






卷首语
同时,由于项目包含不同专业、不同类型的活动,需通过建立科学的测量体系以将底层活动的进度逐层汇总从而获得项目总体进度数据。
S曲线
S形曲线,是指在以时间为横坐标,以进度或成本指标为纵坐标的坐标图中的一条表示项目累计完成工作量或资源消耗量的曲线。由于项目一般在初期投入资源较少,中期投入最多,后期逐渐减少,导致项目进度成本随时间变化的曲线呈S形,故得其名。
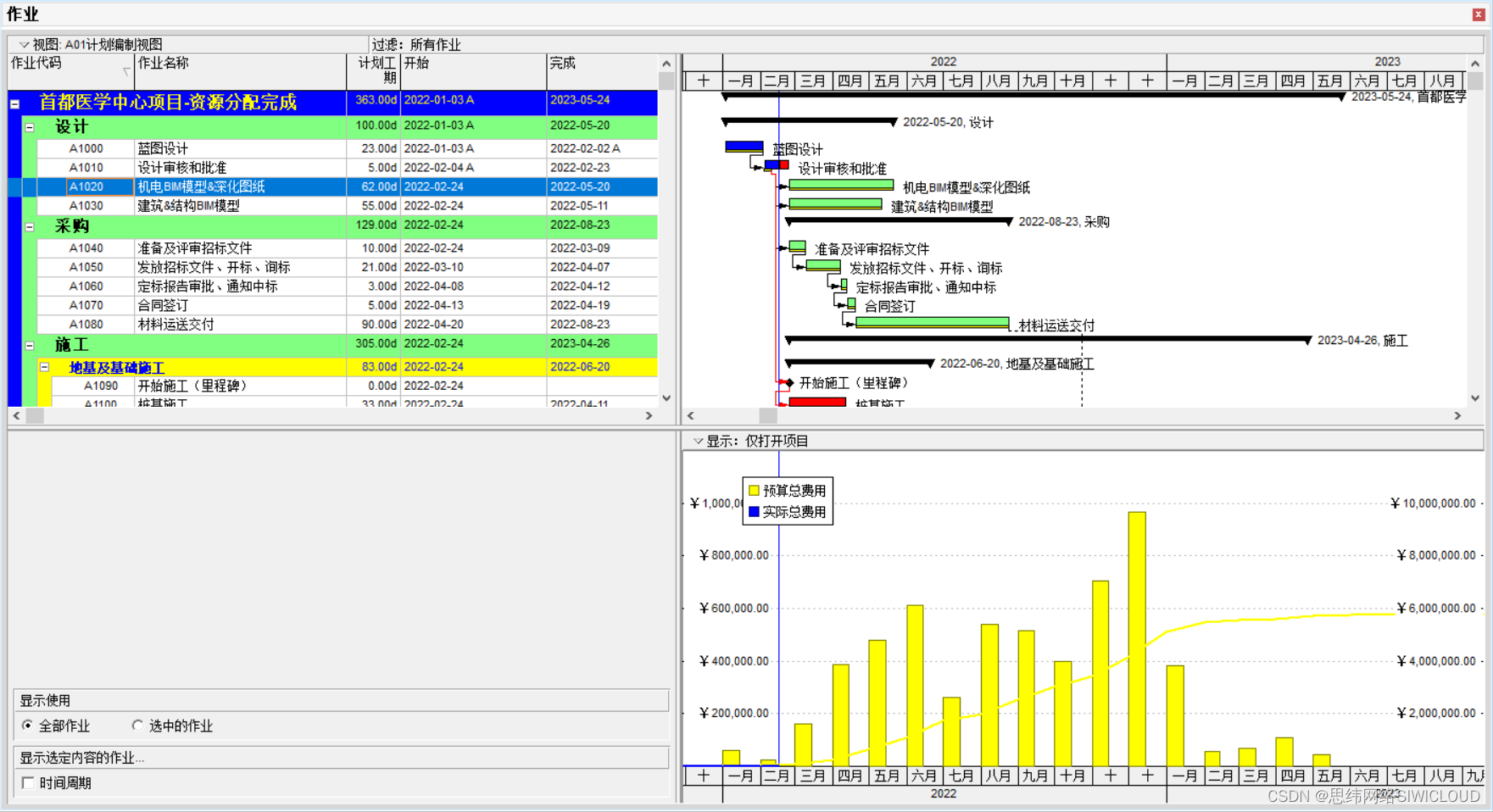
S形曲线比较法,是指通过将实际进展“S”曲线与目标计划“S”曲线进行对比,从而直观掌握项目实际进展情况。对于进度管理而言,“S”曲线的使用的进度指标包括人工时、工程量、进度百分比等。同时,由于项目包含不同专业、不同类型的活动,需通过建立科学的测量体系以将底层活动的进度逐层汇总从而获得项目总体进度数据。“S”曲线比较法的基本步骤如下:
1确定目标计划
2确定“S”曲线使用的进度指标。
3建立进度测量体系。
4根据目标计划计算并绘制目标计划“S”曲线。
5根据收集的实际进展绘制实际进展“S”曲线。
6对比两条曲线,获得对项目实际进度与计划进度的偏离情况。
目标计划“S”曲线与实际进展“S”曲线的对比。

香蕉型曲线比较法
香蕉形曲线,是由两条S形曲线组合而成的曲线。这两条曲线分别是以目标计划中各项活动的最早开始时间和最晚开始时间为基准进行计算,并以计算结果绘制得到的,即ES(Early Start)曲线和LS(Late Start)曲线。对同一个项目,ES曲线和LS曲线的起止时间分别相同,即两条S形曲线收尾闭合,图形形似橡胶,故称香蕉形曲线。

















 4087
4087

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









