







感谢百川同学。总结的东西都比较精炼,自己去看多视图几何,可能效率不太高。 所以在百川同学整理得基础上走一走。
1. 2D射影几何与变换。
1.1 点与直线的非齐次与其次表达
- 平面 R2 上的点表示为列矢量 (x,y)T, x'= (x,y)T, x 默认为列矢量。点的齐次表达 x = (x1,x2,x3)T 表示 R2 上的点 x' = (x1/x3,x2/x3)T。
- 平面 R2 上的直线表达式为 ax + by +c = 0,直线l可其次表达为(a,b,c)T,因为对任意非零k,ax + by + c = 0 和 k(ax+ by +c) = 0 代表的是同一条直线。
Explain:
x' 代表非齐次坐标,x代表齐次坐标;
对于点,(x,y)是行矢量,(x,y)T是列矢量;
对于直线,n = (a,b)T是直线(a,b,c)T的垂线(想想怎么理解),dis = c/||n||为原点到直线的距离1.2 点与直线的关系定理
点 x 在直线l上的充要条件是 xT*l=0
Example:
x = (-7,2,1)T,代表平面 R2 上的点 (-7,2)T;
直线 l = (1,3,1)T 代表 x+3y+1 = 0;
xTl = (-7,2,1).(1,3,1)T = 0;
两直线l 和 l'的交点 x = l x l' 想一想这个是怎么证明的。
Example:
l = (-1,0,1)T,即 x = 1;l' = (0,-1,1)T, 即y = 1.
l x l' = (1,1,1)T,非齐次坐标点(1,1)T 即为交点坐标。其中叉乘运算为

过两点 x x'的直线 l 为 l = x x x' 同理想一想这个是怎么证明的。
Example:
参考两直线的交点结论,2维射影几何中存在对偶原理:点线可以互相转换.1.3 理想点和无穷远点
考虑到点的齐次表达式 x = (x1,x2,x3)T, 当x3 != 0时,点属于 R2 空间,当x3 = 0时,点属于基于 R2 扩展的 P2射影平面上。
Example:
考虑到两条直线 l1 = (-1,0,1)T,即 x = 1, l2 = (-1,0,2)T,即 x=2.
我们计算两条直线的交点 x = l1 x l2 = (0,1,0)T.
即两条平行线的交点 x3 = 0.所有的 x3 = 0的点在直线 l oo = (0,0,1)T,我们可以证明,(x1,x2,0)(0,0,1)T = 0,即所有理想点都在无穷远直线上。(仔细想以想)
1.4 射影平面模型
P2 可以看作是 R3 中的过原点的射线和 x1 x2平面的集合。
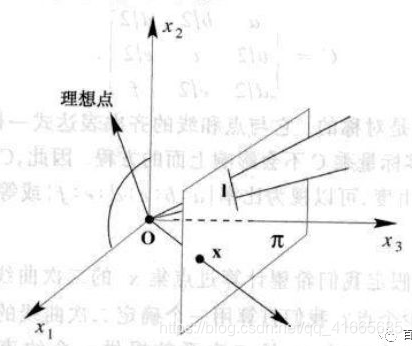
Explain:
理想点:x = (x1,x2,0)T,理想点的集合是x1x2平面内过原点的射线。
无穷远点是理想点的集合,这里是x1x2平面。
P2 中的点可以看作 R3 中过原点的射线与 x3 = 1平面的交点。同理 P2中的线可以看作 R3中过原点的平面与x3 = 1 平面的交线。1.5 各种变换对比

Explain:
R = [rij]是正交矩阵,即 RT = R-1 ,且R的行列式为1
A = [aij]是可逆矩阵,即为非奇异矩阵
射影变换有8个自由度,严格意义上需要四个不完全共线的点求解,但是如果只是为了度量性质的回复,比如长度、角度,我们只需要把射影变换(8自由度)恢复到相似变换(4自由度)即可。
这里涉及两个知识点,一个是无穷远线可以效出射影失真,另一个是虚圆点可以消除仿射失真,剩下的只有相似失真。2. 3D射影几何与变换
2.1 点平面的齐次与非齐次表达
三维空间 R3 上的点 x' 表示为矢量(x,y,z)T.点的齐次表达 x = (x1,x2,x3,x4)T 表示 R3 上的点 x' = (x1/x4,x2/x4,x3/x4)T 。
三维空间 R3 上的平面 & 表示为 ax + by + cz +d = 0.面的齐次坐标为(a,b,c,d)T.
Explain:
n = (a,b,c)T 是平面(a,b,c,d)T 的法向量,dis = d/||n||为原点到平面的距离。2.2 点与平面的关系定理
点 x 在直线 l 上的充要条件是 xTl = 0
Example:
在P3中,点与平面对偶,这里lTx 同样成立。
在P2中,点与直线对偶。2.3 空间中直线的表示方法
Extend:
除了两平面交点相交于一条直线,还可以表示为:
(1)点向式:点和直线方向可以确定一条直线。
(2)两点式:空间两点确定一条直线。
更多三维空间中点,直线和面的相互交集运算请查阅 Plucker 坐标。2.4 理想无穷远平面
考虑到平面的齐次表达 H oo = (x1,x2,x3,x4)T, H oo=(0,0,0,1)T时,为无穷远平面。
Example:
两个平面相平行的充要条件是他们的交线在 H oo上。
直线与直线(或平面)平行的是他们的交线在 H oo上。2.5 各种变换对比
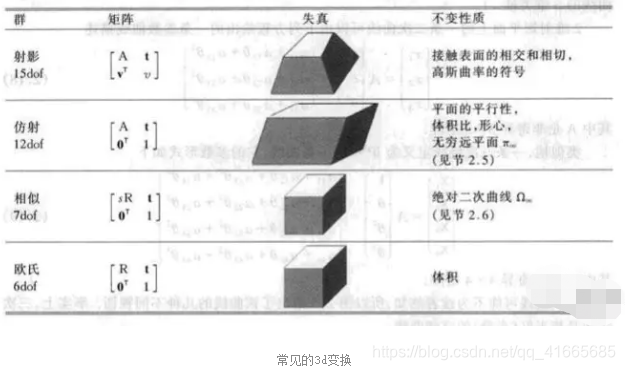
Expalin:
R 是正交矩阵,且R的行列式为1
A是可逆矩阵,即为非奇异矩阵。
射影变换有15个自由度,其中7个用于相似变换部分(位移三个,旋转三个,缩放比例因子1个),仿射变换部分五个,射影变换部分三个。

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









