







轻型电动汽车一般采用直驱的方式作为驱动方式,即不经过变速箱进行速比的调节,电机输出轴直接经过主减速器将动力传输至车轮。换挡器的换挡方式一般为VCU接收档位器的换挡请求后,根据整车当前状态判断换挡状态,最后输出当前档位状态,然后VCU根据档位状态发送正向扭矩指令或者反向扭矩指令或者零扭矩给电机控制器执行,以控制车辆按照驾驶员意图行车。本文介绍电动汽车一般换挡控制策略及Simulink建模方式。
目录
一、电动汽车换挡控制原理
1、档位器分为D、N、R挡,当档位器处于不同档位时,输出相应的硬线信号或者CAN信号给VCU
2、VCU接收到档位器的换挡请求信号后,根据当前钥匙状态、高压状态、车速状态、故障状态等综合判断是否响应换挡器的换挡请求
3、将最终的档位状态输出,作为扭矩控制的条件,作为扭矩指令的正向、反向或零扭矩的依据
二、电动汽车换挡控制策略
1、静态换挡
车辆停止状态(-3km/h≤v≤3km/h,可标定),当同时满足车辆Ready且制动有效且收到D挡或R挡换挡请求信号时,响应换挡请求切换为D挡或R挡;当Ready信号丢失或接收到档位请求信号为N时,切换为N挡
2、动态换挡
车辆处于行车状态,为防止误触换挡器回到N挡后需重新挂D挡,当车速>10km/h,允许N档不踩刹车切换到 D 档。
三、电动汽车换挡控制Simulink建模
1、输入信号
KeyON_Sw:钥匙ON挡信号
BPSw_St:制动开关信号
PhyGear_St:物理档位信号,即换挡器所处档位的状态对应的信号
Ready_St:车辆Ready状态
VehSpd_kph:车辆当前车速
2、输出信号
ActGear_St:实际档位状态,即经过对当前条件综合判断后的档位状态
3、控制逻辑
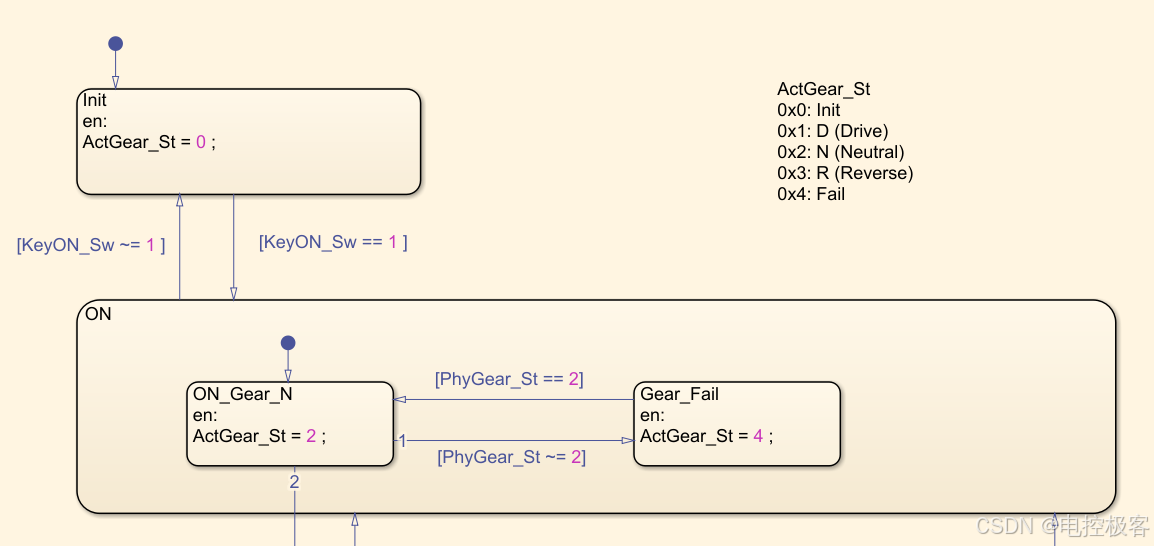
1)VCU唤醒后对档位控制模块进行初始化,档位状态为0x0:init
2)接收到钥匙ON挡信号后,进入ON挡状态,根据采集的物理档位信号判断档位器是否有故障,如果有故障,则判定实际档位为0x4:故障,如果没有故障,实际档位初始值为0x2:N挡
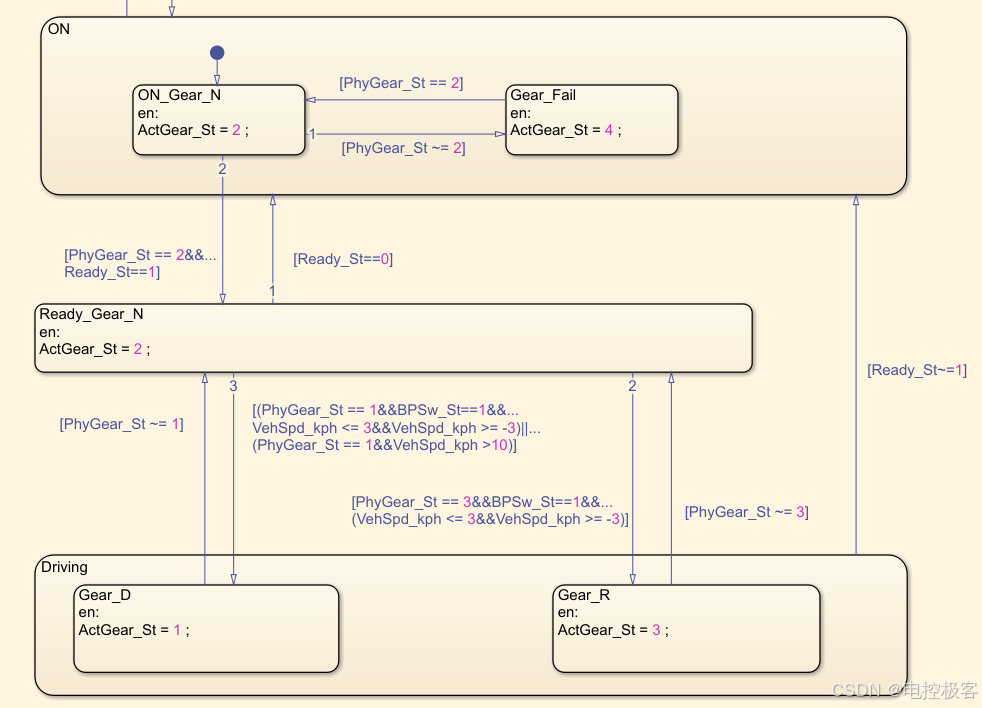
3)没有档位故障的状态下,接收到物理档位为0x2:N挡,且车辆Ready,进入Ready N挡状态
4)在Ready N挡状态下,当接收到制动开关信号有效且物理档位为D挡且-3km/h≤车速≤3km/h,或者物理档位为D挡且车速>10km/h,实际档位输出为0x1:D挡;当接收到物理档位信号不为0x1:D挡,则切换实际档位为0x2:N挡
5)在Ready N挡状态下,当接收到制动开关信号有效且物理档位为R挡且-3km/h≤车速≤3km/h,实际档位输出为0x3:R挡;当接收到物理档位信号不为0x3:D挡,则切换实际档位为0x2:N挡
6)在Ready状态,且实际档位为D挡或R挡状态下,检测到车辆Ready信号丢失,则切换实际档位为0x2:N挡
4、Simulink模型搭建
1)输入输出信号及State状态机模块搭建,由于换挡控制涉及到较多的状态跳转,使用Stateflow比较便于控制,关于Stateflow模块的具体操作方法可以参考之前发布的《实例讲解Stateflow使用方法详细步骤》

