







目录
一、VCU的硬件选型的主要因素
电动汽车整车控制一般原理如下图所示。
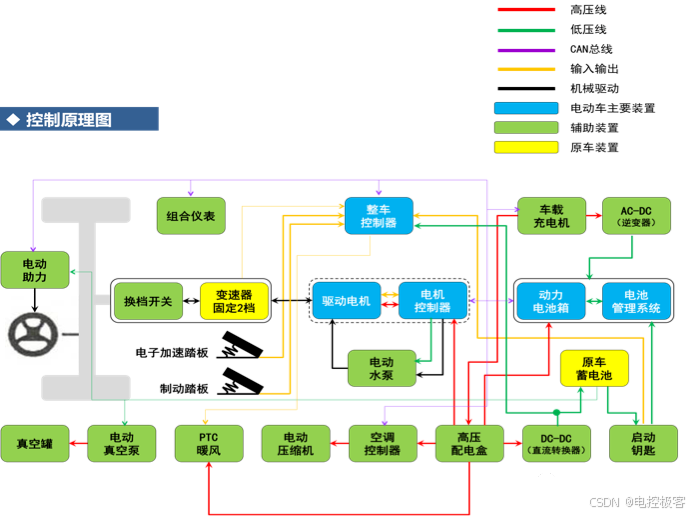
VCU的硬件选型主要考虑以下因素,一般包括额定工作电压、工作电压范围、工作功耗、静态电流、CAN通道、硬线唤醒源、数字输入输出信号通道、模拟信号通道、PWM输入输出信号通道等
1、额定工作电压:一般由整车低压平台电压决定,比如整车低压平台电压为12V,则VCU的
2、工作电压范围:对于12V低压电压平台,正常工作电压范围一般为9V-16V,对于24V低压电压平台,正常工作电压范围一般为16V-32V。有的硬件为提高兼容性,在硬件设计时,会兼容12V平台价及24V平台,正常工作电压范围为9-32V
3、工作功耗:功耗一般来说在保证VCU正常工作情况下,尽可能的低。我们开发的一款VCU功耗要求低于100W
4、静态电流:静态电流为VCU在休眠状态的耗电电流,在设计时应使静态电流尽可能的低,以避免车辆停机状态,VCU处于休眠状态时持续消耗蓄电池电量,若静态电流过大长时间可能会导致蓄电池馈电。
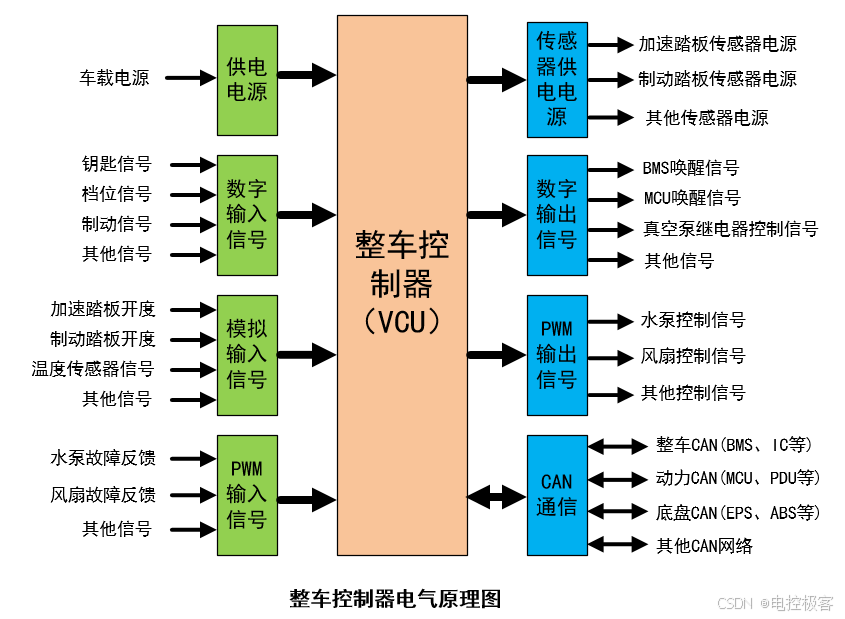
5、CAN通道:根据功能需求设计CAN通信网络拓扑,一般根据功能需求会将CAN网络划分为整车域、动力域、底盘域等,根据划分的CAN网络个数决定需要的CAN通道个数
6、硬线唤醒源:一般VCU需要输出硬线唤醒信号给BMS、MCU或其他控制器,从而将其他控制器从休眠状态唤醒至正常工作状态,硬线唤醒源的个数需要根据整车需要被唤醒的控制器个数来决定
7、数字输入输出信号通道:根据功能需求及控制方式,确定需要几个数字输入信号,几个数字输出信号,数字输入信号,比如说钥匙ON挡信号、START信号、档位请求信号、模式切换开关信号等,数字输出信号,比如真空泵继电器控制信号、风扇继电器控制信号等,数字信号根据输入输出有效电压的高低分为低边输入输出信号及高边输入输出信号
8 、模拟信号通道:根据功能需求及控制方式,确定需要几个模拟输入信号通道,模拟输入信号,比如说加速踏板信号1、加速踏板信号2、制动踏板行程信号、蒸发器温度传感器等
9、传感器电源输出通道:根据使用的传感器个数,确定需要几传感器电源输出通道,比如加速踏板供电电源1、加速踏板供电电源2、真空泵传感器供电电源
10、PWM输入输出信号通道:根据功能需求及控制方式,确定需要几个PWM输入信号通道,几个PWM输出信号通道,PWM输入信号通道,比如说水泵故障反馈信号、风扇故障反馈信号,PWM输出信号通道,比如说水泵控制信号、风扇控制信号等
11、一般情况,在VCU系统开发中要遵循平台化、通用化原则,即多个车型可以共用同一个硬件,以便在功能需求发生变更,需要增加接口时无需重新开发硬件,而是可以与原来的VCU共用硬件。
以下列出两个信号的VCU硬件的选型对比。
| 产品型号 | VCU3300 | VBU2000 | |
| 电压平台 | 12V(9-18V) | 12/24V(9-32V) | |
