










 本文详细介绍了如何使用FPGA解码索尼IMX327MIPI相机的4LaneRAW12模式视频,包括自定义MIPICSIRXIP的使用、图像ISP处理、UVC时序同步等步骤,并提供了两套针对P3和P4接口的工程源码,以及开发板和移植注意事项。
本文详细介绍了如何使用FPGA解码索尼IMX327MIPI相机的4LaneRAW12模式视频,包括自定义MIPICSIRXIP的使用、图像ISP处理、UVC时序同步等步骤,并提供了两套针对P3和P4接口的工程源码,以及开发板和移植注意事项。
目录
FPGA高端项目:解码索尼IMX327 MIPI相机转USB3.0 UVC 输出,提供FPGA开发板+2套工程源码+技术支持
1、前言
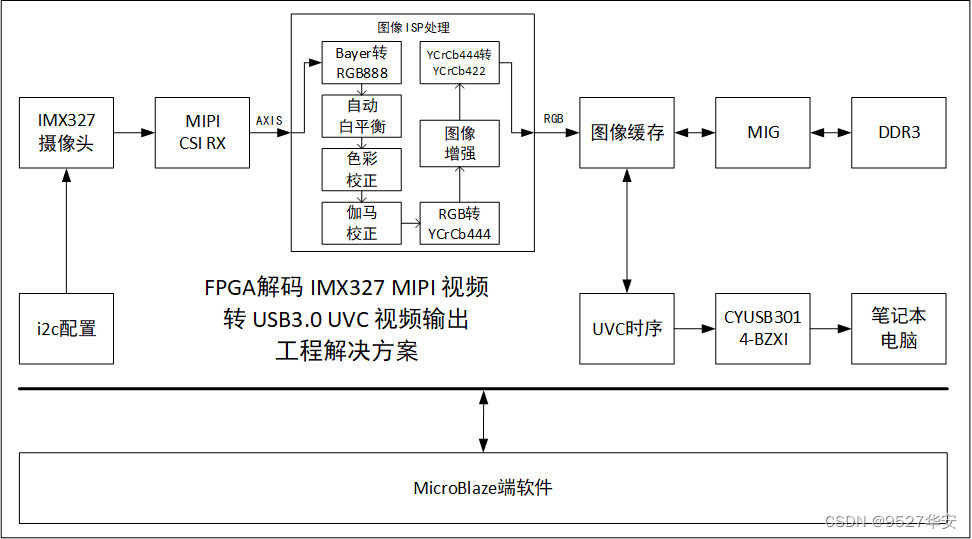
FPGA图像采集领域目前协议最复杂、技术难度最高之一的应该就是MIPI协议了,MIPI解码难度之高,令无数英雄竞折腰,以至于Xilinx官方不得不推出专用的IP核供开发者使用,不然太高端的操作直接吓退一大批FPGA开发者,就没人玩儿了。本设计基于Xilinx的Kintex7-325T中端FPGA开发板,采集IMX327 MIPI摄像头的4 Lane MIPI视频,IMX327 摄像头配置为 MIPI4 Lane RAW12模式,输出有效分辨率为1920x1080@60Hz;IMX327 MIPI摄像头引脚经过权电阻方案分出LP电路后接入FPGA的HS BANK的LVDS差分IO;采用自定义的MIPI CSI RX解码IP实现MIPI的D_PHY+CSI_RX功能,输出AXI4-Stream格式的RAW12颜色视频,该IP由本博免费提供;至此,MIPI视频解码工作完成,但此时的视频还是原始的RAW12格式,远远达不到输出显示要求,所以还需进行图像处理操作,也就是图像ISP操作;本博提供及其完整的图像ISP,具体流程包括Bayer转RGB888、自动白平衡、色彩校正、伽马校正、RGB888转YCrCb444、图