










四足机器人(一)----MATLAB simulink对四足机器人物理建模
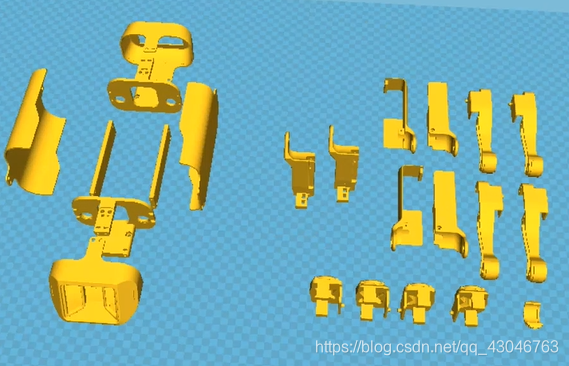
那么我们就需要将这些3D模型导入到MATLAB的建模中,打开MATLAB后可以在命令页面输入smnew,弹出simulink页面,也可以在主页点击simulink图标建立物理模型,双击方块,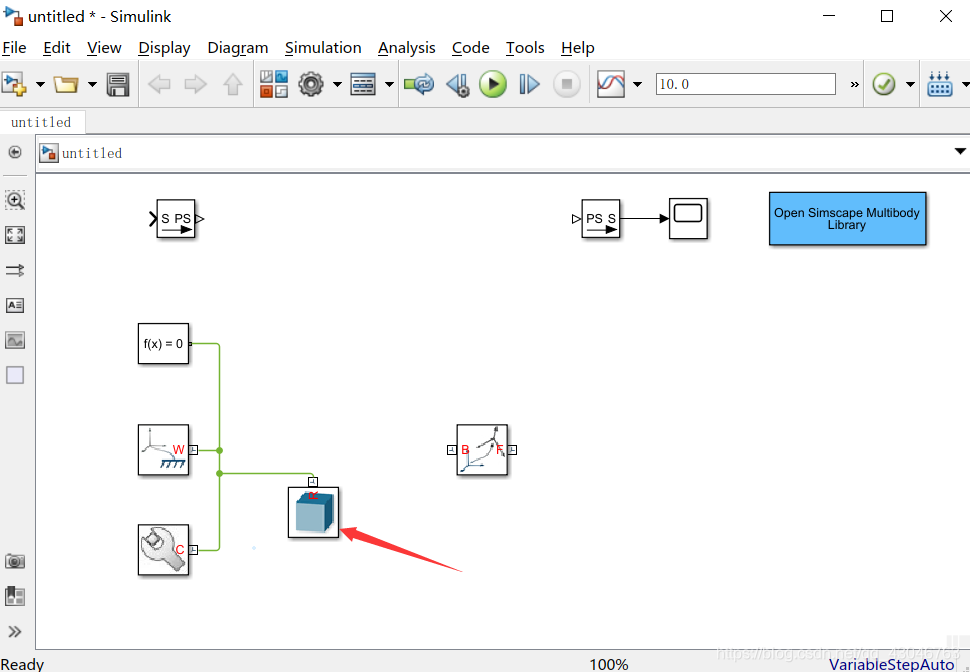
首先建立一个平面,我们随后建立的机器狗就可以在该平面上走动了,参数设置为[1000 500 1]。
