







 本文介绍了如何使用Matlab的Simulink与m文件进行数据交互,以及如何搭建和设置传递函数。通过一个具体的PID控制优化案例,展示了如何运用改进的粒子群算法(PSO)进行在线参数整定,以改善系统的阶跃响应。文中提供了详细的m文件代码和Simulink模型搭建步骤,并给出了优化过程的输出结果,包括参数变化曲线和性能指标。
本文介绍了如何使用Matlab的Simulink与m文件进行数据交互,以及如何搭建和设置传递函数。通过一个具体的PID控制优化案例,展示了如何运用改进的粒子群算法(PSO)进行在线参数整定,以改善系统的阶跃响应。文中提供了详细的m文件代码和Simulink模型搭建步骤,并给出了优化过程的输出结果,包括参数变化曲线和性能指标。
阅读须知:
1.参考文献:张继荣,张天.基于改进粒子群算法的PID控制参数优化[J].计算机工程与设计,2020,41(04):1035-1040.
2.其中仿真模型与算法均按照文中所搭建与设置。
1.学习目标:
1.掌握Simulink与m文件的数据交互;
2.传递函数的表达形式,m文件编写与Simulink文件;
3.运用算法进行Simulink仿真优化的在线参数整定。
2.学习内容:
1、 两种数据交互的形式----Simulink仿真与m文件
**第一种是:**在这里可以运用assignin命令将参数赋予到基础工作区,并运用sim命令驱动Simulink文件进行在线仿真运行。
function z=PSO_PID(x)
assignin('base','Kp',x(1)); %将值 x(1) 赋予MATLAB 基础工作区中的变量 Kp
assignin('base','Ki',x(2));
assignin('base','Kd',x(3));
[t_time,x_state,y_out]=sim('PID_Model',[0,20]); %% [0,20] 系统仿真的时间范围(起始至终止时间)