| 唤醒电路 | 4路 | 5路 | |
| CAN通讯电路 | 3路 | 3路 | |
| 输入 | 开关量输入(高有效) | 8 | 9 |
| 开关量输入(低有效) | 9 | 9 | |
| 模拟量输入 | 9 | 12 | |
| PWM输入 | 5 | 5 | |
| 输出 | 高边驱动输出 | 4 | 8 |
| 低边驱动输出 | 18 | 18 | |
| 传感器电源输出 | 3 | 6 | |
| PWM输出 | 4 | 4 | |
二、VCU硬件接口定义的设计方法
1、VCU供电电压平台
根据整车电气架构确定整车低压电压平台,根据整车低压电压平台(一般与整车选择的低压蓄电池电压一致)确定VCU电压平台为12V还是24V
2、根据功能需求及零部件选型确定各零部件的控制方式
1)核心三电控制:
BMS控制方式:一般需要1路硬线唤醒信号,唤醒信号一般为高有效数字输出信号,其他信号为CAN信号控制
MCU控制方式:一般需要1路硬线唤醒信号,唤醒信号一般为高有效数字输出信号,其他信号为CAN信号控制
PDU控制方式:一般通过CAN信号控制接触器闭合或断开
DCDC控制方式:一般为CAN信号控制DCDC启动或停止
2)驾驶意图识别控制:
加速踏板信号采集:一般为两路0-5V模拟信号,需要两路5V传感器供电电源输出及两路传感器信号输入
制动踏板信号:一般为1路制动踏板开关信号和1路制动踏板行程模拟信号
档位信号:一般为硬线数字输入信号或CAN信号
钥匙信号:一般为硬线输入信号
3)制动助力系统控制:
根据选择的制动助力系统形式,确定制动助力系统控制方案,制动助力系统一般包括真空助力系统、液压助力制动系统、气压助力制动系统
a、真空助力系统:大部分小型及轻型车辆选择真空助力系统,真空助力制动系统一般依靠控制真空泵工作在真空罐一侧产生真空度,当踩制动踏板时,由于压力差的存在,产生助力作用
采用真空助力系统,VCU一般有1路真空压力传感器供电电源输出及1路真空压力传感器信号输入;有1路真空泵继电器控制输出数字信号
b、电子液压助力制动系统:部分小型及轻型车辆选择液压助力制动系统,EHB以电机为动力源,摆脱真空依赖,并引入了电控单元和多种传感器,使得制动系统实现电控化。当驾驶员踩下制动踏板时,助力电机或油泵电机开始工作,产生油压并经过制动器油缸,为制动器油缸提供充足的油压,从而实现刹车。
采用液压助力制动系统,VCU一般通过CAN信号控制油泵电机启停及转速,从而调节制动助力
c、气压助力制动系统:一般大型车辆会选择气压助力制动系统,该系统核心组件包括储气筒、气泵、减压阀以及制动气室。在驾驶员踩踏刹车踏板时,气泵会向气室注入压缩空气,从而提升气室内的气压并产生推力,进而驱动制动器对车辆的制动轮施加力量,使车辆减速或停止。
采用气压助力制动系统,VCU一般有2路气压传感器供电电源输出及2路气压传感器信号输入,当气压值低于一定数值,通过CAN信号控制气泵工作,当气压值高于某一设定数值,通过CAN信号控制气泵停机
4)转向助力系统控制:
根据选择的转向助力系统形式,确定转向助力系统控制方案,转向助力系统一般包括电动助力转向系统(EPS)、电子液压转向助力系统(EHPS)
a、电动助力转向系统(EPS):一般小型或轻型车辆会选择EPS系统,EPS是利用电动机直接提供转向助力,省去了液压动力转向系统所需的油泵、油管等部件。
采用EPS,VCU一般通过CAN信号控制转向电机启停,EPS控制器通过采集当前车速及转向角度调节转向助力
b、电子液压助力转向系统(EHPS):一般轻型及重型采用EHPS系统,EHPS在液压转向助力系统的基础上加入了电子控制单元(ECU),根据车速、转向角度等信息调节转向助力的大小,液压泵产生高压油液,通过油路传递到转向机构,为驾驶员提供转向助力。
采用EHPS,VCU一般通过CAN信号控制转向油泵电机启停,EHPS控制器通过采集当前车速及转向角度调节转向油泵转速从而调节转向助力
5)水泵、风扇等低压附件控制:
根据选择的水泵风扇规格,确定水泵风扇的控制方案,水泵风扇的控制方式一般包括继电器控制及PWM控制
a、继电器控制:VCU通过输出数字信号控制继电器断开与闭合,从而控制风扇或水泵的供电与否,控制风扇水泵的启停,可以有单挡或多挡继电器控制水泵风扇以不同转速工作
b、PWM控制:VCU通过输出PWM信号控制水泵或风扇的转速,同时可以接受水泵风扇反馈的PWM信号进行故障诊断
6)空调压缩机、暖风PTC等高压附件控制:
根据选择的空调控制面板及空调压缩机控制器形式,确定空调压缩机控制方案,空调压缩机的控制方式一般包括硬线控制和CAN控制
a、硬线控制:VCU通过采集的空调面板输入的空调压缩机请求硬线数字信号,以及采集蒸发器温度传感器的温度信号,并通过逻辑判断后,输出空调压缩机启停硬线数字信号,完成空调压缩机的启停及高低速控制
b、CAN控制:VCU通过采集的空调面板输入的CAN信号空调压缩机请求,以及采集的蒸发器温度传感器的温度信号,并通过逻辑判断后,输出空调压缩机启停CAN信号及空调压缩机转速控制CAN信号
根据选择的暖风控制面板形式,确定暖风PTC的控制方案,暖风PTC控制方式一般包括硬线控制和CAN控制
a、硬线控制:VCU通过采集暖风控制面板输入的PTC请求硬线数字信号,并通过逻辑判断后,输出PTC高压接触器闭合或断开指令,PDU接收到指令后控制PTC高压接触器的闭合或断开
b、CAN控制:VCU通过采集暖风控制面板输入的PTC请求CAN信号,并通过逻辑判断后,输出PTC高压接触器闭合或断开指令,PDU接收到指令后控制PTC高压接触器的闭合或断开
三、总结
本文介绍了电动汽车VCU硬件选型的主要因素,并介绍了VCU硬件接口定义的设计方法。VCU硬件选型和接口定义设计在VCU系统设计中至关重要,是通过整车需求进行VCU设计的第一步。希望通过本文的介绍能给相关技术人员带来一定参考和帮助。
欢迎关注同名微信公众号:汽车电控研习室


















 731
731

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