像增强、YCrCb444转RGB888、YCrCb444转YCrCb422等一系列操作;经过ISP处理后的图像颜色饱满、画质清晰,输出YCrCb422格式的视频;然后再使用本博提供的图像缓存架构将视频缓存到板载的DDR3中;再使用本博提供的UVC视频时序将视频从DDR3中读出;再将UVC视频送入板载的CYUSB3014-BZXI芯片,通过板载的USB3.0接口发送出去;CYUSB3014-BZXI芯片在Win10下可以免驱使用,用USB3.0数据线连接FPGA开发板和笔记本电脑,打开电脑自带的摄像头软件,选择本开发板的摄像头,即可显示IMX327 MIPI摄像头解码采集的视频了;针对目前市面上主流的索尼IMX系列相机,本方案一共移植了2套工程源码,本博文介绍其中基于索尼IMX327相机的2套工程,详情如下:
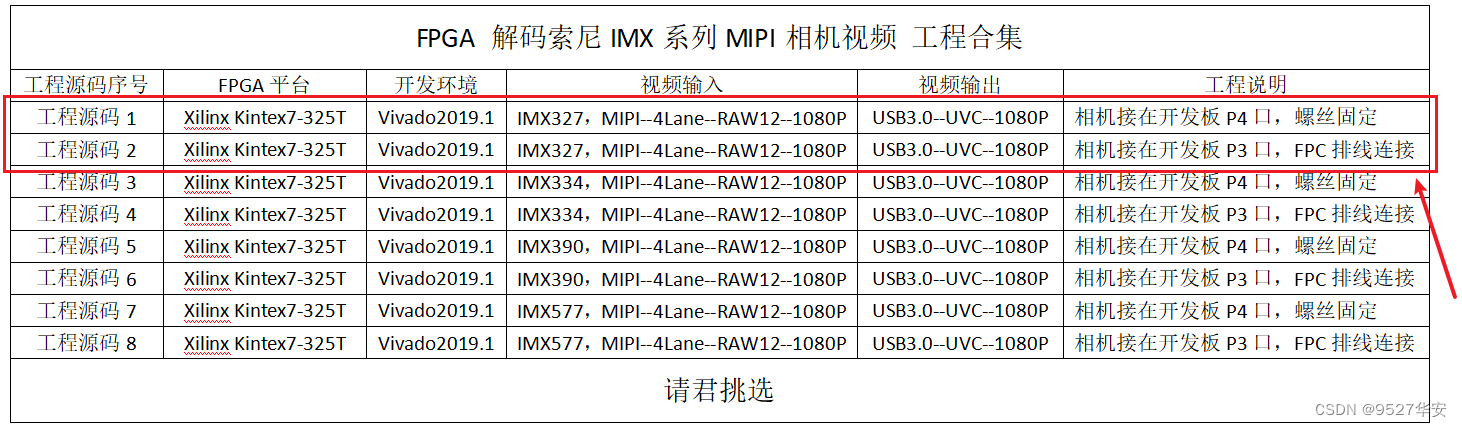
这里说明一下提供的2套工程源码的作用和价值,如下:
工程源码1:Xilinx Kintex7-325T FPGA 解码索尼的 IMX327 MIPI相机,IMX327 被配置为 4 Lane RAW12 1080P分辨率;经FPGA解码、ISP图像处理、图像缓存、UVC时序同步等操作后,通过板载的USB3.0接口输出;本工程的相机接在配套FPGA开发板的P4接口,该接口的相机通过螺丝固定,相机不可独立移动;
工程源码2:Xilinx Kintex7-325T FPGA 解码索尼的 IMX327 MIPI相机,IMX327 被配置为 4 Lane RAW12 1080P分辨率;经FPGA解码、ISP图像处理、图像缓存、UVC时序同步等操作后,通过板载的USB3.0接口输出;本工程的相机接在配套FPGA开发板的P3接口,该接口的相机通过FPC软排线连接,相机可独立移动;
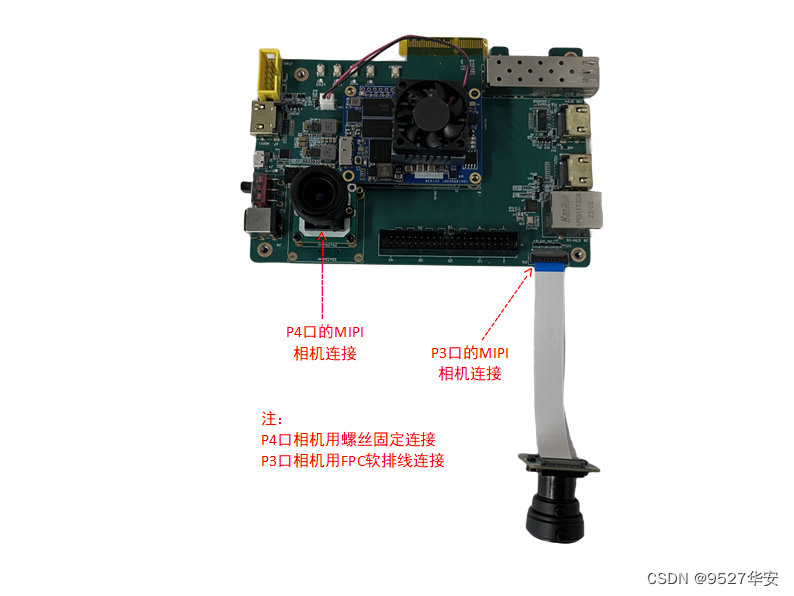
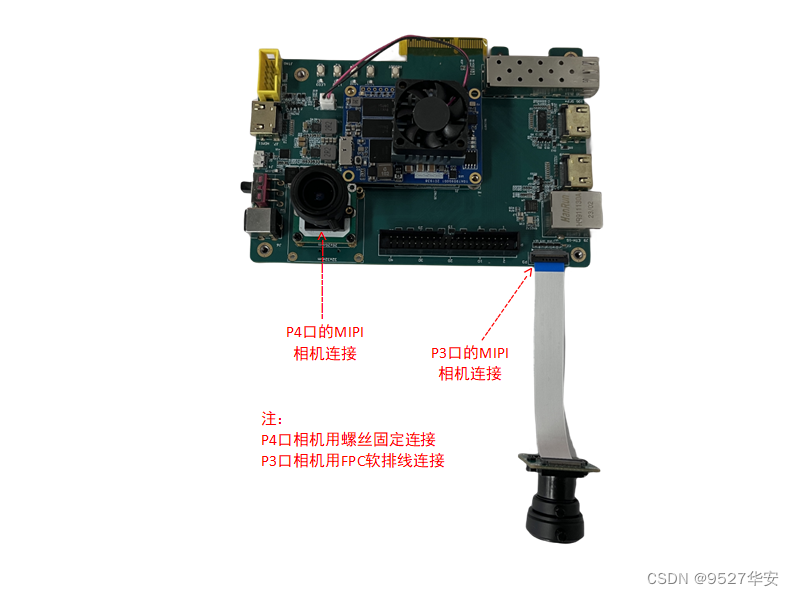