% t_time 返回系统仿真的时间向量
% x_state 返回系统仿真的状态变量矩阵
% y_out 返回系统仿真的输出矩阵
z=y_out(end,1);
**第二种是:**通过在Simulink文件中设置 “To Workspace”模块,如下所示,并设置所输出的变量名和类型,可选择矩阵序列或者带时间的数据包等。
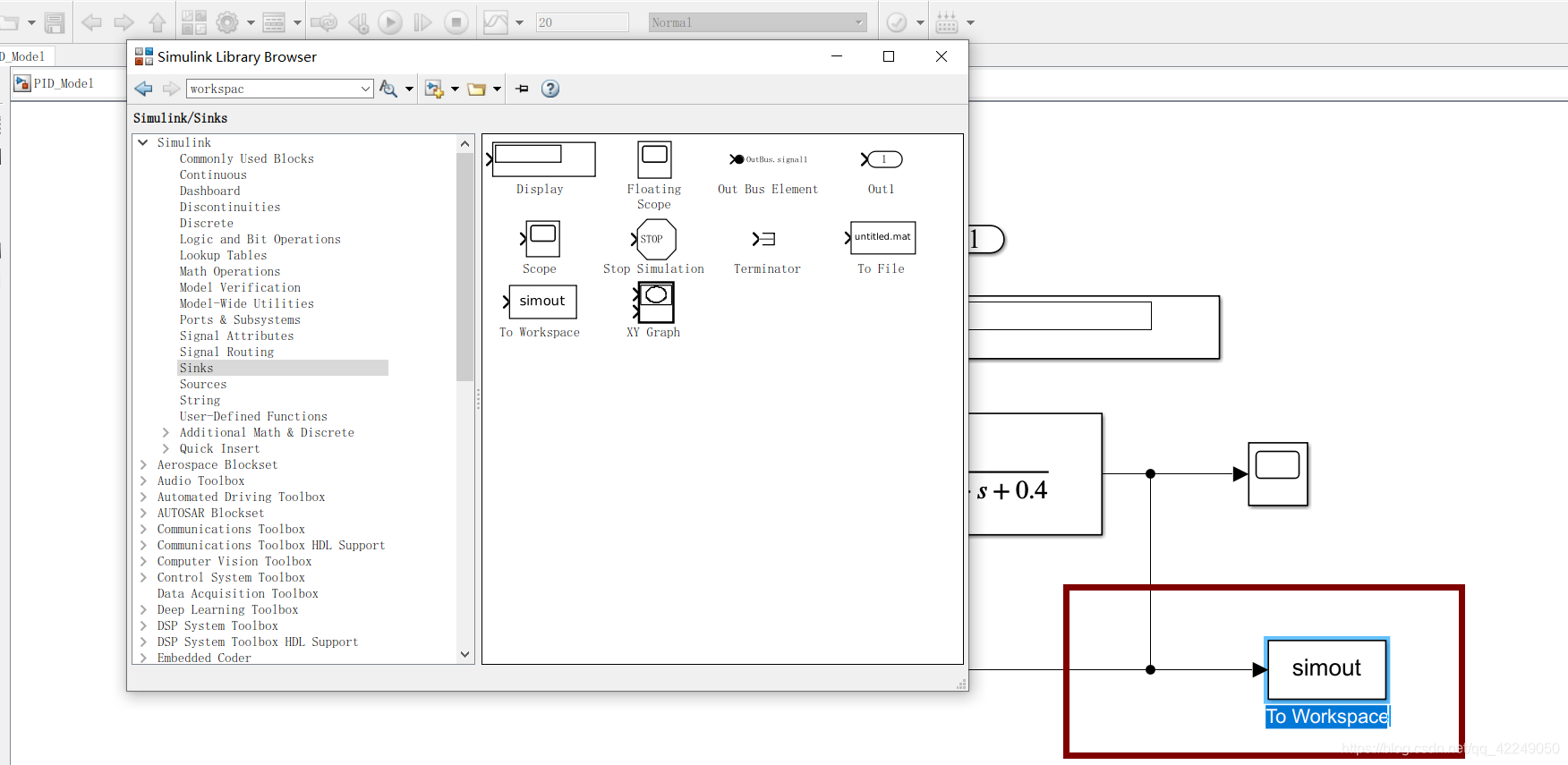
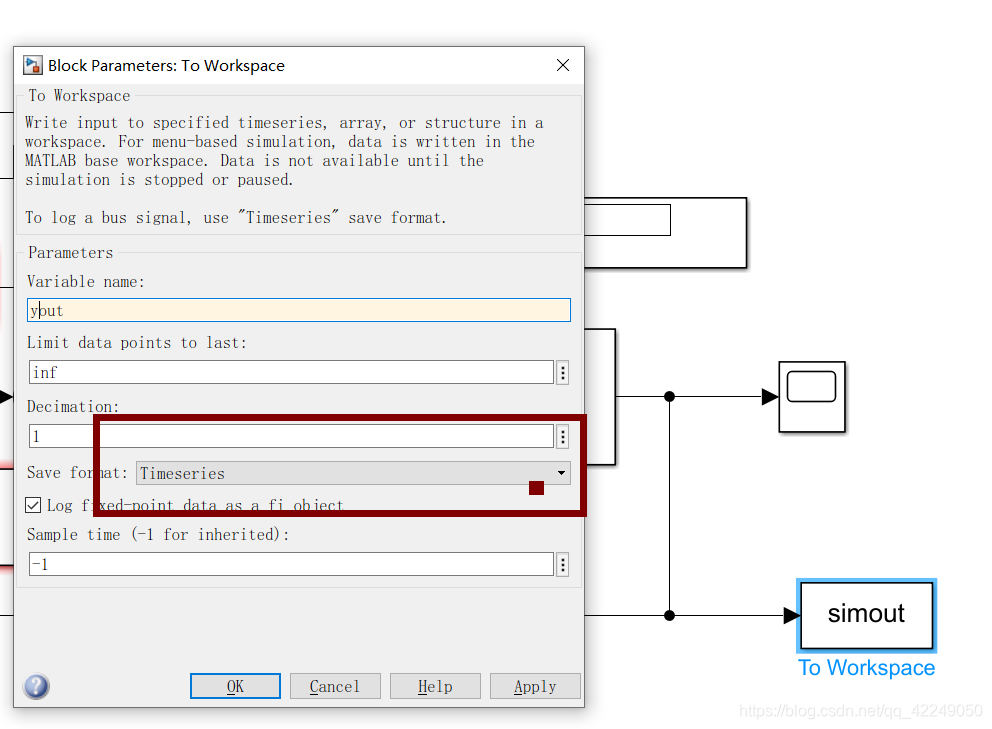
设置如下:
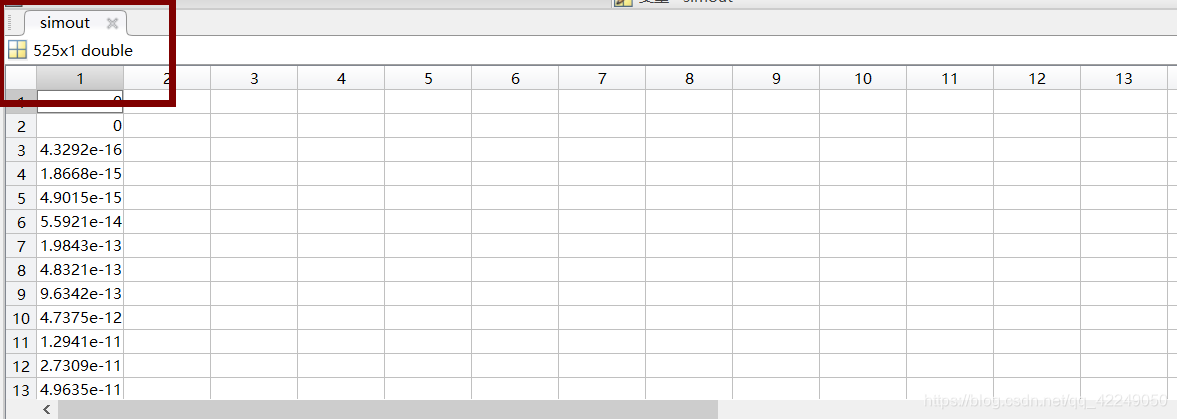
运行结果如下:
2、 传递函数的表达形式,m文件编写与Simulink文件

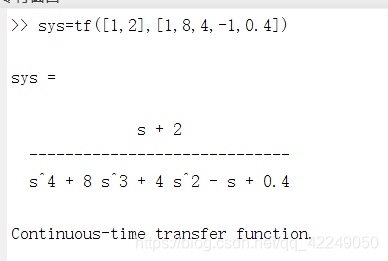
第一种、m文件编写,如下:
sys=tf([1,2],[1,8,4,-1,0.4]);
依据差分方程与Z变换,将上述连续频域下的传递函数继续离散化,可得如下:
clc;
%% 定义传递函数
ts=0.01;
sys=tf([1,2],[1,8,4,-1,0.4]); %%
dsys=c2d(sys,ts,'z');
[num,den]=tfdata(dsys,'v');
rin=1.0;
u_1=0.0;u_2=0.0;
y_1=0.0;y_2=0.0;
x=[0,0,0]';
error_1=0;
P=1000;
%% 定义PID控制参数
Kpidi(1) = 200;%0-30
Kpidi(2) = 0;%0-1
Kpidi(3) = 100;%0-1
for k=1:1:P
timef(k)=k*ts;
r(k)=rin;
u(k)=Kpidi(1)*x(1)+Kpidi(2)*x(2)+Kpidi(3)*x(3);
if u(k)>=10
u(k)=10;
end
if u(k)<=-10
u(k)=-10;
