







一、伺服中的带宽
衡量伺服控制系统性能的主要指标系统精度、稳定性、响应特性、工作频率四大方面,特别在频带宽度和精度方面。频带宽度简称带宽,由系统频率响应特性来规定,反映伺服系统的跟踪的快速性。带宽越大,快速性越好。
大多数人都熟悉带宽,因为它与网络和WiFi服务有关——例如,WiFi信号传输的2.4 GHz和5 GHz频段。但带宽在伺服控制和调谐中也起着重要的作用。伺服控制系统的带宽表示系统对输入命令(位置、速度或转矩)变化的响应速度。系统中的每个控制环路都有自己的带宽,在级联控制环路中,最内层环路(电流控制)应该具有最高的带宽。下一个环路(速度控制)会有更低的带宽,在某些应用中,速度环路带宽可以比当前环路带宽低一个数量级。最外层环(位置控制)的带宽可以比速度环低一个数量级。

伺服系统使用控制回路来确定伺服驱动器应该向电机提供多少电流,以纠正命令值(位置,速度或扭矩)与实际值之间的任何错误。大多数先进的伺服系统使用三个控制回路:控制电流,控制速度,控制位置。
二、截止频率
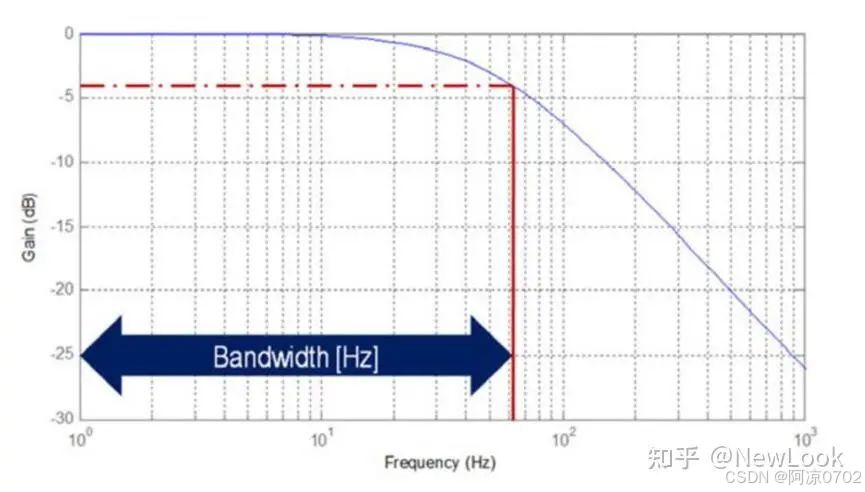
伺服系统带宽的定义是闭环幅度响应达到-3 dB时的频率。通常取输出幅值衰减为输入的0.707倍时的频率作为带宽,也叫-3dB带宽(20*log(0.707) = -3dB)。分贝用来衡量增益(放大倍数)的单位,是一个比值,没有量纲,-3dB实际上就是0.707倍,二者是一回事。
幅度响应是对输出信号的幅度与输入信号的幅度的度量。如果输出与输入完全匹配,则输出将具有与输入信号相同的幅度,换句话说,0 dB幅度增益。-3 dB振幅响应表示输出增益(输出与输入之比)等于其最大值的70.7%,相应地,传递给负载的功率等于输入功率的50%。
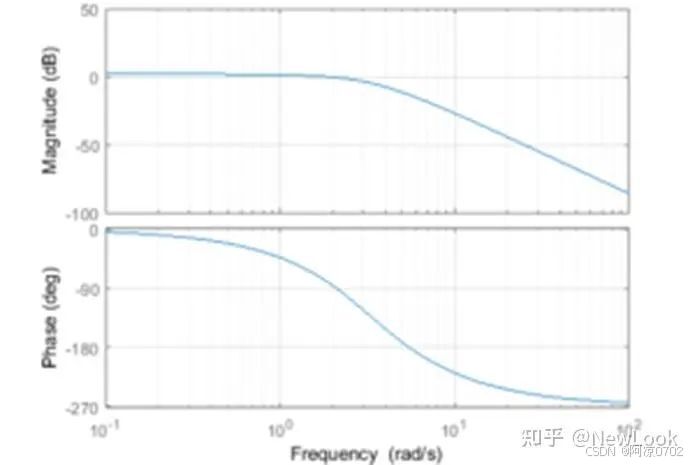
幅值响应和相位响应共同构成了伺服系统的频率响应。频率响应是衡量系统稳定性的关键指标,用伯德图表示。
一般来说,伺服控制的带宽越高,控制回路中可以设置的增益就越高。理论上,当系统具有最高的带宽和最高的控制环路增益时,可以实现最大的动态性能。
然而,高带宽意味着控制系统将迫使电机积极响应输入命令的变化。这意味着电机需要更快地加速并产生更大的力/扭矩,这两者都需要更大的功率,而这反过来又会产生热量。因此,电机的热特性,其散热或耐热的能力,是控制系统带宽的限制因素。伺服控制系统的带宽也会受到诸如负载、电机惯性比和系统顺应性等因素的限制,以及反馈装置的分辨率和控制回路的更新速率。
三、测量方式
1. 正弦法测量带宽:
驱动器输入正弦波转速指令,其幅值为额定转速指令的0.01倍,频率由1Hz逐渐升高,记录电动机对应的转速曲线。随着指令正弦频率的提高,电动机转速的波形曲线对指令正弦波曲线的相位滞后逐渐增大,而幅值逐渐减小。相位滞后增大至90度时的频率作为伺服系统90度相移的频带宽度;幅值减小至低频时0.707倍的频率作为伺服系统-3dB频带宽度。
2. 阶跃法测量带宽:
给定阶跃信号,后观察上升时间Tr。Tr与带宽fc: Tr=0.35/fc 。
上升时间定义:10%-90%所需要的时间。实验室中常用这种方法,其更为简单。
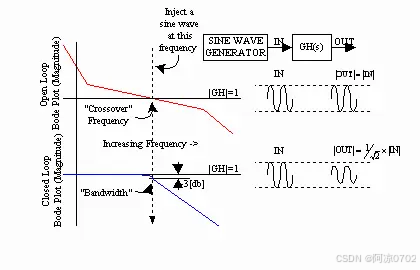
3. 理论分析法1测量带宽:
把系统的开环传递函数计算出,然后利用BODE图估测系统的开环穿越频率wc,其大小可以近似等于系统的带宽
万能成立的条件是 系统带宽fc:2*wc>=fc>=wc 。如图中所示:
4. 理论分析法2测量带宽:
把系统的闭环传递函数计算出,然后利用BODE图估测系统的闭环截止频率,其大小等于系统的带宽。
相关文章:

















 537
537

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









