








一. 感知概述
1. 融合了摄像头、radar、lidar各自的轨迹,来获得最终的轨迹列表;
2. 障碍物子模块对障碍物进行检测、分类、跟踪,预测障碍物的运动和位置信息(航向、速度 );
3. 项目地址:

二. 感知框架

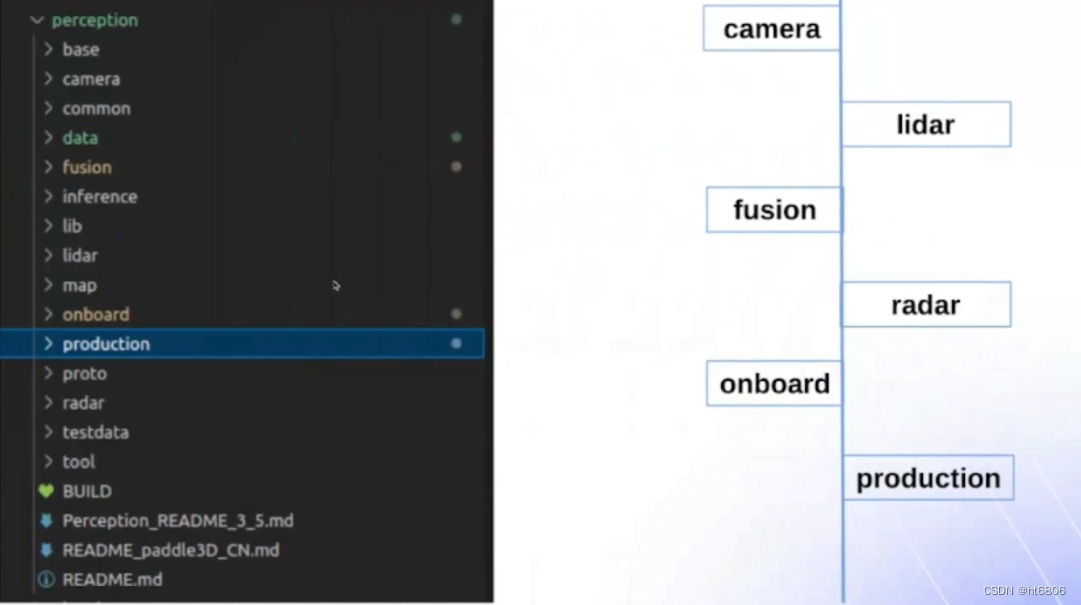
三. 感知代码结构
主要模块:camera、lidar、 fusion、radar、production;
1. camera:[app] 车道线、红绿灯、障碍物等检测;
2. lidar: [app] 障碍物检测、跟踪;
3. fusion: [app] 融合
4. radar: [app] 障碍物检测
5. product:[component] 对lidar、相机的调用,封装成一个一个的component;
感知模块的代码从此开始
四. onboard & production模块
1. onboard目录:
主要的目标为componet,对lidar、相机功能的调用,并封装成一个component感知模块的入
口,看代码从这里开始!
2. production目录
① dag文件 最重要的是知道如何启动某个模块: mainboard -d 路径/.dag
如下图,有启动感知模块的dag文件、只启动lidar检测的文件等!
② conf文件
perception > lidar >
perception > lidar > modules >
③ data文件

五. dag文件
1.
2. 启动文件
六. Detection Component


七. Lidar检测算法
1. 体素化点云,获取伪图片
2. 卷积处理
3. 匹配过程



八. Lidar Tracker代码结构

九. 感知模块的启动【数据下载】
1. dag文件启动:mainboard -d /path/ **.dag
2. launch文件启动:cyberlaunch start /path/**.launch
3. 本地使用① 启动环境

② 播放数据、下载数据
③ lidar感知模块的启动
④ 交通灯检测模块启动





















 356
356











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