end
yout(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;
error(k)=r(k)-yout(k);
%------------ Return of PID parameters -------------
u_2=u_1;u_1=u(k);
y_2=y_1;y_1=yout(k);
x(1)=error(k); % Calculating P
x(2)=(error(k)-error_1)/ts; % Calculating D
x(3)=x(3)+error(k)*ts; % Calculating I
error_2=error_1;
error_1=error(k);
end
%% 计算各指标性能
delt_err = 2e-2;%稳态调整精度,上下允许的偏差
M=size(yout,1); %M=1,N=1000
N=size(yout,2); %M为运算维度,N为时间序列长度
N1=(round(N*0.618));
f_infty=mean(yout(:,N1:N));%稳态值序列,取最终末尾的数据平均值
err=yout-f_infty*ones(1,N);%通过稳态值计算误差序列,稳态偏差数组
effect_err = roundn(mean(err(:,N1:N)),-8); %%行列颠倒了很可能就是这个原因
ferr=fliplr(abs(err)); %倒序并取绝对值
[~,ts_i]=max(ferr>delt_err*f_infty,[],2); %误差绝对值倒序
% M = max(A,[],dim) 返回维度 dim 上的最大元素。例如,如果 A 为矩阵,则 max(A,[],2) 是包含每一行的最大值的列向量
ts_i=N*ones(M,1)-ts_i;
Ts=ts_i*ts;%调节时间
[fp,tp]=max(yout,[],2);%峰值和函数峰值
