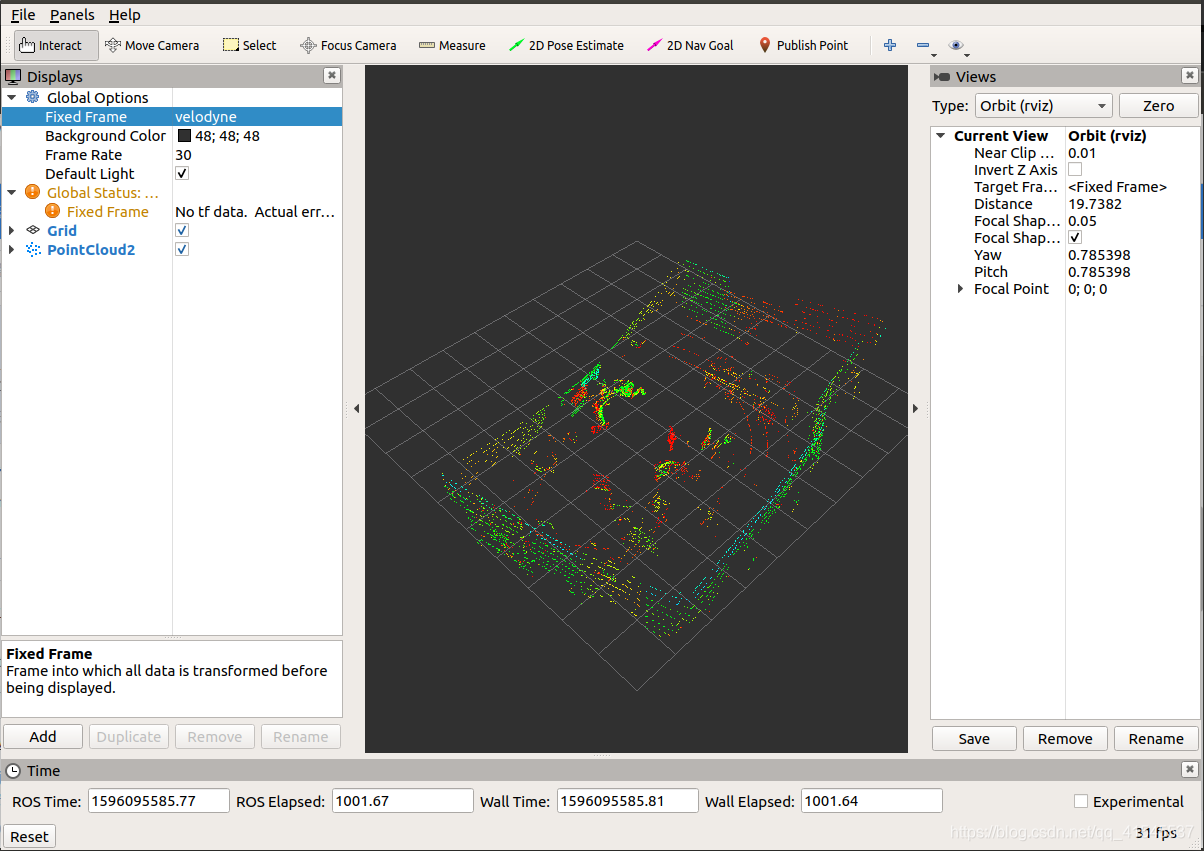
rviz中进行显示——成功
正常显示前提是:会发现add/by topic/PointCloud2添加后标红,Fixed frame一修改为velodyne就正常显示了
roslaunch velodyne_pointcloud VLP16_points.launch
rosrun rviz rviz
(6) 订阅points主题,监测是否有数据输出
rostopic echo /velodyne_pionts















 918
918











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











