








激光雷达传感器
1.激光雷达:
- 激光雷达由四部分构成
- 激光器:激光器是激光雷达中的激光发射机构。在工作过程中,它会以脉冲的方式点亮
- 接收器:激光器发射的激光照射到障碍物以后,通过障碍物的反射,反射光线会经由镜头组汇聚到接收器上
- 信号处理单元:信号处理单元负责控制激光器的发射,以及接收器收到的信号的处理。根据这些信息计算出目标物体的距离信息。
- 旋转机构:以上3个组件构成了测量的核心部件。旋转机构负责将上述核心部件以稳定的转速旋转起来,从而实现对所在平面的扫描,并产生实时的平面图信息。
- 测距原理
-
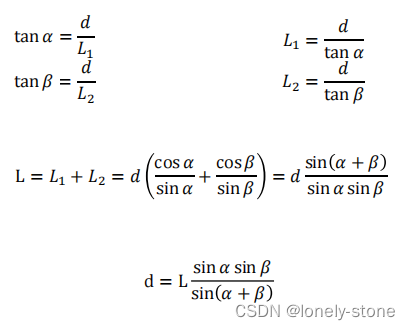
三角测距:主要是A2,EAI这种小于10m的
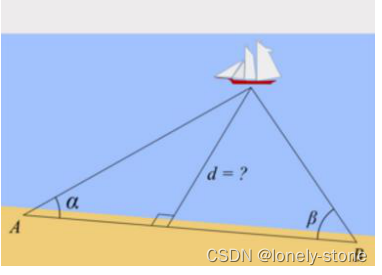
- 计算过程:
-
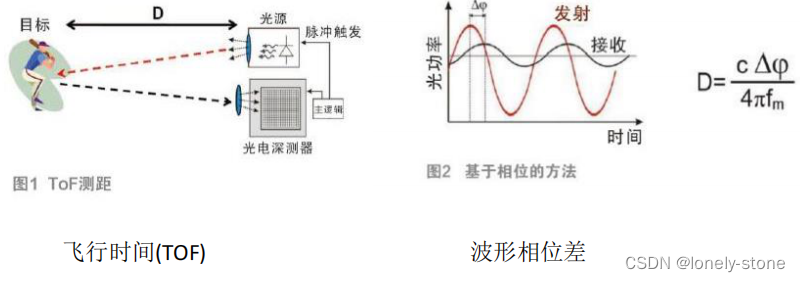
TOF 测距:速度乘以飞行时间
-
各自特点:
- 三角测距:中近距离精度较高(误差1%左右)、价格便宜、远距离精度较差、易受干扰、一般在室内使用。
- TOF:测距范围广,测距精度高,抗干扰能力强,价格贵,室内室外皆可
-
2.激光雷达数学模型
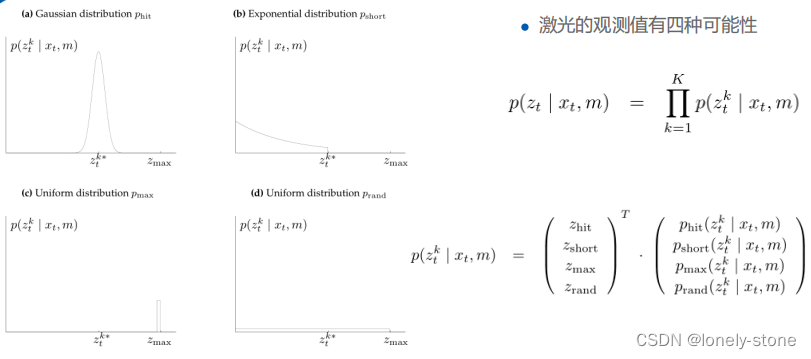
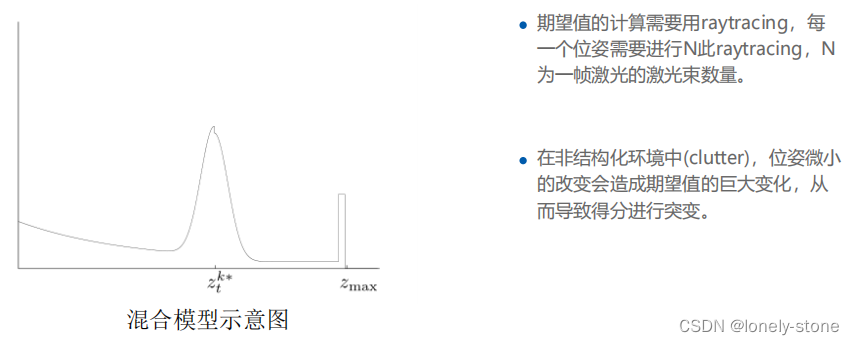
- 光束模型
- 模型图:
- 缺点:
- 模型图:
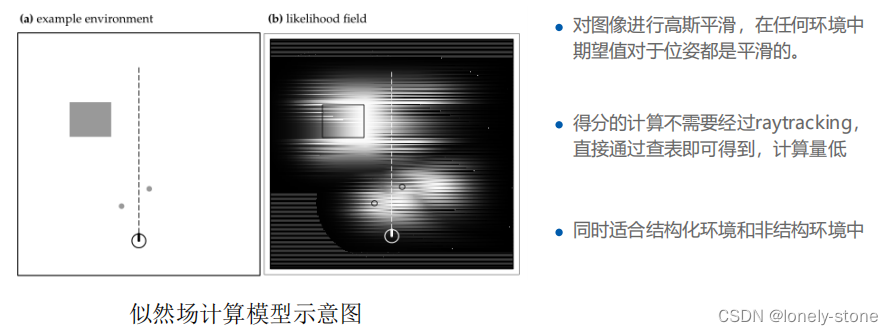
- 似然场模型(likelihood model)
3.运动畸变
- 示意图:
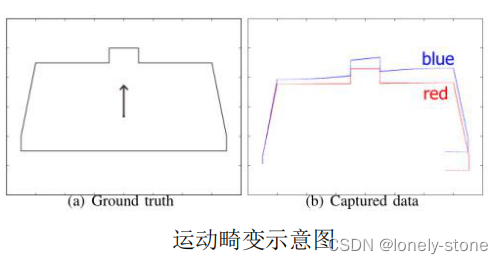
- 产生原因:
- 激光点数据不是瞬时获得
- 激光测量时伴着机器人的运动
- 激光帧率较低时,机器人的运动不能忽略
畸变去除(目的就是要得到每帧的更为准确的位姿)
1.纯估计方法
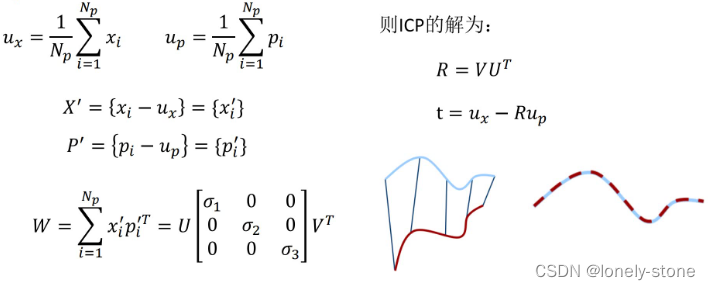
方法一:ICP方法
-
目的:进行两个点云的配准,如给定两个点云集合,其中 x i 与 p i x{_i}与p{_i} xi与pi匹配,则有数学表示(求解一个欧式变换(R,t))
-