tp=tp*ts;
tp(abs(fp-f_infty)<1e-5)=NaN; %过阻尼无超调,没有峰值时间
sigma=(fp-f_infty)./f_infty;
if M==1 %非调试模式下不显示
disp(['系统稳态值为',num2str(f_infty)])
disp(['系统稳态误差为',num2str(effect_err),' r/min'])
disp(['系统超调量为',num2str(sigma*100),' %'])
if isnan(tp)
disp('系统不存在峰值时间')
else
disp(['系统峰值时间为',num2str(tp),' s'])
end
disp(['系统的调节时间为',num2str(ts),' s'])
end
%% 转速阶跃上升的绘图
clf;
figure(1);
plot(timef,rin,'r',timef,yout,'b');
yout';
xlabel('Time(s)');ylabel('rin,yout');
运行结果如下:
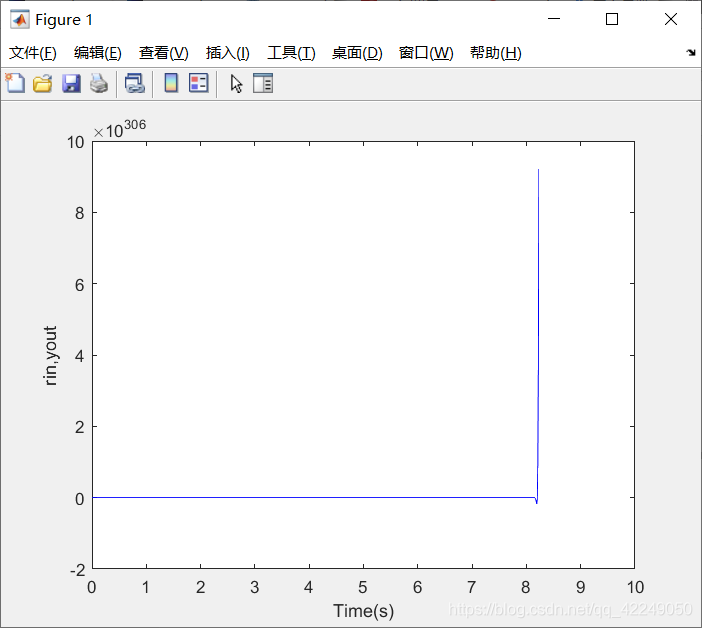
由上可知,三个参数kp、ki和kd未整定,从而导致系统的阶跃响应输出不是有限稳定的,为此,运用优化算法来进行整定。
第二种:Simulink文件搭建,如下:
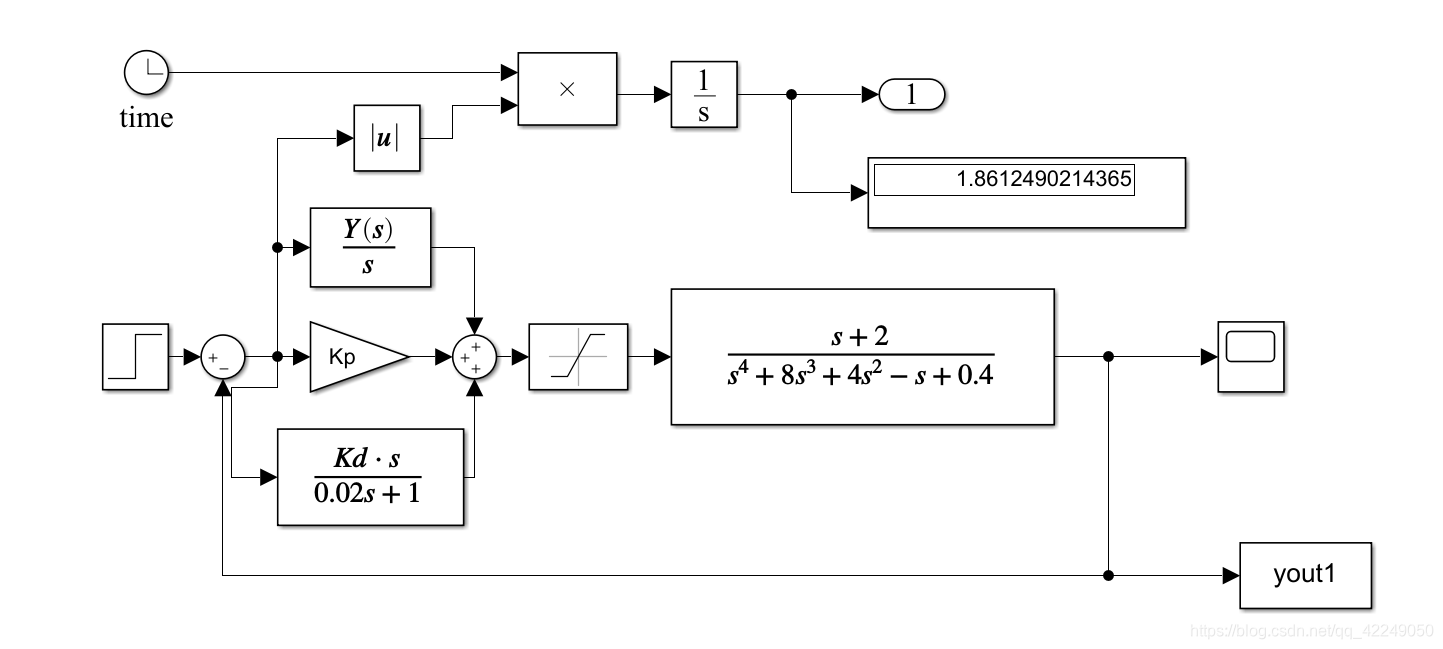
3. 运用算法进行Simulink仿真优化的在线参数整定
采取的适应度是ITAE,运用PSO优化算法,读者可自行尝试其他的优化算法。或者私我,诸如遗传算法、简单的优化算法和多目标遗传算法等博主均已实现。
主函数 PSO
%% 清空环境
close all;
clear;
clc;
tic;
%% 参数设置
w = 0.6; % 惯性因子 ---可设置为变化的
c1 = 2; % 加速常数
c2 = 2; % 加速常数