相机在FPGA开发板P3和P4口的连接方式如下图:
免责声明
本工程源码只是本博提供的FPGA高端图像处理开发板的测试例程使用,本工程及其源码即有自己写的一部分,也有网络公开渠道获取的一部分(包括CSDN、Xilinx官网、Altera官网以及其他开源免费获取渠道等等),若大佬们觉得有所冒犯,请私信批评教育;部分模块源码转载自上述网络,版权归原作者所有,如有侵权请联系我们删除;基于此,本工程及其源码仅限于读者或粉丝个人学习和研究,禁止用于商业用途,若由于读者或粉丝自身原因用于商业用途所导致的法律问题,与本博客及博主无关,请谨慎使用。。。
2、相关方案推荐
我这里已有的 MIPI 编解码方案
我这里目前已有丰富的基于FPGA的MIPI编解码方案,主要是MIPI解码的,既有纯vhdl实现的MIPI解码,也有调用Xilinx官方IP实现的MIPI解码,既有2line的MIPI解码,也有4line的MIPI解码,既有4K分辨率的MIPI解码,也有小到720P分辨率的MIPI解码,既有基于Xilinx平台FPGA的MIPI解码也有基于Altera平台FPGA的MIPI解码,还有基于Lattice平台FPGA的MIPI解码,后续还将继续推出更过国产FPGA的MIPI解码方案,毕竟目前国产化方案才是未来主流,后续也将推出更多MIPI编码的DSI方案,努力将FPGA的MIPI编解码方案做成白菜价。。。
基于此,我专门建了一个MIPI编解码的专栏,并将MIPI编解码的博客都放到了专栏里整理,对FPGA编解码MIPI有项目需求或学习兴趣的兄弟可以去我的专栏看看,专栏地址如下:
点击直接前往专栏
3、本 MIPI CSI-RX IP 介绍
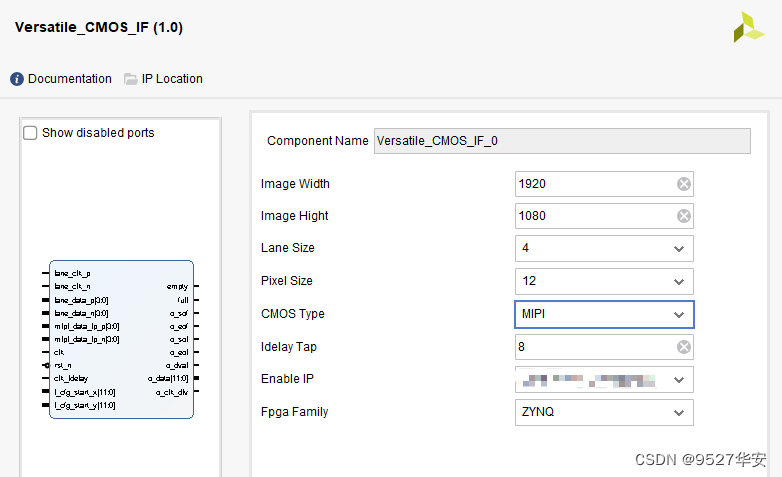
本设计采用自定义的MIPI CSI RX解码IP实现MIPI的D_PHY+CSI_RX功能,输出AXI4-Stream格式的RAW12颜色视频,该IP由本博免费提供;该IP目前只适用于Xilinx A7及其以上系列器件,支持的 4 lane RAW12图像,输入分辨率最高支持4K @30帧;IP UI配置界面如下:
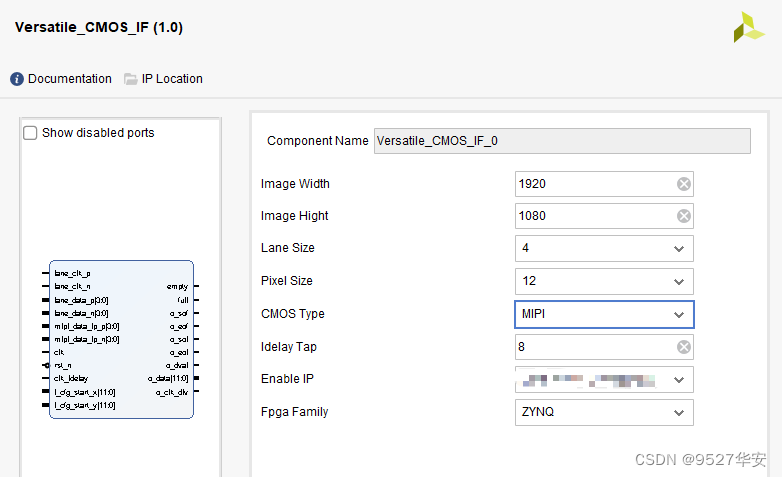
该自定义IP只提供网表不提供源码,但用户依然可以自由使用,和使用Xilixn官方的 MIPI CSI-2 RX Subsystem一样,没有本质区别,因为MIPI CSI-2 RX Subsystem也是看不到源码的;MIPI CSI-RX IP资源消耗如下:

4、个人 FPGA高端图像处理开发板简介
本博客提供的工程源码需配合本博提供的FPGA高端图像处理开发板才能使用,亦或者读者自己拿去移植,但本博推荐使用本博客提供的工程源码需配合本博提供的FPGA高端图像处理开发板,该开发板截图如下:
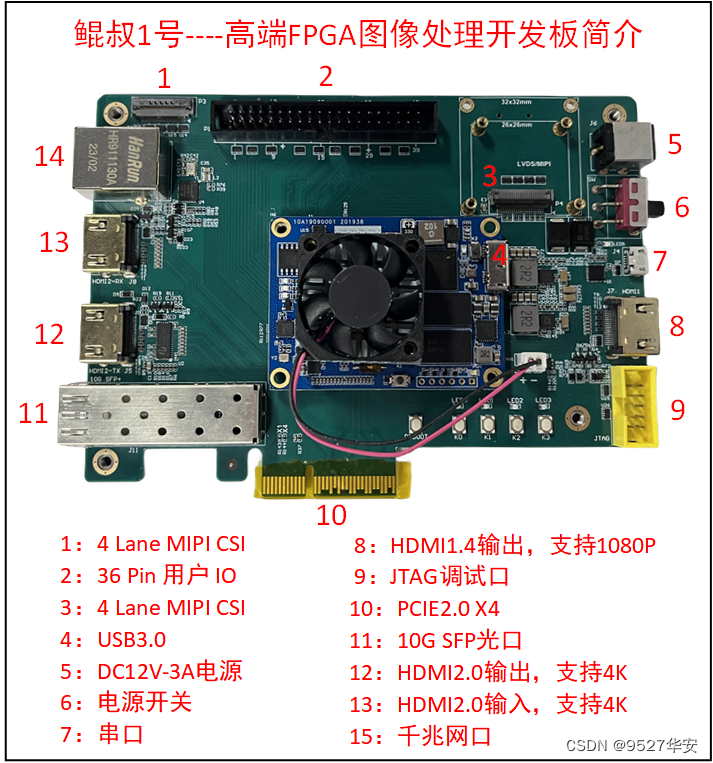
此开发板专为高端FPGA图像处理设计,适合公司项目研发、研究所项目预研、高校项目开发、个人学习进步等场景需求,本博之前专门写过一篇博文详细介绍了该开发板的情况,感兴趣的请移步那篇博文,博客地址如下:
点击直接前往
5、详细设计方案
设计原理框图
设计原理框图如下:
IMX327 及其配置
本设计使用本博提供的专用SONY公司的 IMX327 MIPI相机,该相机输出分辨率达到了1920x1080,采用焦距可调的镜头,清晰度极高,适用于高端项目开发,相机截图如下:

IMX327 MIPI相机需要 i2c配置才能正确使用,本设计调用本博自定义的i2c主机IP实现对IMX327的配置,该IP挂载与AXI-Lite总线上,通过MicroBlaze软核运行的C语言代码实现配置,此外,本博还设计了自动曝光程序,实时读取IMX327 RAW12像素,通过写IMX327对应寄存器的方式实现实时的自动曝光算法,使得IMX327在暗黑的环境下也能输出明亮的图像;
本博提供的FPGA开发板有两个MIPI CSI-RX接口,分别位于P3、P4接口,因此可以接两个MIPI相机,其中,P4接口的相机采用螺丝固定方式连接,适用于FPGA开发板需要移动的项目,如小车等;P3接口的相机采用FPC软排线方式连接,适用于FPGA开发板不需要移动的项目,如固定检测等,具体连接方式如下图:
MIPI CSI RX
本设计采用自定义的MIPI CSI RX解码IP实现MIPI的D_PHY+CSI_RX功能,输出AXI4-Stream格式的RAW12颜色视频,该IP由本博免费提供;该IP目前只适用于Xilinx A7及其以上系列器件,支持的 4 lane RAW12图像,输入分辨率最高支持4K @30帧;IP UI配置界面如下:
该自定义IP只提供网表不提供源码,但用户依然可以自由使用,和使用Xilixn官方的 MIPI CSI-2 RX Subsystem一样,没有本质区别,因为MIPI CSI-2 RX Subsystem也是看不到源码的;
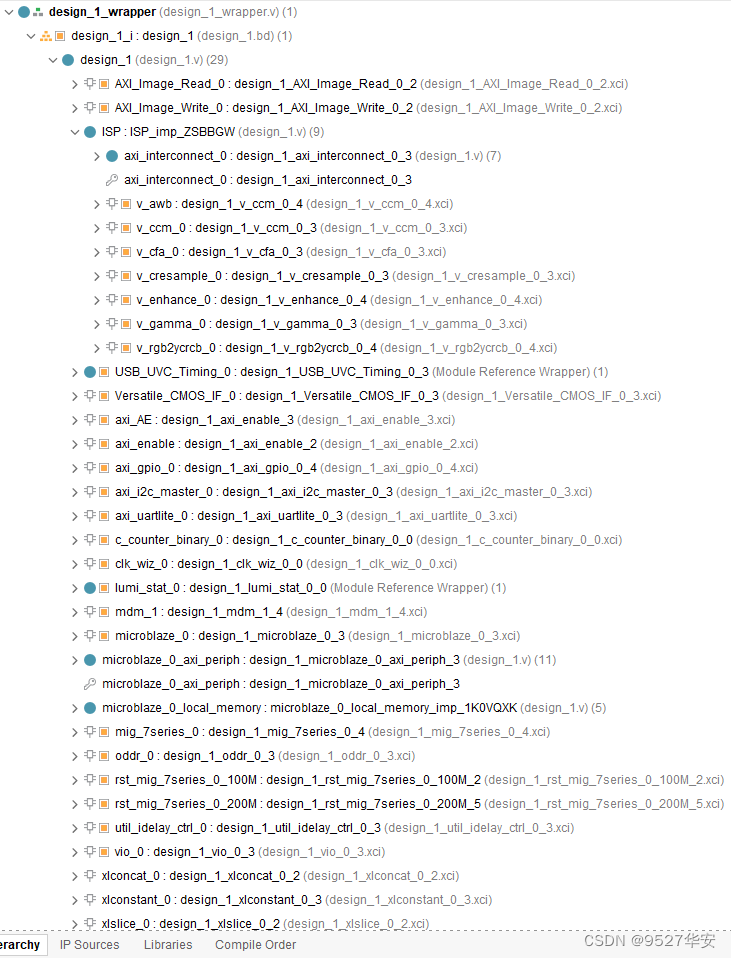
图像 ISP 处理
本博提供及其完整的图像ISP,具体流程包括Bayer转RGB888、自动白平衡、色彩校正、伽马校正、RGB888转YCrCb444、图像增强、YCrCb444转RGB888、YCrCb444转YCrCb422等一系列操作;经过ISP处理后的图像颜色饱满、画质清晰,输出YCrCb422格式的视频;图像 ISP 处理在工程 Block Design中如图:
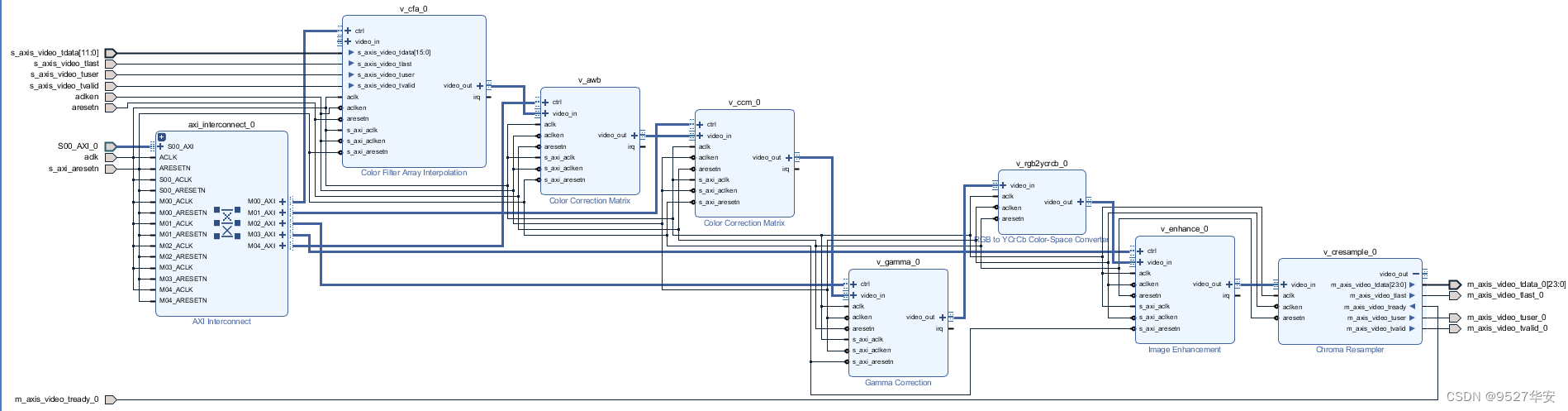
这些IP均为Xilinx的免费IP,有的需要配置才能使用,在MicroBlaze软核运行的C语言代码已经提供了配置程序;
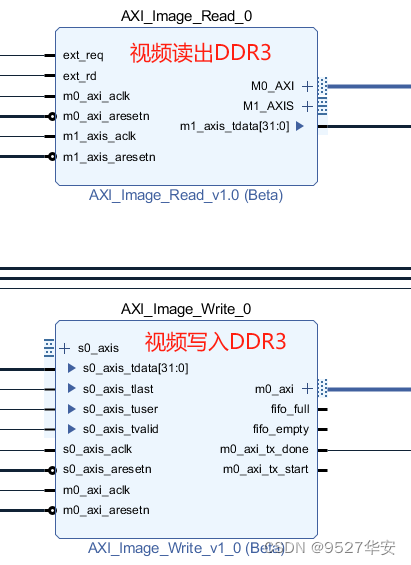
图像缓存
本设计使用本博提供的图像缓存读写IP实现视频缓存,该IP由纯verilog代码实现,用户接口为AXI4-Stream,可替换Xilinx官方的VDMA,本博已将他封装为自定义IP;图像缓存模块IP在工程 Block Design中如图:
需要注意的是,图像缓存架构需调用Xilinx的 MIG IP才能实现与DDR3的物理层交互;