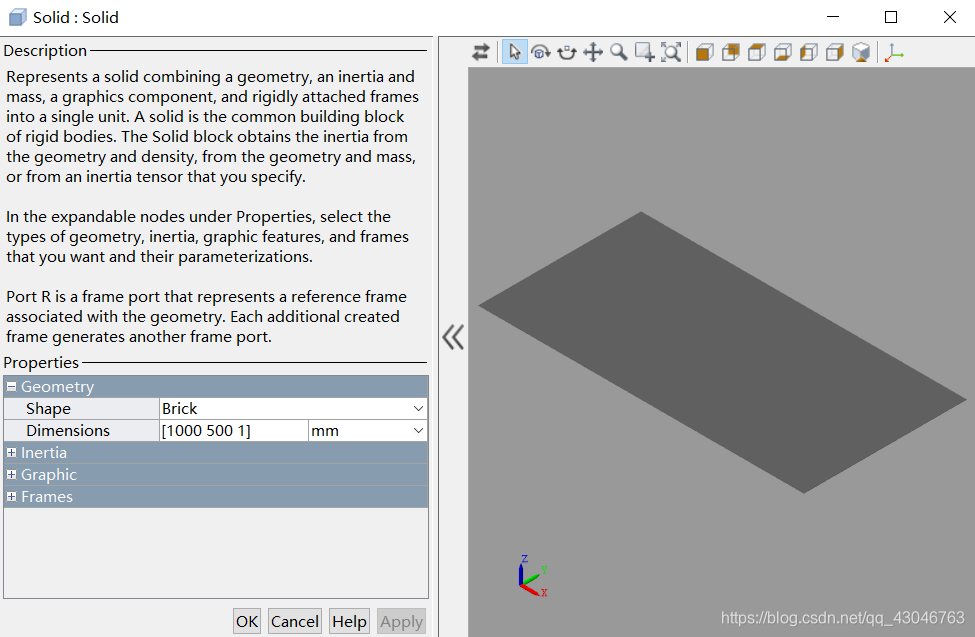
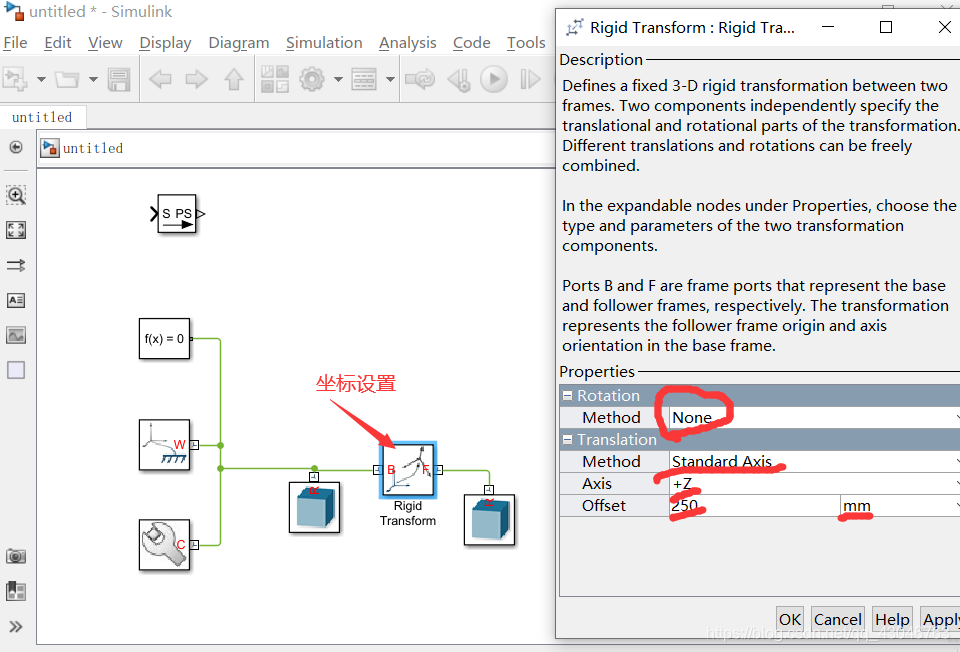
建立完毕后可以点击simulink的运行按钮就可以在MATLAB中看到建立的平面。此时就可以将我们的物理模型导入了,鼠标右键solid拖动solid模块就可以复制出一个一模一样的元件出来,此时开始对该模块进行编辑,双击新的solid模块进行导入模型。首先将body的模型导入,并且与之前的模块相连,并设置坐标,因为我们的物理模型是要在平面上方的,不设置坐标的话会放在和平面