Dim = 3; % 维数
SwarmSize = 5; % 粒子群规模
ObjFun = @PSO_PID; % 待优化函数句柄
MaxIter = 10; % 最大迭代次数
MinFit = 0.1; % 最小适应值
Vmax = 1;
Vmin = -1;
Lb = [0 0 0];
Ub = [300 300 300];
%% 粒子群初始化
Range = ones(SwarmSize,1)*(Ub-Lb);
Swarm = rand(SwarmSize,Dim).*Range + ones(SwarmSize,1)*Lb; % 初始化粒子群
VStep = rand(SwarmSize,Dim)*(Vmax-Vmin) + Vmin; % 初始化速度
fSwarm = zeros(SwarmSize,1);
for i=1:SwarmSize
fSwarm(i,:) = feval(ObjFun,Swarm(i,:)); % 粒子群的适应值
end
%% 个体极值和群体极值
[bestf bestindex]=min(fSwarm);
zbest=Swarm(bestindex,:); % 全局最佳
gbest=Swarm; % 个体最佳
fgbest=fSwarm; % 个体最佳适应值
fzbest=bestf; % 全局最佳适应值
%% 迭代寻优
iter = 0;
y_fitness = zeros(1,MaxIter); % 预先产生4个空矩阵
K_p = zeros(1,MaxIter); %% MaxIter 最大迭代次数
K_i = zeros(1,MaxIter);
K_d = zeros(1,MaxIter);
while( (iter < MaxIter) && (fzbest > MinFit) )
for j=1:SwarmSize
% 速度更新