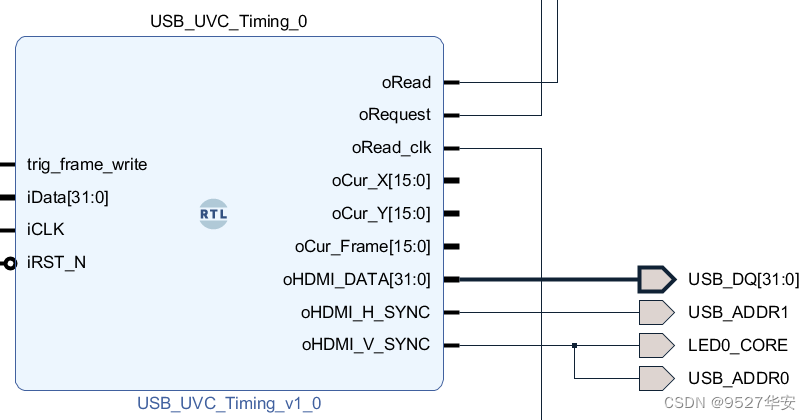
UVC 时序
UVC 时序用于控制视频读出DDR3的时序,然后将读出的视频送入 USB3.0输出架构,UVC 时序很简单,与常用的VGA时序差不多,由纯verilog代码实现,将模块顶层代码拖入 Block Design中,如图:
USB3.0输出架构
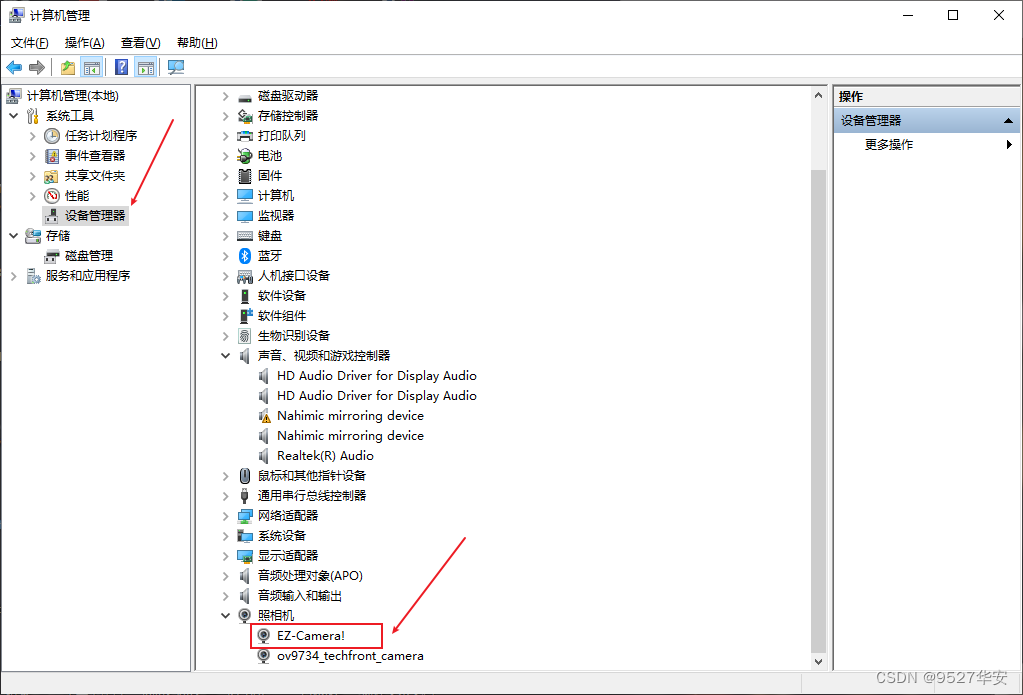
UVC视频送入板载的CYUSB3014-BZXI芯片,通过板载的USB3.0接口发送出去;CYUSB3014-BZXI芯片在Win10下可以免驱使用,用USB3.0数据线连接FPGA开发板和笔记本电脑,打开电脑自带的摄像头软件,选择本开发板的摄像头,即可显示IMX327 MIPI摄像头解码采集的视频了;打开笔记本电脑的设备管理器,即可看到本开发板的USB3.0设备,如下:
打开电脑自带的摄像头软件后输出如下:

FPGA逻辑设计工程源码架构
提供的两套工程源码代码架构都一样,只是引脚约束不同;
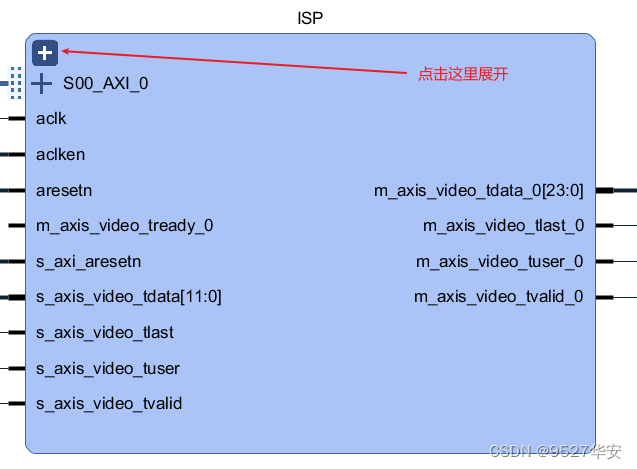
工程Block Design如下:
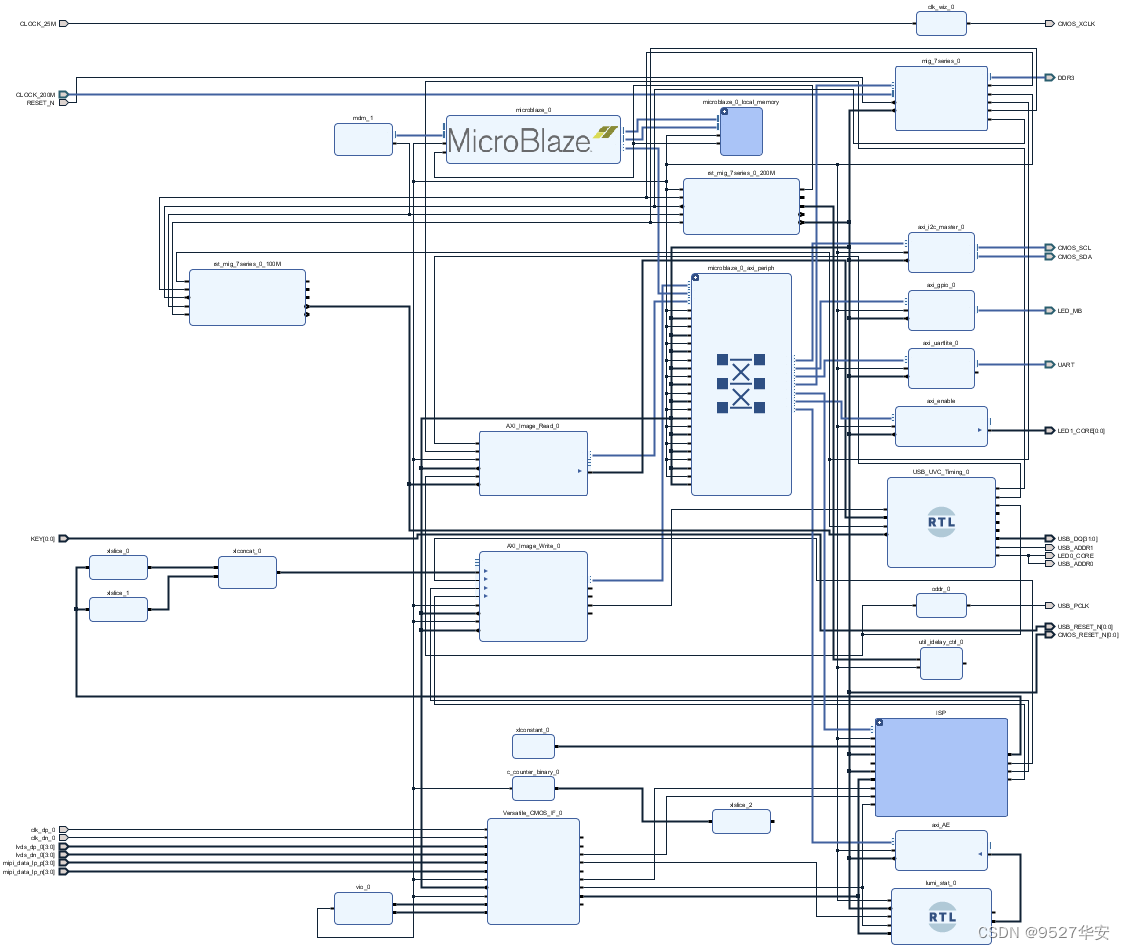
由于调用IP较多,分散开来很不好看,也不利于阅读,本博将一些IP进行了再封装,如下图中红框标记部分,该封装只是形式上的好看而已,没有特殊功能,可以通过如下方法将其展开,查看里面的详细组成和结构,如下:
工程代码架构如下:
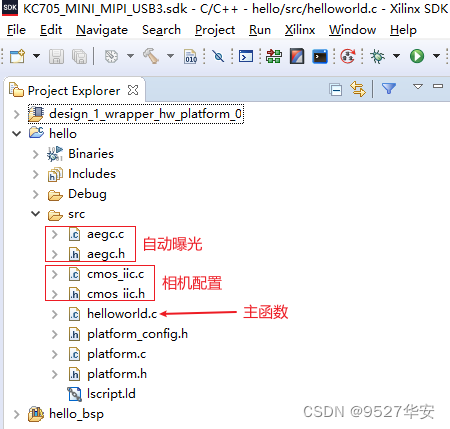
SDK软件工程源码架构
提供的两套工程源码代码架构都一样,只是引脚约束不同;
SDK软件工程源码架构如下:
6、工程源码1–>P4口相机
开发板FPGA型号:Xilinx–Kintex7–xc7k325tffg676-2;
开发环境:Vivado2019.1;