-
已知对应点的求解:步骤是1首先求平均位置,2去中心化,3构造矩阵并进行SVD分解
-
未知对应点的求解(对应点就是EM的隐变量)
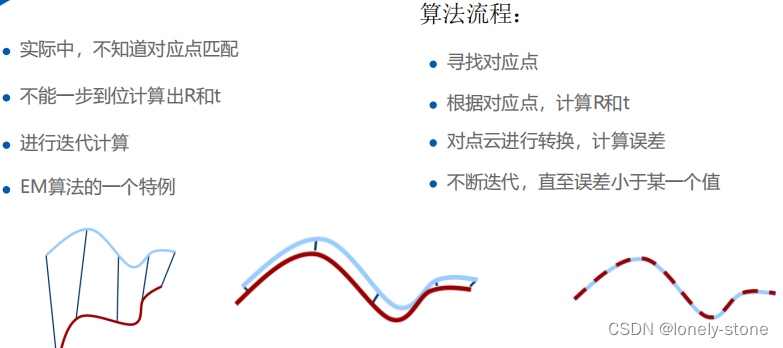
-
ICP方法在激光匹配中间那个的缺点:没有考虑激光的运动畸变;如果当前的激光匹配数据是错误的。
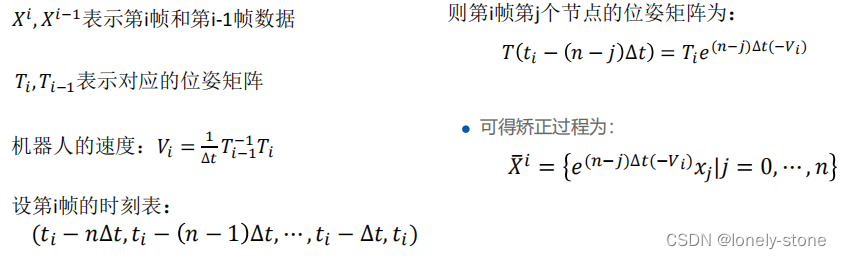
方法二:VICP方法
- 特点:ICP算法的变种,考虑了机器人的运动并且假设为匀速运动,进行匹配的同时估计机器人的速度。
- 介绍:
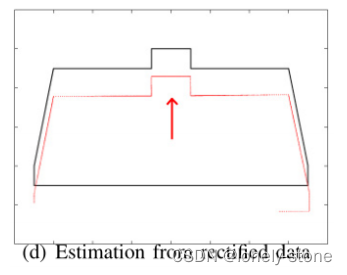
- VICP矫正效果:
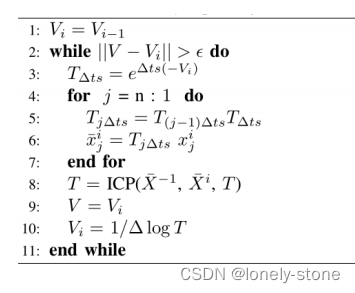
- 算法流程:
2.里程计辅助方法
- 前瞻
- VICP缺点:
- 对于低帧率激光(5HZ),匀速运动假设不成立
- 数据预处理和状态估计过程耦合
- 解决办法:
- 尽可能准确的反应运动情况,
- 实现预处理和状态估计的解耦
- 传感器辅助方法(Odom/IMU)
- 极高的位姿更新频率(200HZ),可以比较准确的反应运动情况
- 较高精度的局部位位姿估计
- 跟状态估计完全解耦
- VICP缺点:
- IMU辅助:好处是可以直接测量角速度和线加速度、具有较高的角速度测量精度、测量频率较高(1kHz~8kHz),但是线加速度精度太差,二次积分在局部的精度依然很差(就是时间太短达不到那么高的时间精度)
- 轮式里程计:能直接测量机器人的位移和角度(核心),具有较高的局部角度和位置测量精度,更新速度较高(100Hz~200Hz)