2)档位状态初始化及ON挡状态档位故障判断
3)Ready N挡状态与行车D挡或R挡状态的切换,以及行车D挡、R挡状态与ON挡状态之间的切换
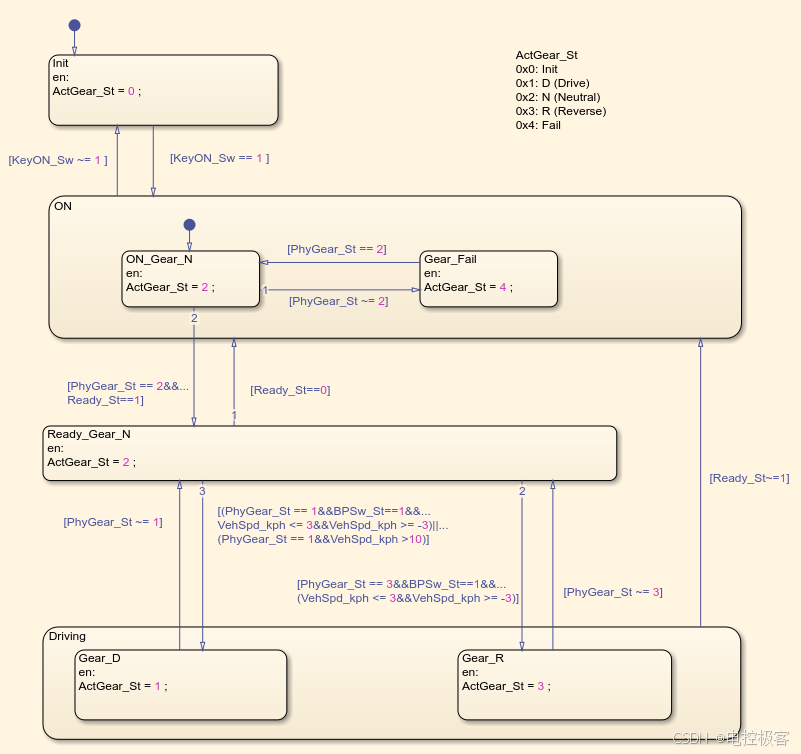
4)整个换挡控制模型
5、仿真运行测试,无故障

四、总结
本文介绍了电动汽车一般换挡控制原理、换挡控制策略及换挡控制Simulink模型搭建方法。当然这只是针对无变速箱直驱电动汽车的换挡控制方式,对于带变速箱的电动汽车,换挡控制逻辑会更复杂。希望通过本文的介绍可以给相关技术人员带来一些参考和帮助。
欢迎关注同名微信公众号:汽车电控研习室


















 847
847

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











