







随着自动驾驶技术发展,自动驾驶仿真测试逐渐成为重要的环节,目前大家熟知的仿真软件有VTD、carla、carsim等等,其中各个软件有各自的应用特点。如:VTD特点为具有高保真度的环境模型,用户可以自定义传感器插件和车辆动力学插件,但其价格昂贵;carla为开源模拟器,支持脚本开发,但其占用硬盘空间较大,影响其广泛使用;carsim可以对车辆动力学参数进行修改,定制不同的动力学模型,但其应用范围较小。
今天拿到了panosim软件的试用权,使用体验很好,分享一下使用过程。
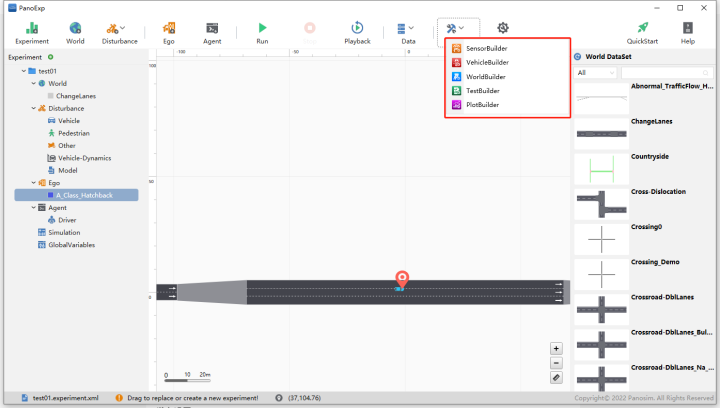
图1为panosim主页面,红框内为自带的tools,可以对路网和车辆属性进行编辑。panosim自带多种路网,包括十字路口、高速公路、匝道、T型路口等,可基本满足测试需求,也可以自己create或import路网,导入支持.osm/.xodr/net.xml格式,兼容性很强。
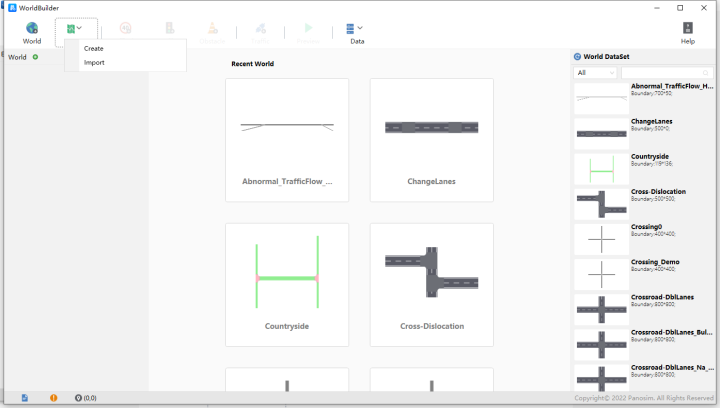
图2 worldbuilder界面
除此之外,可以对被测主车的sensor和dynamics进行自定义,也可以添加行人和非机动车模型,直接拖入即可,非常方便。如果有高级测试需求,可以通过disturbance接口自定义测试环境,导
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3373
3373

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