VStep(j,:) = w*VStep(j,:) + c1*rand*(gbest(j,:) - Swarm(j,:)) + c2*rand*(zbest - Swarm(j,:));
if VStep(j,:)>Vmax, VStep(j,:)=Vmax; end
if VStep(j,:)<Vmin, VStep(j,:)=Vmin; end
% 位置更新
Swarm(j,:)=Swarm(j,:)+VStep(j,:);
for k=1:Dim
if Swarm(j,k)>Ub(k), Swarm(j,k)=Ub(k); end
if Swarm(j,k)<Lb(k), Swarm(j,k)=Lb(k); end
end
% 适应值
fSwarm(j,:) = feval(ObjFun,Swarm(j,:));
% 个体最优更新
if fSwarm(j) < fgbest(j)
gbest(j,:) = Swarm(j,:);
fgbest(j) = fSwarm(j);
end
% 群体最优更新
if fSwarm(j) < fzbest
zbest = Swarm(j,:);
fzbest = fSwarm(j);
end
end
iter = iter+1; % 迭代次数更新
y_fitness(1,iter) = fzbest; % 为绘图做准备
K_p(1,iter) = zbest(1);
K_i(1,iter) = zbest(2);
K_d(1,iter) = zbest(3);
end
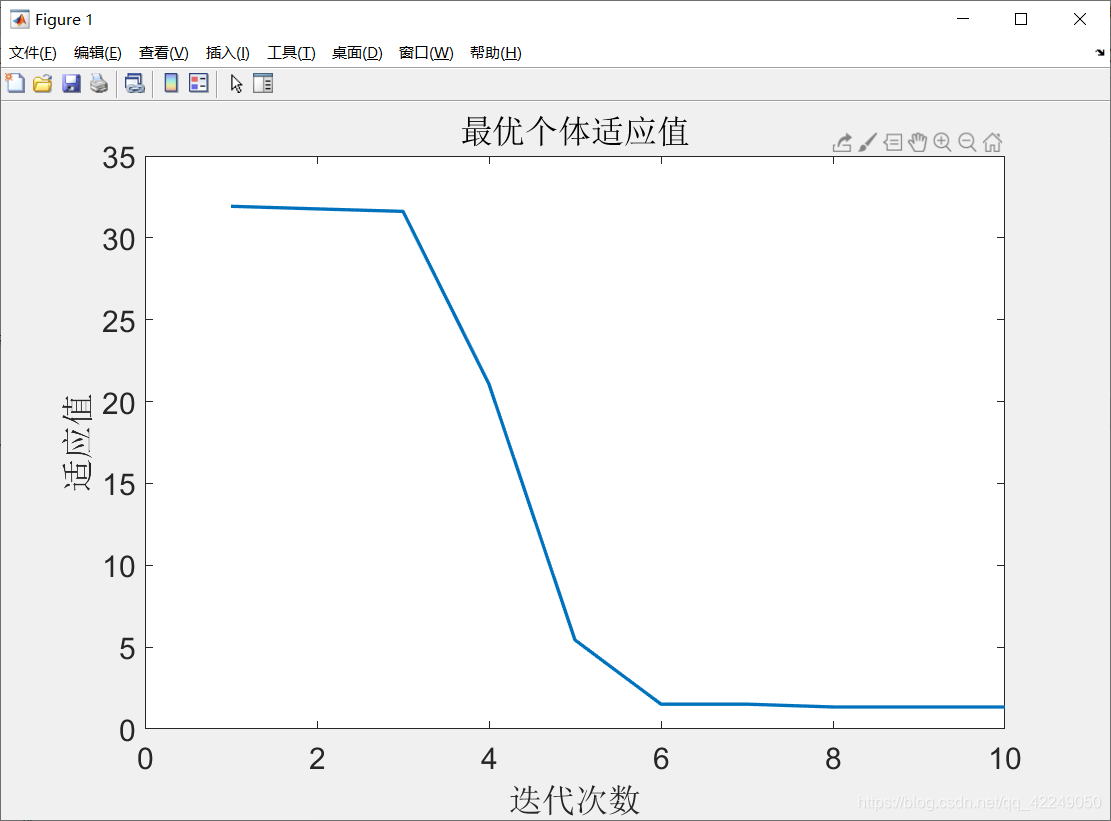
%% 绘图输出
clf;
figure(1) % 绘制性能指标ITAE的变化曲线
plot(y_fitness,'LineWidth',2)
title('最优个体适应值','fontsize',18);
xlabel('迭代次数','fontsize',18);
ylabel('适应值','fontsize',18);