重合的位置,所以我们要对坐标进行设置,因为3D模型的尺寸原因我们将body的模型高度设置为250mm。
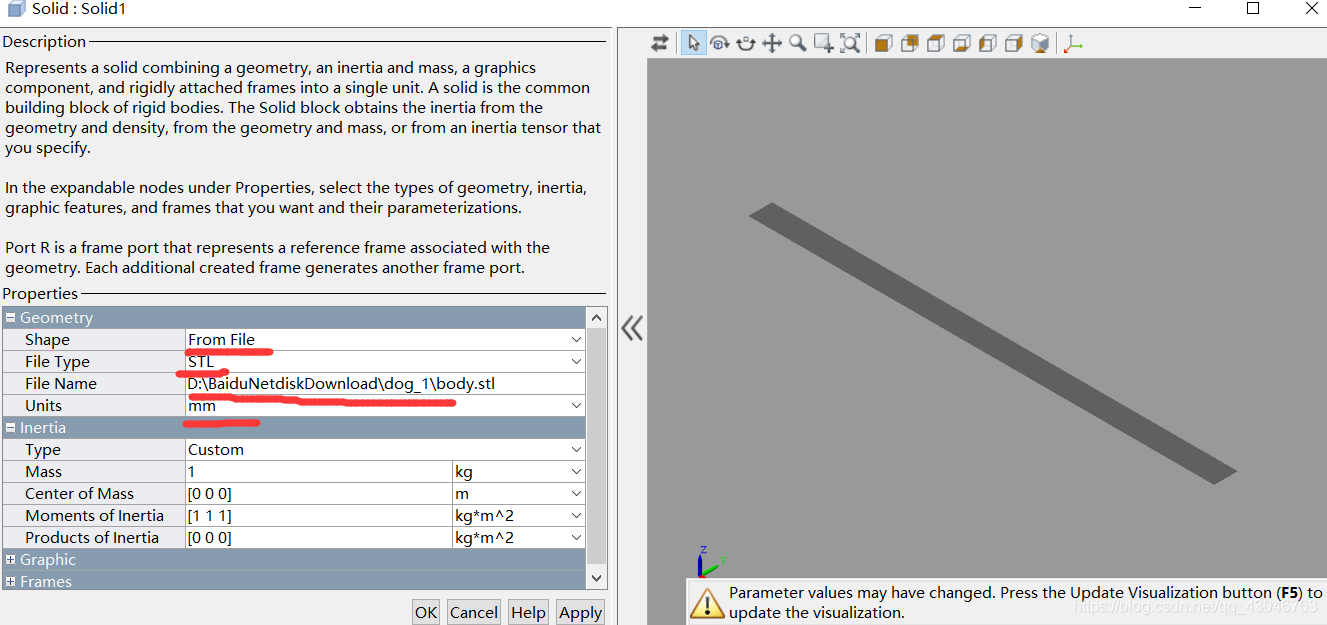
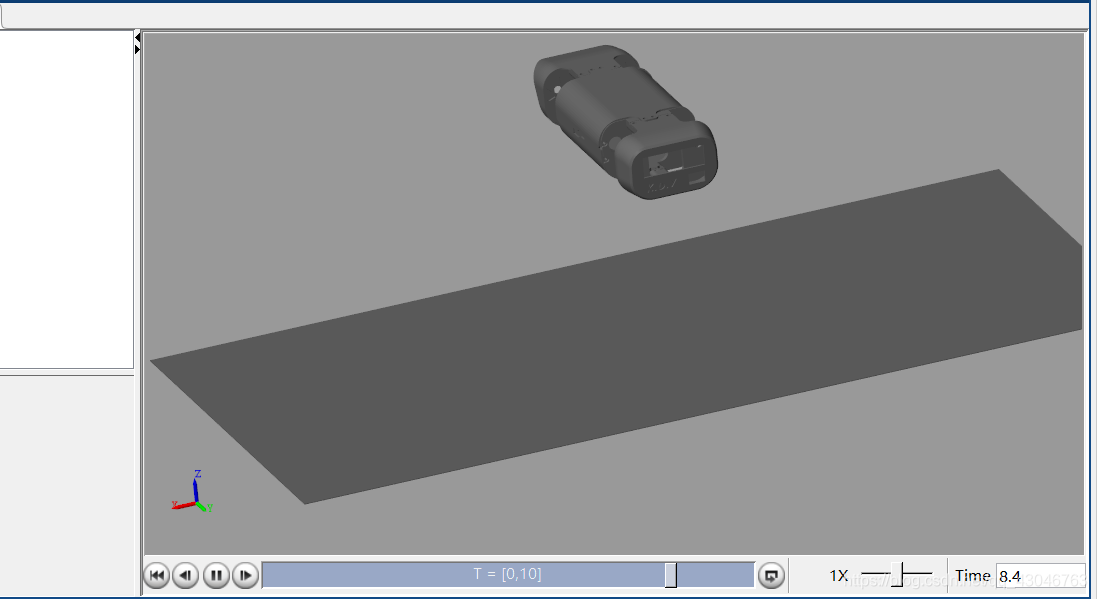
设置完成并连接后点击运行按钮,我们可以看到模型已经成功导入。
那么接下来就是各个腿的导入了,原理和导入body一样。下面给出髋关节的坐标参数。
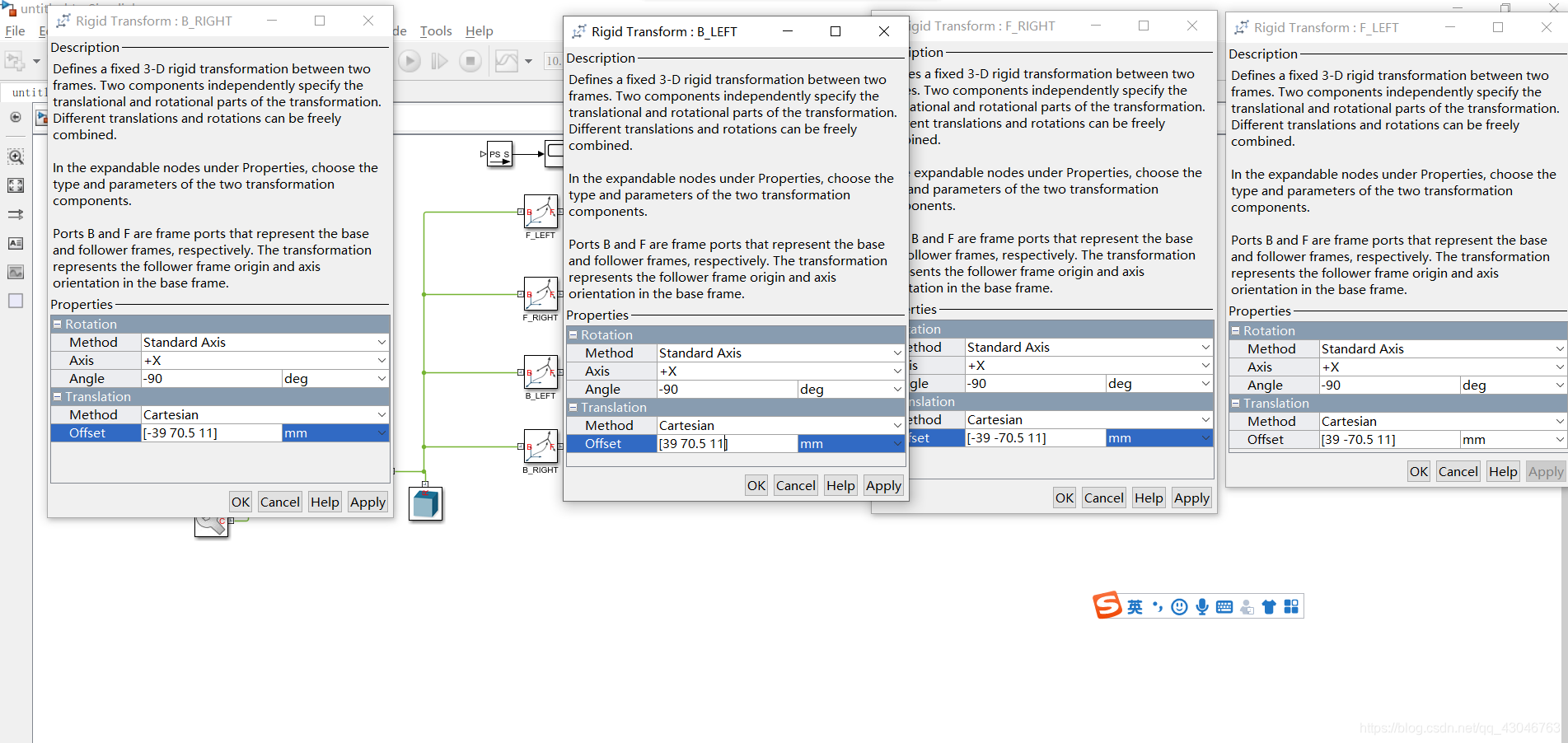
随后我们将其他关节部分导入,以下是参数。