相机接口:开发板P4口,固定螺丝连接,相机不可自由移动;
输入:IMX327摄像头–MIPI–4 Lane–RAW12-1920x1080;
输出:USB3.0,分辨率1920x1080;
应用:FPGA高端项目:IMX327 MIPI 视频解码 USB3.0 UVC 输出;
工程源码架构请参考第五章节的“FPGA逻辑设计工程源码架构”和“SDK软件工程源码架构”
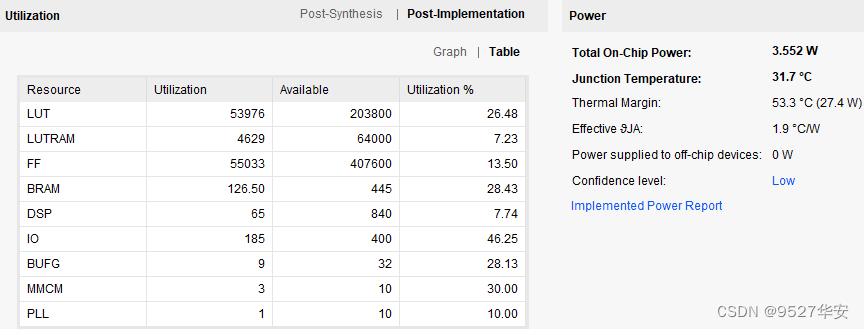
工程的资源消耗和功耗如下:
7、工程源码2–>P3口相机
开发板FPGA型号:Xilinx–Kintex7–xc7k325tffg676-2;
开发环境:Vivado2019.1;
相机接口:开发板P3口,FPC软排线连接,相机可自由移动;
输入:IMX327摄像头–MIPI–4 Lane–RAW12-1920x1080;
输出:USB3.0,分辨率1920x1080;
应用:FPGA高端项目:IMX327 MIPI 视频解码 USB3.0 UVC 输出;
工程源码架构请参考第五章节的“FPGA逻辑设计工程源码架构”和“SDK软件工程源码架构”
工程的资源消耗和功耗同工程源码1一致;
8、工程移植说明
vivado版本不一致处理
1:如果你的vivado版本与本工程vivado版本一致,则直接打开工程;
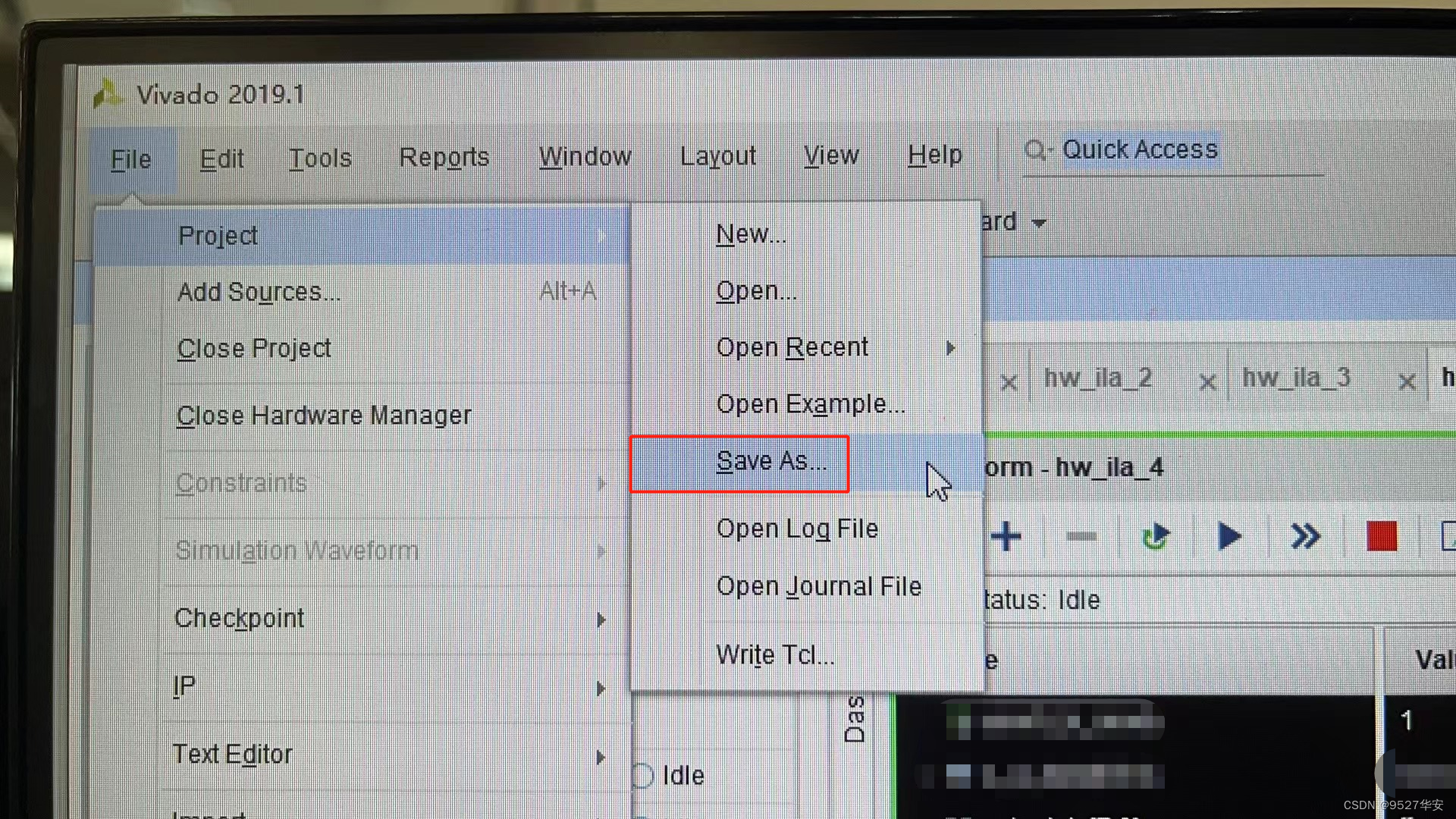
2:如果你的vivado版本低于本工程vivado版本,则需要打开工程后,点击文件–>另存为;但此方法并不保险,最保险的方法是将你的vivado版本升级到本工程vivado的版本或者更高版本;
3:如果你的vivado版本高于本工程vivado版本,解决如下:
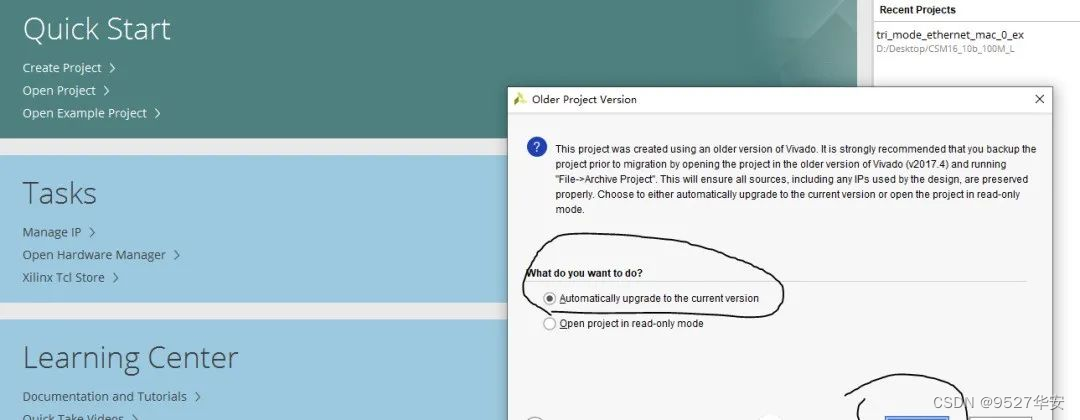
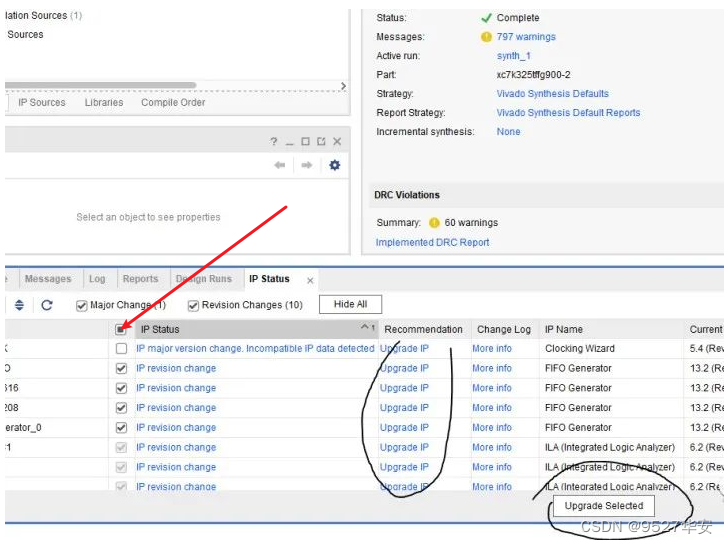
打开工程后会发现IP都被锁住了,如下:
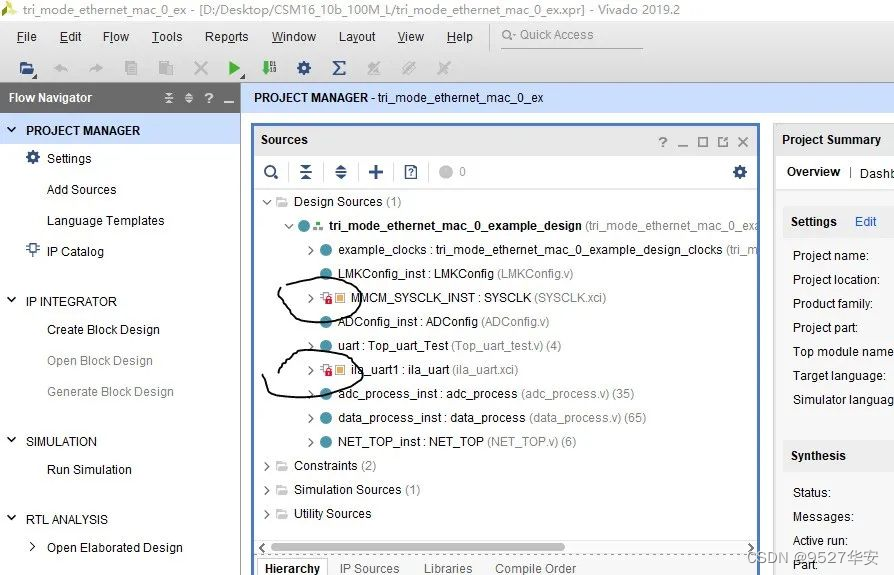