set(gca,'Fontsize',18);
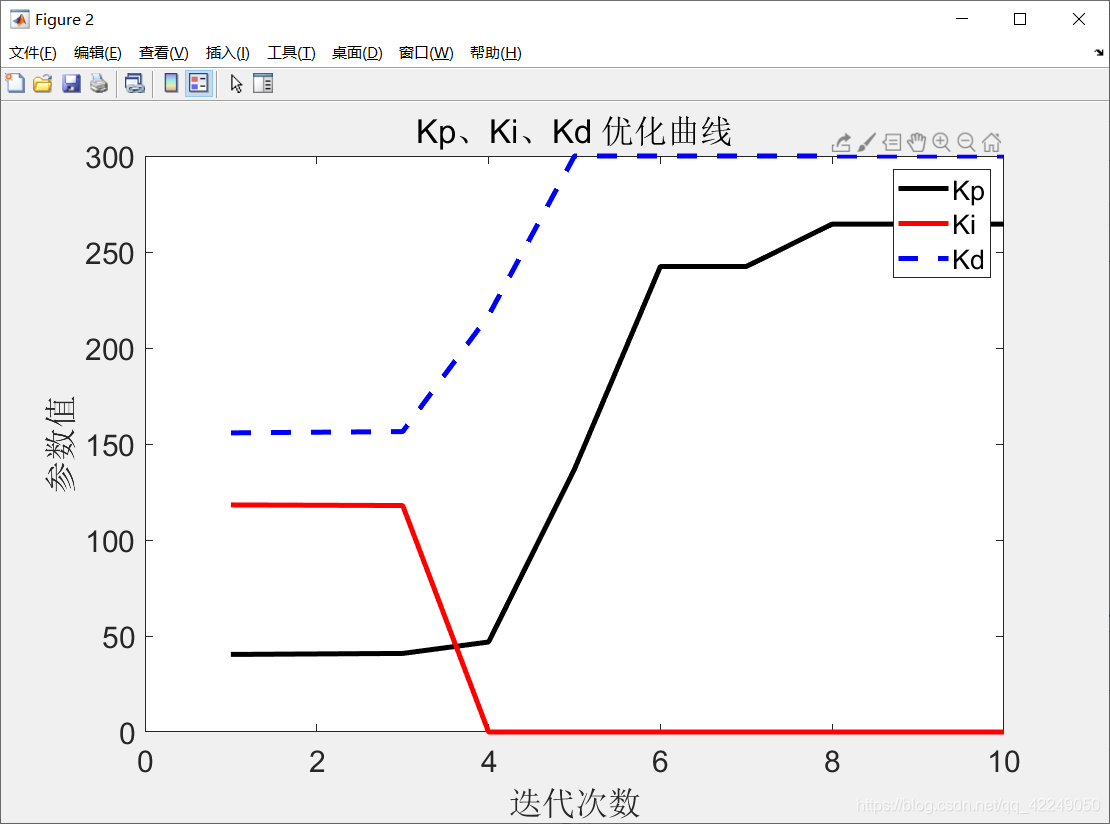
figure(2) % 绘制PID控制器参数变化曲线
plot(K_p,'k','LineWidth',3);
hold on
plot(K_i,'r','LineWidth',3);
hold on
plot(K_d,'--b','LineWidth',3);
title('Kp、Ki、Kd 优化曲线','fontsize',18);
xlabel('迭代次数','Fontsize',18);
ylabel('参数值','Fontsize',18);
set(gca,'Fontsize',18);
legend('Kp','Ki','Kd');
toc;
驱动Simulink模型的子函数,PSOPID
function z=PSO_PID(x)
assignin('base','Kp',x(1)); %将值 x(1) 赋予MATLAB 基础工作区中的变量 Kp
assignin('base','Ki',x(2));
assignin('base','Kd',x(3));
[t_time,x_state,y_out]=sim('PID_Model',[0,20]); %% [0,20] 系统仿真的时间范围(起始至终止时间)
% t_time 返回系统仿真的时间向量
% x_state 返回系统仿真的状态变量矩阵
% y_out 返回系统仿真的输出矩阵
z=y_out(end,1);
...
运行结果如下:
3.学习产出:
提示:这里统计学习计划的总量
1、 笔记 1 遍
2、CSDN 技术博客 1 篇
3、可运行的代码,基于博主的代码可自行搭建并改进PSO。


















 739
739

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