- 问题模型:
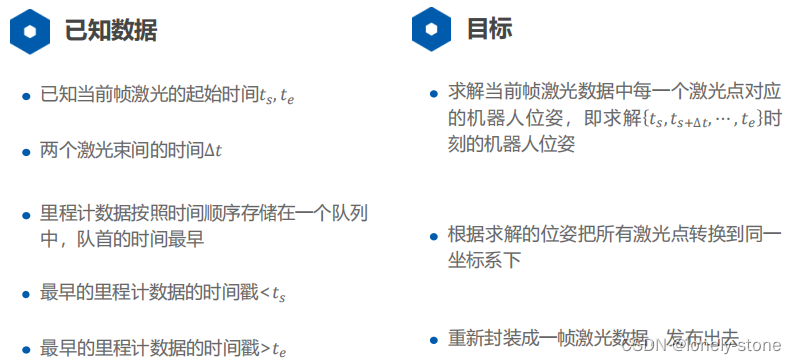
- 求解过程:
- a.线性插值方法(假设是匀速运动):
- 若里程计队列数据正好和激光数据同步,假设第i帧和第j帧数据时刻分别是 t s 和 t e t{_s}和t{_e} ts和te,则 p s = OdomList [ i ] p e = OdomList [ j ] \begin{array}{l} p_{s}=\text { OdomList }[i] \\ p_{e}=\text { OdomList }[j] \end{array} ps= OdomList [i]pe= OdomList [j]
- 若不同步(即没有 t s t{_s} ts时刻对应的里程计位姿),则需要进行线性插值,设在l,k时刻有里程计位姿,且l<s<k,则: p l = OdomList [ l ] p k = OdomList [ k ] p s = LinarInterp ( p l , p k , s − l k − l ) \begin{array}{l} p_{l}=\text { OdomList }[l] \\ p_{k}=\text { OdomList }[k] \\ p_{s}=\operatorname{LinarInterp}\left(p_{l}, p_{k}, \frac{s-l}{k-l}\right) \end{array} pl= OdomList [l]pk= OdomList [k]ps=LinarInterp(pl,pk,k−ls−l)
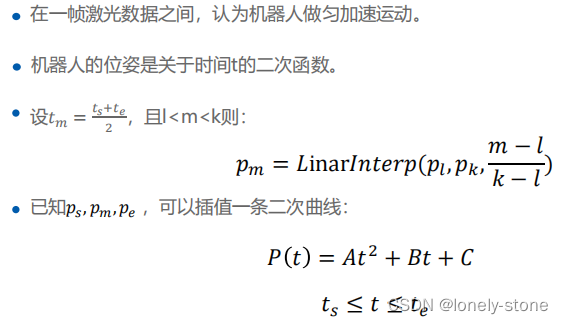
- b.二次插值(假设是匀加速运动):
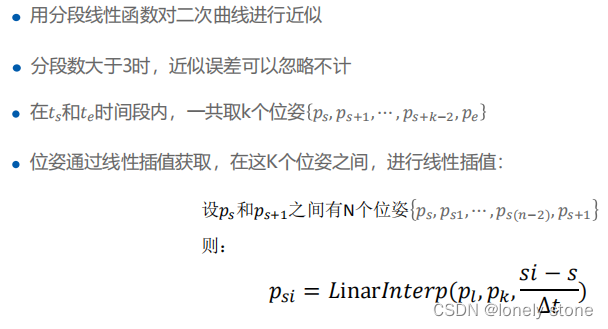
- c.用分段线性函数对方法二中的二次曲线进行近似来求解
- 统一坐标系&激光数据发布

- a.线性插值方法(假设是匀速运动):
实现一个激光雷达运动畸变去除模块
















 2070
2070











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