坐标建立好后将模型也导入后点击运行按钮我们可以看到在MATLAB仿真界面出现了我们的模型。

那么我们发现四足机器人的腿是直立的,而且不会动,那么我们就要加入轴转动的动作。
 加入到我们的模型中,变成了这样。
加入到我们的模型中,变成了这样。

但是细心的人肯定会观察到为什么你的joint元件有三只引脚,我的只有两个,那是因为需要改里面的参数,如果以两个引脚的方式放进去后运行会发现腿来回摆动,也不听使唤。这是因为元件的重力让模型在摆动,那么此时我们就要将转轴设置为有输入量时转动,以下为改动的地方,所有的joint模块改完之后就和上图一样,这样一来腿就不会乱动了。

此时我们转动模型会发现模型的脚没有接触到平面,此时就要调用一个库,点击MATLAB主页中的附加功能,进入获取附加功能,找到simulink。


如果你是正版的MATLAB,可以点击从GitHub中添加然后下载就可以,如果是破解版的就需要自己手动下载,然后放到和从GitHub添加的路径一样下就可以了,但是我懒得找这个路径了,比较麻烦,所以直接在simulink仿真的时候打开这个库就可以了。

打开后点击3D,进入找到Sphere to Plane Force图标,将它拉到工程中。 双击进行设置,这个是设置圆和球面的接触,参数如下:

将他接到每一条腿上,这样我们的模型就站在了平面上。

但是发现布局很乱,所以我们就要将各个模块合并一下,选中一个关节,Ctrl+g就可以进行合并,最终整合成这个样子。

那其实现在我们的模型其实还是没有站在上面,所以我们要给一个六自由度的模块6-DOF Joint,放在平面模组的后面。再次运行,模型就掉到了平面上。


到这里整个模型导入已经完成,下次的话就是要对运动学逆解进行讲解。


















 420
420

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