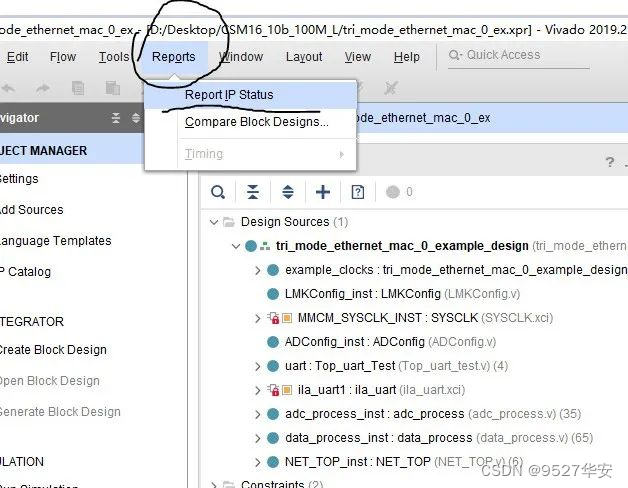
此时需要升级IP,操作如下:
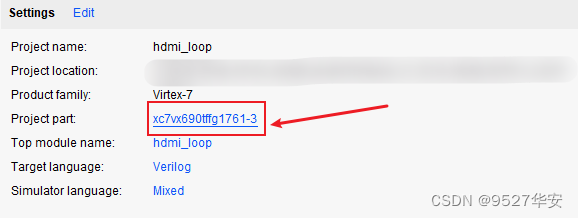
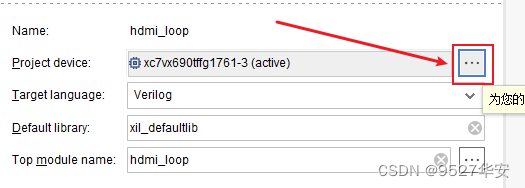
FPGA型号不一致处理
如果你的FPGA型号与我的不一致,则需要更改FPGA型号,操作如下:
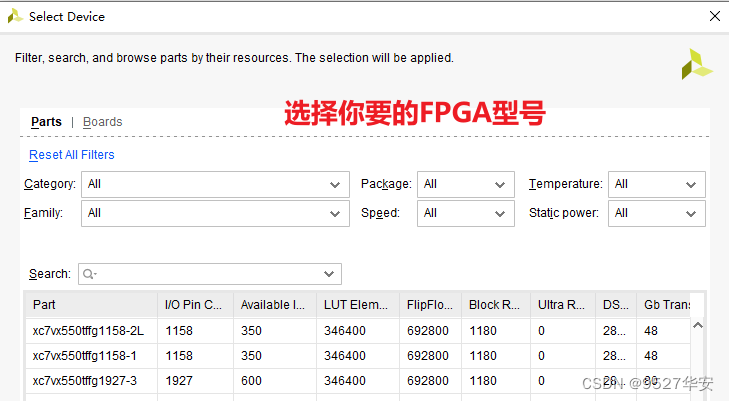
更改FPGA型号后还需要升级IP,升级IP的方法前面已经讲述了;
其他注意事项
1:由于每个板子的DDR不一定完全一样,所以MIG IP需要根据你自己的原理图进行配置,甚至可以直接删掉我这里原工程的MIG并重新添加IP,重新配置;
2:根据你自己的原理图修改引脚约束,在xdc文件中修改即可;
3:纯FPGA移植到Zynq需要在工程中添加zynq软核;
9、上板调试验证
准备工作
需要准备的器材如下:
本博提供的专用FPGA开发板;
本博提供的专用IMX327摄像头;
USB3.0连接线;
笔记本电脑;
图像输出演示
仅演示连接在P4口相机的图像输出,如下:
图像输出演示
注意!
注意!
注意!
1、USB线一定要是3.0的,区别方法是USB口内部的塑料件是蓝色的,对应的,电脑的USB口也必须是3.0的;
2、USB线与电脑连接,一定要是直连,不能有转接的HUB,也就是开发板与电脑USB口直连;
3、电脑操作系统一定要是Windows10;
4、打开电脑自带的摄像头软件后,一定要选择“EZ-Camera!”;
10、福利:工程代码的获取
福利:工程代码的获取
代码太大,无法邮箱发送,以某度网盘链接方式发送,
资料获取方式:私,或者文章末尾的V名片。
网盘资料如下:

















 1559
1559











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











